wVjr sin (рд/2 ) + d cos (P - 90° )f (€1 -cos (Ј - 90° ) d sin (/9 - 90° )
| название | год | авторы | номер документа |
|---|---|---|---|
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1274970A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ КОНДИТЕРСКИХ ПЛАСТОВ | 1994 |
|
RU2101957C1 |
| Шайбонавивочный автомат | 1979 |
|
SU810347A1 |
| Устройство для обработки оптических деталей | 1990 |
|
SU1816659A1 |
| Пресс-автомат | 1985 |
|
SU1263546A1 |
| Устройство для подачи проволоки к гвоздильному автомату | 1976 |
|
SU698709A1 |
| Зубчатый кулисно-реечный механизм | 1982 |
|
SU1125428A1 |
| Преобразователь равномерного вращенияВ HEPABHOMEPHOE B МЕХАНизМЕ пОВОРОТАСТАНА ХОлОдНОй пРОКАТКи ТРуб | 1979 |
|
SU804026A1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |

к- 21 «г pB
ai
(4)
at где d - длина стойки АВ;
r - длина криоошипа AF;
рд угол вращения кривошипа AF, соответствующий движению толкателя;
К - коэффициент неравномерности хода.
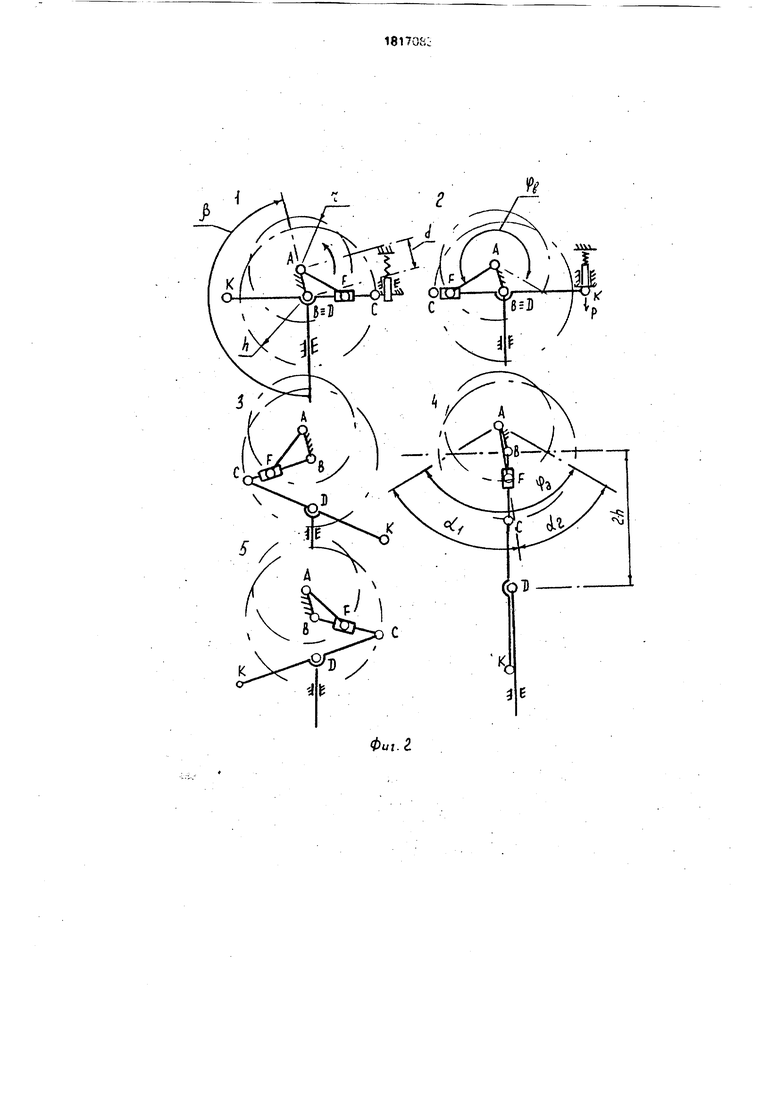
На фиг. 3 показан график функции рд - 3, 2 - г- 2, 3 - г- 1,3 при d - 1.
На фиг. 4 показан график функции К- F (/3 )1-г 3, 2 - г 2, 3 - г - 1.3 при d - 1.
