Изобретение относится к области навигационных измерений и может быть использовано для определения текущих прямоугольных координат по информации о пройденном пути и угле между продольной осью наземного колесного объекта и проекцией на горизонтальную плоскость поворотного колеса.
В настоящее время известна наземная навигационная система типа ТНА-4, определяющая прямоугольные координаты через полярные, т.е. по величине пройденного пути и величине дирекционного угла.
Способ определения координат навигационной системой типа ТНА-4 является наиболее близким техническим решением.
Этот способ заключается в том, что в процессе движения циклически измеряют элемент пути и вычисляют координаты путем проектирования этого элемента пути на соответствующие оси координат с последующим суммированием.
aj-OM+Aa;(1) Xi XM+ASicos(aO,
Yi YM + ASisln(«),
где сц- дирекционный угол текущей точки;
Да - приращение дирекционного угла;
ОС 00
ел
со
Ј
«1-1 - дирекционный угол предыдущей точки;
Xi, YI - координаты текущей точки; Л Si - величина элемента пройденного
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2010 |
|
RU2436045C1 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ МЕСТООПРЕДЕЛЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2638358C2 |
| Аппаратура наземной навигации | 2018 |
|
RU2708550C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
Изобретение относится к навигационным измерениям и может быть использовано для определения текущих прямоугольных координат по информации о пройденном пути и угла между продольной осью наземного колесного объекта и проекцией на горизонтальную плоскость поворотного колеса. Цель изобретения - расширение области применения навигационной системы на наземных колесных объектах. Поставленная цель достигается тем, что вместо определения ди- рекционного угла ft гироскопическим прибором на начальной точке и в процессе движения предлагается использовать измеритель угла между продольной осью наземного колесного объекта и проекцией на горизонтальную плоскость поворотного колеса с последующим вычислением угла а между направлением продольной оси и одной из осей опорной прямоугольной системы координат. 2 с.п.ф-лы. 3 ил. Ј
пути;
Хм, YI-I - координаты предыдущей точки.
Система ТНА-4 состоит из датчика угла и датчика пути, связанных с координатором.
Однако известный способ имеет следу- ющие недостатки. Данная система требует жесткой привязки к широте местности гироскопического прибора, определенногб времени подготовки к работе, а также технической сложности и значительной сто- имости применяемого гироскопического прибора.
Целью данного изобретения является расширение области применения навигационной системы на наземных колесных объ- ектах.
Поставленная цель достигается тем, что вместо определения дирекционного угла ft гироскопическим прибором на начальной точке и в процессе движения, предлагается использовать измеритель угла между продольной осью наземного колесного объекта (НКО) и проекцией на горизонтальную плоскость поворотного колеса с последующим вычислением угла а между направлением продольной оси НКО и одной из осей опорной прямоугольной системы координат.
Фиг. 1-3 иллюстрируют изобретение.
