1
21) 4669161/10
(22) 30.03.89
(46) Z3.06.91 . Бюл. N° ..3
(75) Ю.И.Голубь
(53)681.269(088.8)
(56)Авторское свидетельство СССР V 634408, кл. В 65 О 67/22, 1976.
Авторское свидетельство СССР № 101U9.10, кл. Г, 01 Г, 11/00, 1981.
(54)ВЕСОИЗМЕРИТЕЛЬНОЙ УСТРОЙСТВО ДЛЯ РОТОРНОГО ЭКСКАВАТОРА
(57)Изобретение относится к весоизмерительной технике и позволяет повысить точность загрузки железнодорожных полувагонов. В двухрукавиой течке 8 с шибером 9 и механизмом 10
е го переброски имеются направляюще 11,12 для материала, в одной плоскости с которыми расположены грузоприем- ные платформы 13,14 с снлоизмеритель- ными датчиками 19,20. Для установки шибера в одно из двух положений служит узел управления 40, воздействующий на механизм 10 и элементы управления 38,39, сигналы которых управляют коммутаторами 28,29, через которые в сумматор 30 поступает информация с интеграторов 26,2/, на входы которых поступают сигналы соответственно с блоков умножения 24,25, пропорциональные текущей производительности материала на грузоприемных платформах 13,14. 2 ил.
с «
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Весодозировочное устройство для роторных экскаваторов | 1991 |
|
SU1816969A1 |
| Дозатор непрерывного действия | 1985 |
|
SU1278598A1 |
| Весовое устройство | 1986 |
|
SU1500847A1 |
| ЭЛЕКТРОННЫЕ ВЕСЫ | 2012 |
|
RU2517793C2 |
| Устройство для взвешивания движущихся железнодорожных составов | 1982 |
|
SU1089427A1 |
| Способ поосного взвешивания железнодорожных вагонов в движении и устройство для его осуществления | 1981 |
|
SU1023205A1 |
| Конвейерные весы | 1983 |
|
SU1137327A1 |
| Устройство для взвешивания транс-пОРТНыХ СРЕдСТВ | 1979 |