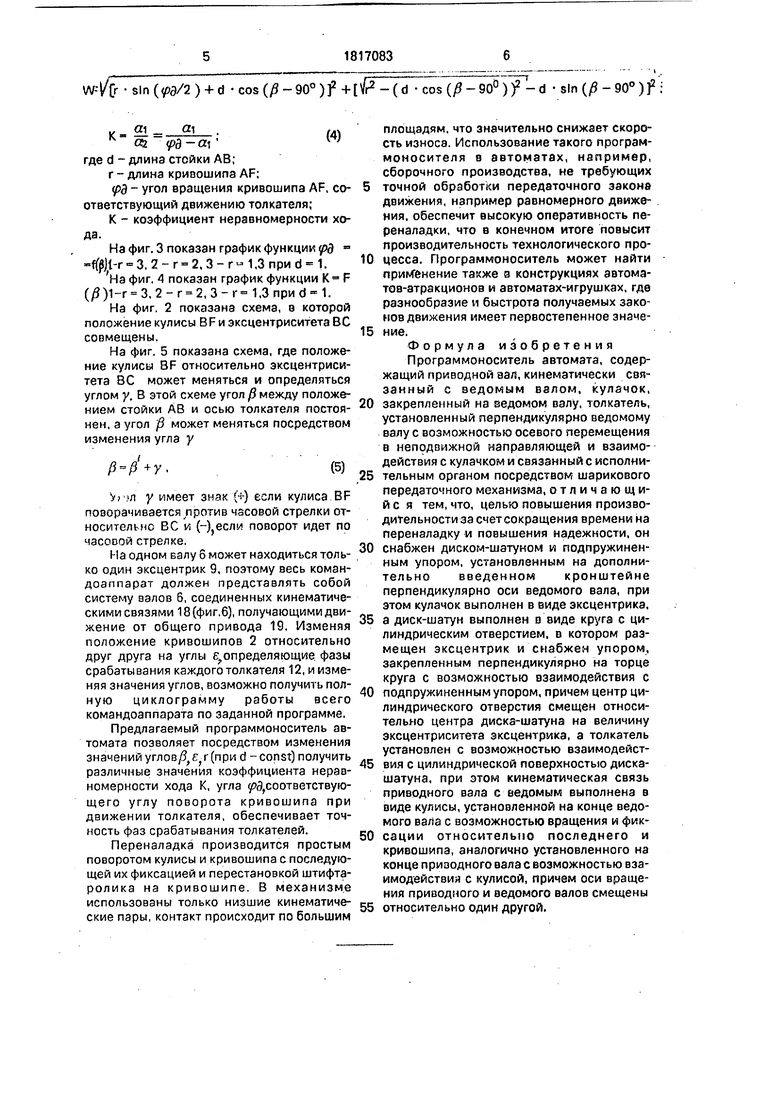
На фиг. 2 показана схема, 9 которой положение кулисы BF и эксцентриситета ВС совмещены.
На фиг. 5 показана схема, где положение кулисы BF относительно эксцентриситета ВС может меняться и определяться углом у. В этой схеме угол / между положением стойки АВ и осью толкателя постоянен, а угол j3 может меняться посредством изменения угла у
0 /3 +У.
(5)
у имеет знак ( если кулиса.BF поворачивается/фотив часовой стрелки относительно ВС и (-)}если поворот идет по часооой стрелке.
На одном валу 6 может находиться только один эксцентрик 9, поэтому весь коман- доаппарат должен представлять собой систему залов 6, соединенных кинематическими связями 18(фиг,6), получающими движение от общего привода 19. Изменяя положение кривошипов 2 относительно друг друга на углы определяющие, фазы срабатывания каждого толкателя 12, и изменяя значения углов, возможно получить полную циклограмму работы всего командоаппарата по заданной программе.
Предлагаемый программоноситель автомата позволяет посредством изменения значений углов/, е} г (при d - const) получить различные значения коэффициента неравномерности хода К, угла соответствующего углу поворота кривошипа при движении толкателя, обеспечивает точность фаз срабатывания толкателей.
Переналадка производится простым поворотом кулисы и.кривошипа с последующей их фиксацией и перестановкой штифта- ролика на кривошипе. В механизме использованы только низшие кинематические пары, контакт происходит по большим
площадям, что значительно снижает скорость износа. Использование такого программоносителя s автоматах, например, сборочного производства, не требующих 5 точной обработки передаточного закона движения, например равномерного движения, обеспечит высокую оперативность переналадки, что в конечном итоге повысит производительность технологического про0 цесса. Программоноситель может найти применение также з конструкциях автома- тов-атракционов и автоматах-игрушках, где разнообразие и быстрота получаемых законов движения имеет первостепенное значе5 ние.