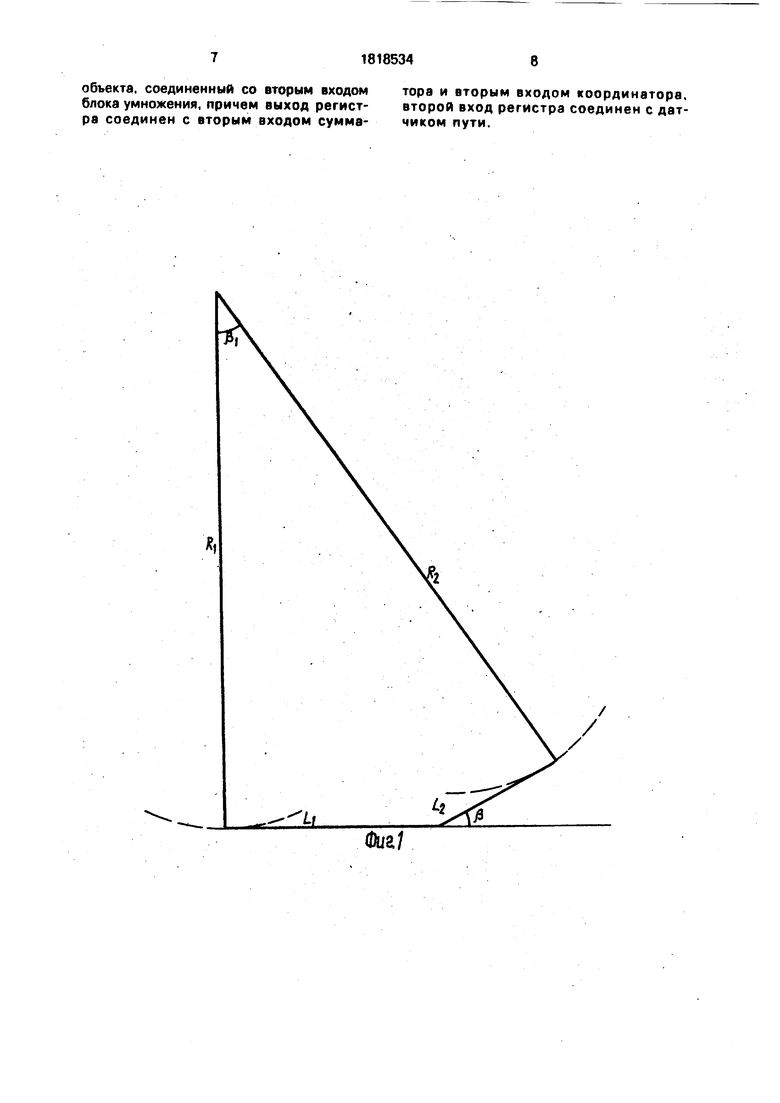
Рассмотрим определение приращений Д угла а(фиг.1, поясняющая зависимость угла ft от радиусов поворота передних и задний колес),
где Li - pace гояние от оси заднего колеса до оси рулевой олонки;
1 2-расс дние от оси переднего колеса до оси рулев i колонки;
RI - ради /с поворота заднего колеса;
R2 - радиус поворота переднего колеса;
ft - угол между п родол ьной осью назем- ного колесного объекта и проекций на горизонтальную плоскость переднего колеса (угол между направлениями заднее колесо - рулевая колонка и переднее колесо - рулевая колонка).
Ri-LLi и R2-LL2, т.к. радиус, проведен- ный в точку касания прямой, ей перпендикулярен. Следовательно, ft как углы с соответственно перпендикулярными сторонами. Затем сделаем следующие преобразования: выразим RI и Ra через ft, Li и Lz.
L,+ U
Ri
c,0ffi -Li-«g0H
ta(0)
sin(/3)
-.(2)
(/3) -cos(/3) sln/3
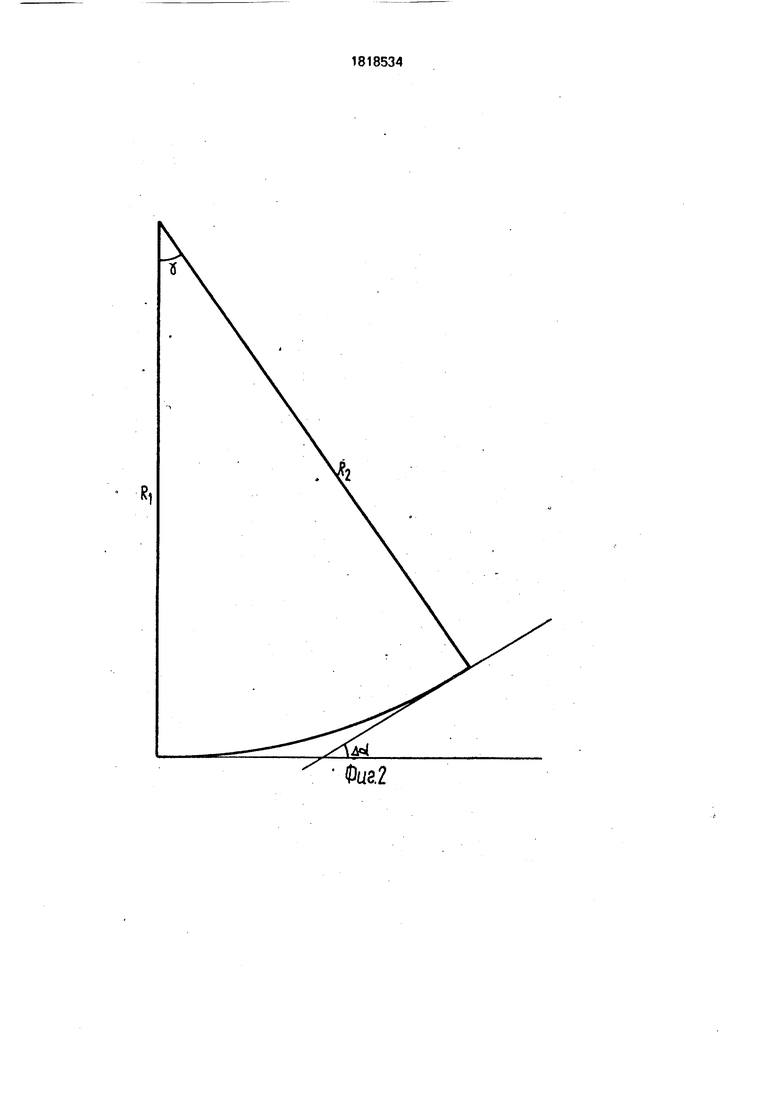
При постоянном угле/8 движение происходит по окружности, тогда (фиг.2) поясняющая зависимость изменения угла а от радиуса поворота и величины пройденного пути, при прохождении элемента пути S, угол а изменится на величину Да. Рассмотрим движение поворотного переднего колеса.
S
у Да
FV
Учитывая, получаем:
Да
U
. Li-l2 sln(0)-Cos(0) sln(0)
S-sin(fl)
U-L2 +
La
cos(/3)
При La « Ц и LI - L изменение угла а определяется как