|
SU808865A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1571415A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1229584A1 |
Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точности загрузки железнодорожных полувагонов .
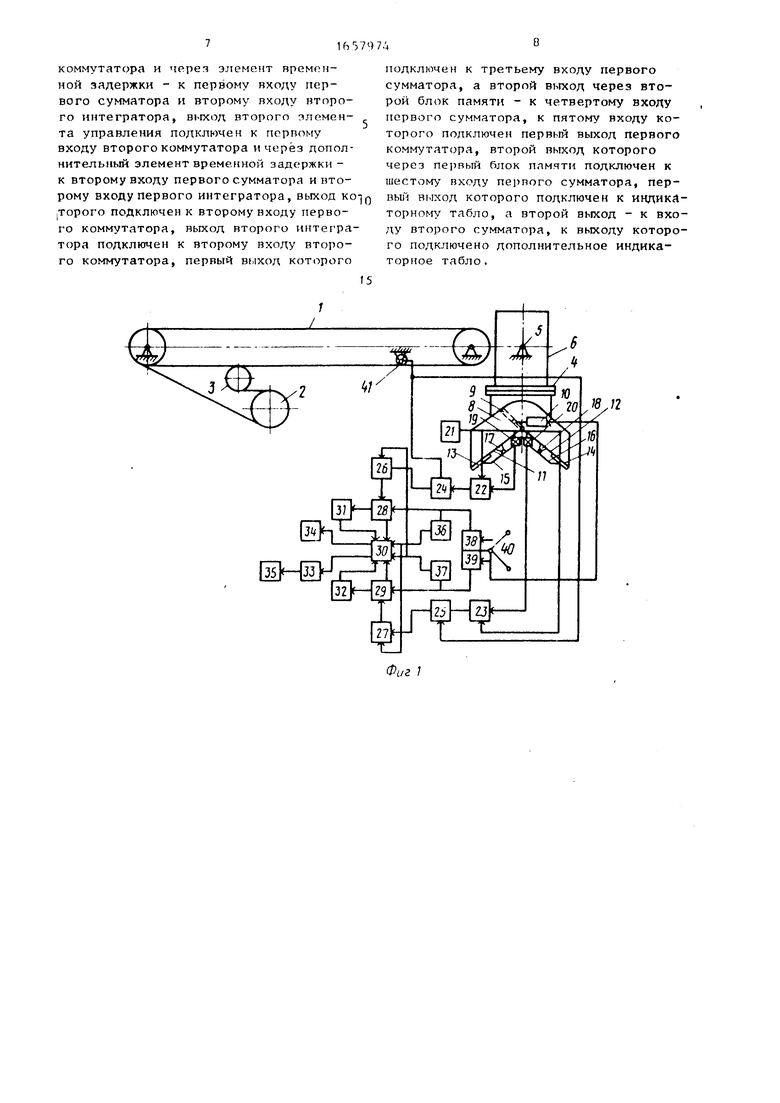
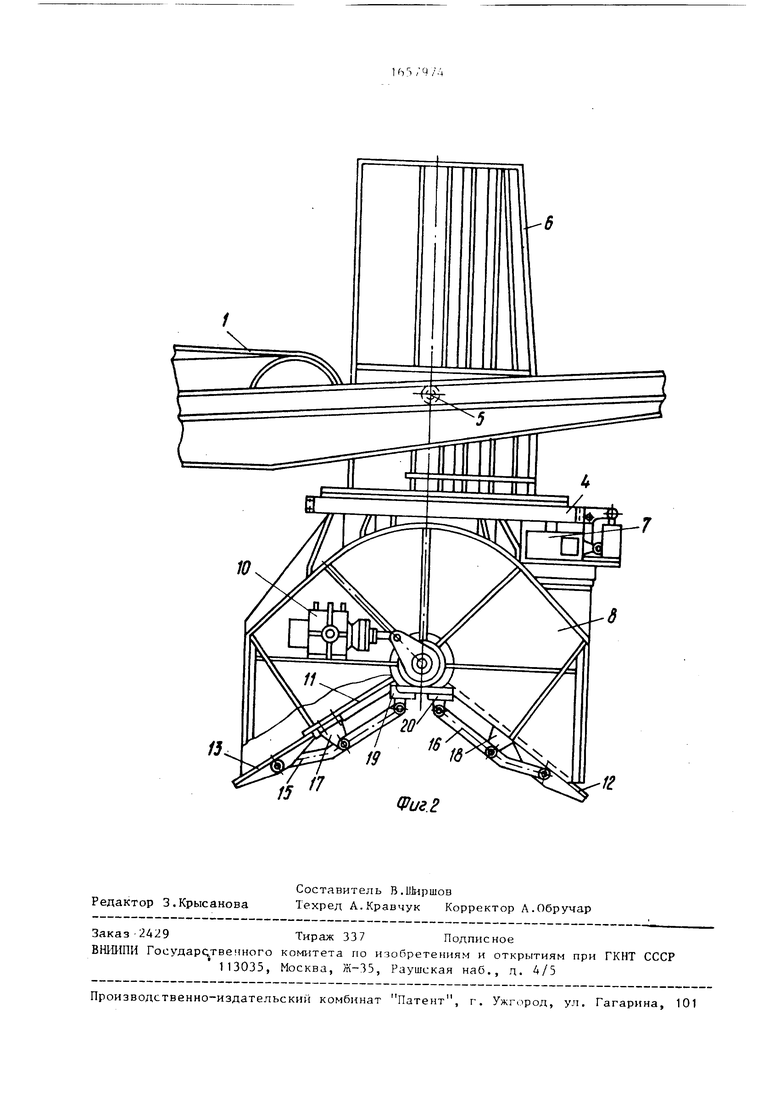
На фиг. 1 показана схема предлагаемого устройства; на фиг. 2 - опорно-поворотное разгрузочное устройство с встроенными грузоприемными платформами , Общий ВИД .
Ленточный транспортер 1 роторного экскаватора имеет привод 2 и механизм натяжения 3.
Для загрузки железнодорожных полувагонов используется опорно-поворотное разгрузочное устройство 4, включающее в себя установленный на опорах 5 отбойный щит 6, привод 7, двух- рукавную течку 8 шибером 9 и механизмом 10 его переброски.
Течка 8 имеет направляющее 11,12, в одной плоскости с которыми расположены грузоприемные платформы 13,14, которые посредством рычагов 15,16 и шарнирных опор 17,18 соединены с си- лоизмерительными датчиками 19,20.
Кроме датчиков 19,20 весоизмерительное устройство содержит источник питания 21, блок сравнения 22, дополнительный блок сравнения 23, блок умножения 24, дополнительный блок умножения 25, первый 26 и второй 27 .интеграторы, первый 28 и второй 29 коммутаторы, первый сумматор 30, первый 31 и второй 32 блоки памяти, второй сумматор 33, индикаторное табло 34, дополнительное индикаторное табло 35, элемент временной задержки 36, дополнительный элемент временной задержки 3/, первый 38 и второй 39 элементы
о ел 1
со а
управления, учел управления шибером 9 и датчик скорости 4 1 ленточного транспортера 1 .