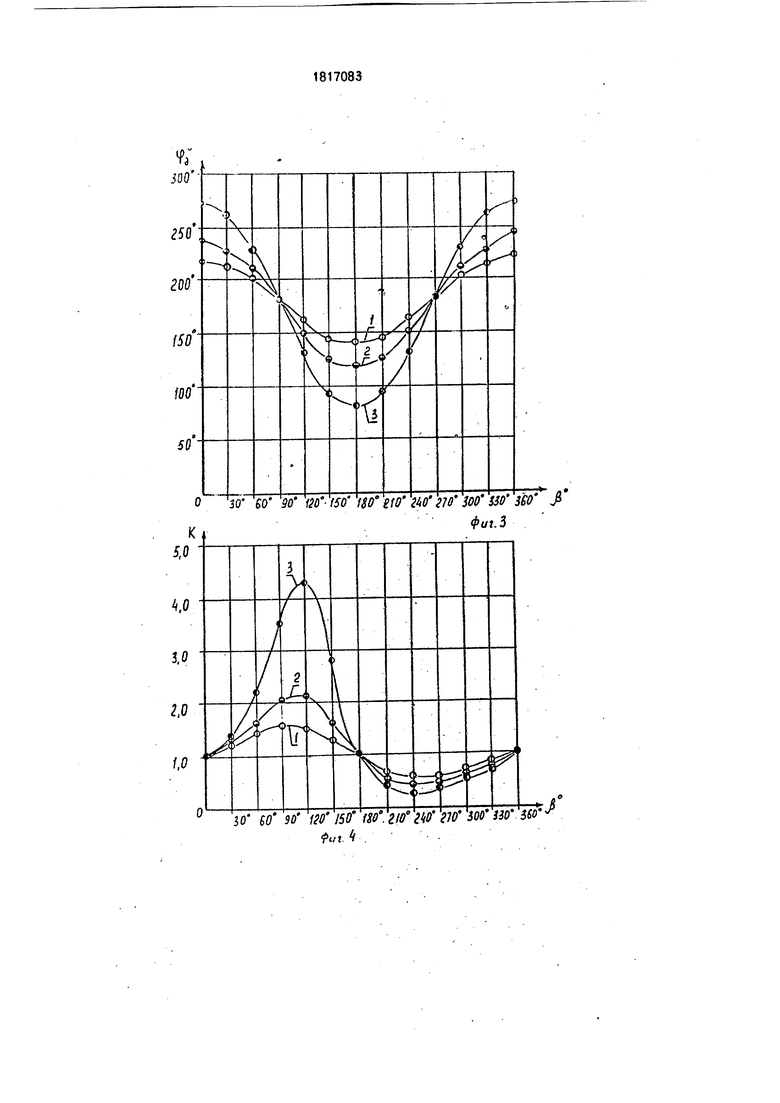
Формула изобретения Программоноситель автомата, содержащий приводной аал, кинематически связанный с ведомым валом, кулачок,
0 закрепленный на ведомом валу, толкатель, установленный перпендикулярно ведомому валу с возможностью осевого перемещения в неподвижной направляющей и взаимодействия с кулачком и связанный с исполни5 тельным органом посредством шарикового передаточного механизма, отличающийся тем, что, целью повышения производительности за счет сокращения времени на переналадку и повышения надежности, он
0 снабжен диском-шатуном и подпружиненным упором, установленным на дополнительно введенном кронштейне перпендикулярно оси ведомого вала, при этом кулачок выполнен в виде эксцентрика,
5 а диск-шатун выполнен в виде круга с цилиндрическим отверстием, в котором размещен эксцентрик и снабжен упором, закрепленным перпендикулярно на торце круга с возможностью взаимодействия с
0 подпружиненным упором, причем центр цилиндрического отверстия смещен относительно центра диска-шатуна на величину эксцентриситета эксцентрика, а толкатель установлен с возможностью взаимодейст5 вия с цилиндрической поверхностью диска- шатуна, при этом кинематическая связь приводного вала с ведомым выполнена в виде кулисы, установленной на конце ведомого вала с возможностью вращения и фик0 сации относительно последнего и кривошипа, аналогично установленного на конце приаодного вала с возможностью взаимодействия с кулисой, причем оси вращения приводного и ведомого валов смещены
5 относительно один другой.
300
ш
200
ISO
wo
50
КФиг.З