Устройство работает следующим об- разом .
Транспортируемый материал сбрасы- вается с ленточного транспортера 1 и, ударяясь в отбойный щит , ссыпается в двухрукавнуи течку 8 и п зависимое- ти от положения шибера Ч поступает на направлякмцую 11 или 12 и цалее на грузоприемную платформу 13 :ыи 14 соответственно.
Усилие от грузоприе-мной платформ. 13 рычагом 15 передается на силоизмг- рительнын датчик 14.
В блока сравнения 2. определяется разница между сигналами источника гш- гания 21 и датчика 19, которая зави- сит от количества материала, находящегося на грузоприемнон платформе 13. Выходио,i сигнал блока сравнения 22 поступает на один из входов блока ум- jножения 24, на другой вход которого подается сигнал с датчика скорости 41 На выходе блока умножения 24 вырабатывается сшнал, пропорциональный мгновенной производительности, который поступает на вход первого инте- гратора 26.
Выходной сигнал первого интегратора 26 через первый коммутатор 28 поступает на первый сумматор JU (сумматор текущей производительности).
Результат суммирования индицируется на табло 14 .
При установке оператором шибера 9 в другое положение (посредством узла управления 40, воздействующего на ме- ханизм Ю переброски шибера Ч) материал будет поступать на направляющую 12 и далее на грузоприемную платформу 14 .
Аналогично описанному в дополни- тельном блоке сравнения 23 выделяется сигнал, пропорциональный массе материала на грузоприемной платформе 14.
Этот сиг рал поступает в дополнительный блок умножения .15, где перемножается с сигналом датчика скорости 4 1 .
Сигнал, пропорциональный мгновенной весовой производительности, с выхода блока 25 поступает на вход втор го интегратора 2/.
На выходе второго интегратора 2/ формируется сигнал, пропорциональный
5
0 5 Q
5
0
текущей весовой производительности и поступающий на вход первого сумматора 30. Результат суммирования отображается на табло 34. При достижении номинального значения массы в загруженном вагоне (оператор визуально : контропирует этот процесс либо это осуществляется автоматически с помощью пведенного в устройство эадатчи- ка доз) узлом управления 40 подается сигнал на изменение направления потока материала, т.е. переброс шибера 9. Одновременное с этим подается сигнал с первого элемента управления 38 на управляющий вход коммутатора 28 и на элемент временной задержки 36. Так как время начала срабатывания механизма 10 пеп Орога шибера 9 больше времени срабатывания коммутатора 28, то до того еще, ка шиПер 9 начнет перемещение, сигнал с элемента управления )8 изменит направление поступления информации с интегратора 26. Теперь сигнал с интегратора 26 будет поступать не в сумматор 30, а в блок памяти 31. В тот момент, когда шибер 9 начнет перемещение, часть потока материала будет продолжать ссыпаться - направляющей 12 и измеряться на грузоприемной платформе 14 силоизме- рнте/ч-чым датчиком 20. Значения этой производительности будут продолжать заноситься ч сумматор 30 и показы- иатьс.т на табло 34. Эта величина бу- ,, соответствовать материала, загруженной в заполняемый вагон. Одновременно часть потока материала начнет ссыпаться по направляющей 11 и грузиприемнон платформе 13 в пустой вагон . Значение этой массы будет измеряться силоизмернтельным датчиком 19 и после интегрирования в интеграторе 2Ь будет заноситься в блок памяти 31. Иисле того, как шибер 9 полностью займет свое новое положение, он потноетью перекроет поступление материала по направляющей 12 на гру- зоппиемную платформу 14, а по направляющей 11 и грузоприемной платформе 1 3 будет проходить весь поток ссыпаемого материала. После того, как по грузоприемной платформе 14 пройдут последние остатки материала, т.е. они будут измерены, в сумматоре 30 и на табло 34 будет значение сигнала, соответствующее массе материала, находящегося в загружаемом вагоне. г выхода сумматора 30 сигнал поступа- |ЬГ,
ет не только на табло 34, но и в сумматор 33 и с него на табло 35. Сумматор 33 регистрирует весовую проитводи- тельность роторного экскаватора, т.е. массу отгружаемого материала, за определенный отрезок времени - смену, сутки и т.д., и имеет спецнал1 ны | ввод для ручного сброса показаний. Бремя переброса шибера 2-Ь с.
В соответствии с этим и построен процесс весоизмерения при переходе с одного вагона на другой. Характерной особенностью является то, что одновременно измеряются и масса материала, досыпаемого в догружаемый вагон, и масса материала, ссыпаемого в пустой вагон, причем они не смешиваются, а на табло 34 в сумматоре 3D фиксируются только значения, соответствующие мае- се, загруженной в заполненный вагон, а масса материала, ссыпаемого в пустой вагон, заносится с интегратора 26 в блок памяти 31.
Время действия сигнала с элемента управления 38 на управляюгрш вход коммутатора 28 ограничено. Отстройка величины временного интервала осуществляется экспериментально, но при этом выполняется одно непременное условие - оно должно быть больше времени переброса шибера. После прекращения действия управляющего сигнала коммутатор 28 возвращается в исходное положение, т.е. сигнал с интегратора 26 поступает опять в сумматор 30. Одновременно прекращение поступления сигнала в блок памяти 31 является сигналом для выдачи хранимой в нем информации в сумматор 3;). Но прежде чем заносить новую информацию н сумматор 30, необходимо очистить его от информации, находящейся н нем. Эту функцию выполняет элемент временной задержки 36. За 1 с до прекращения действия сигнала с элемента управления 38 элемент временной выдержки 36 срабатывает и сигнал на стирание информации поступает на управляющий сумматора 30 и одновремен- но на управляющий вход интегратора 27. После очищения сумматора 30 и прекращения действия сигнала с элемента управления 38 информация с блока памяти 31 поступает в сум- матор 30 и вся информация с интегратора 26 тоже поступает в сумматор 30.
В дальнейшем процесс весоизмерения протекает аналогично, т.е. загрузка других вагонов и переход с одного вагона на другой осуществляются по аналогии с описанным выше. Формула изобретения
Весоизмерительное устройство для роторного экскаватора, содержащее грузоприемную платформу с силоизмери тельным датчиком, датчик скорости ленточного транспортера, узел управления шибером двухрукавной течки опорно-поворотного разгрузочного устройства, первый и второй интеграторы, блок сравнения, блок умножения, элемент временной задержки, индикаторное табло и источник питания, отличающееся тем, что, с целью повышения точности загрузки железнодорожных полувагонов, в него введены дополнительная грузоприемная платформа с дополнительным силоизмерительным датчиком, первый и второй коммутаторы, первый и второй сумматоры, дополнительный блок сравнения, первый и второй блоки памяти, дополнительный блок умножения, дополнительный эле- мент временной задержки, первый и второй элементы управления н дополнительное индикаторное табло, причем грузоприемная платформа установлена в одном рукаве, а дополнительная грузоприемная платформа - в другом рукаве двухрукавной течки опорно-поворотного разгрузочного устройства в одной плоскости с соответствующими направляющими для материала двухрукавной течки и связаны с силоизмерительными датчиками посредством рычагов, к одному входу блока сравнения подключен источник питания непосредственно, а к другому входу - через силоизмери- тельный датчик, к одному входу дополнительного блока сравнения подключен источник питания непосредственно, а к другому входу - через дополнительный силоизмерительный датчик, к одним входам блока умножения и дополнительного блока умножения подключе н датчик скорости ленточного транспортера, а к другим их входам - выходы соответственно блока сравнения и дополнительного блока сравнения, выход блока умножения подключен к первому входу первого интегратора, а выход дополнительного блока умножения - к первому входу второго интегратора, выход первого элемента управления подключен к первому входу первого
коммутатора и через элемент времен- нон задержки - к первому входу первого сумматора и второму входу второго интегратора, выход второго элемента управления подключен к первому входу второго коммутатора и через дополнительный элемент временной задержки - к второму входу первого сумматора и второму входу первого интегратора, выход KO-JQ дорого подключен к второму входу первого коммутатора, выход второго интегратора подключен к второму входу второго коммутатора, первый выход которого
15
подключен к третьему входу первого сумматора, а второй выход через второй блок памяти - к четвертому входу первого сумматора, к пятому входу которого подключен первый выход первого коммутатора, второй выход которого через первый блок памяти подключен к шестому входу первого сумматора, первый выход которого подключен к индикаторному табло, а второй выход - к входу второго сумматора, к выходу которого подключено дополнительное индикаторное табло.
fy if
)8J2
15
К
Фиг. 2