Дом 2 sin (# )
и.соответствен но определяются текущие координаты:
XN-XN-I+ ASN cos(ob2 f -sin()) (3)
i L
YN YN-1+ Д5ы sln(ab + 2: f -sln(/3i))
I L
0
55
45
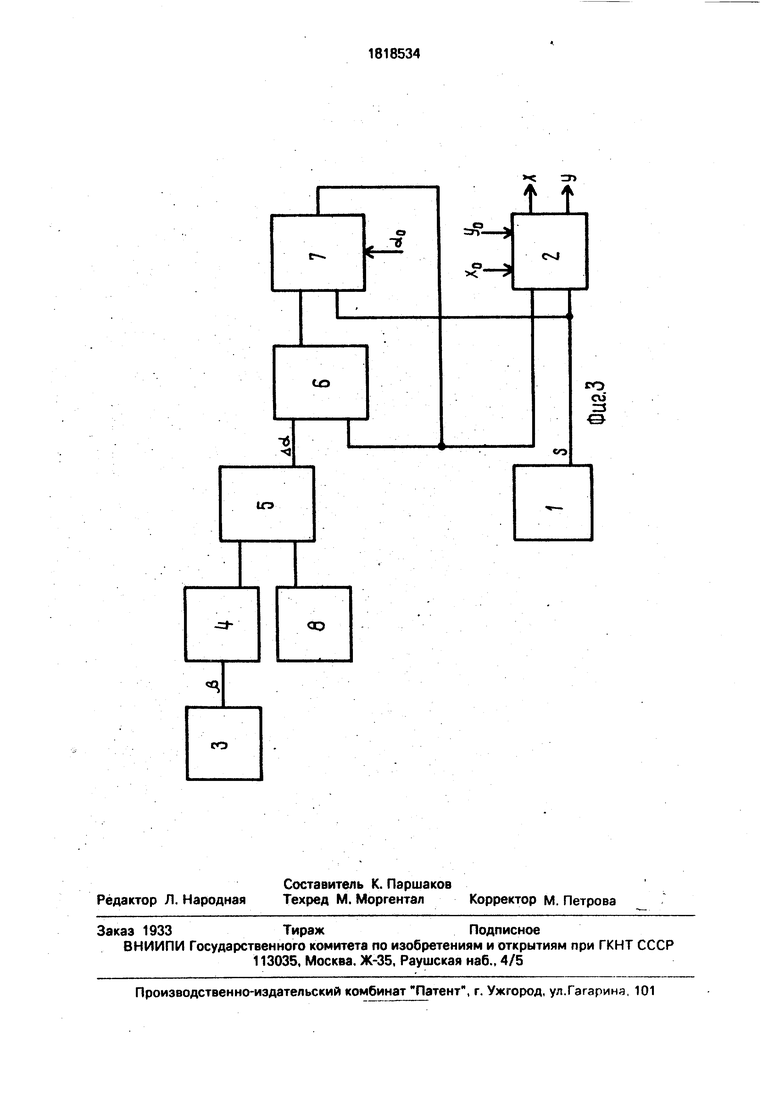
На фиг. З приведена блочная схема устройства, реализующая данный способ, на которой даны следующие обозначения;
ft- угол между продольной осью НКО и проекцией на горизонтальную плоскость поворотного колеса;
S -элемент пройденного пути:
AS - расстояние между двумя пройденными точками;
L- расстояние между осями передних и задних колес, величина базы НКО;
а-увеличение угла между направлением продольной оси НКО и одной из осей опорной прямоугольной системы координат,
Да - приращение угла а
Устройство для определения координат НКО состоит из датчика пути 1 и координатора 2 с начальными значениями координат, причем выход датчика пути 1 соединен с первым входом координатора 2.
В нее дополнительно введены датчик угла между продольной осью НКО и проекцией на горизонтальную плоскость поворотного колеса 3, синусный преобразователь 4, блок умножения 5, сумматор 6 и регистр с начальным значением дирекционного угла 7, соединенные последовательно, а также задатчик кода отношения цены импульса датчика пути к базе НКО 8, соединенный со вторым входом блока умножения 5, причем выход регистра 7 соединен со вторым входом сумматора б и вторым входом координатора 2, а второй вход регистра соединен с датчиком пути.
Устройство для определения коррдинат НКО работает следующим образом.
В исходном состоянии на координате 2 устанавливают начальные значения координат X и Y, а в регистре 7 - значение угла по НКО.
При движении НКО, по прохождении пути, соответствующего цене импульса, датчик пути 1 вырабатывает импульс, по которому координатор 2 вычисляет значение текущих координат в соответствии с выражением (1).
Текущее значение угла а в процессе движения определяется следующим образом.
Датчик угла 3 определяет угол ft между продольной осью НКО и проекцией поворотного колеса на горизонтальную плоскость, и его значение подается на синусный преобразователь 4, который вычисляет код синуса этого угла. Блок умножения 5 определяет величину поправки к углу До, перемножая код sin (б) на величину отношения цены импульса датчика пути к базе 8, т.к. на сумматоре 6 эта поправка прибавляется к текущему значению угла а, код которого поступает с выхода регистра 7. По каждому импульсу пути новое значение угла а записывается в регистр 7. Таким образом на координатор 2 поступает -текущее значение угла а, определенное в соответствии с выражением:
ON ON-I + (S/L) -sin 03м): N - 1,2,3,...
Координатор 2 вычисляет значения координат в соответствии с выражением (1) и (3).
В качестве датчика угла можно использовать разнообразные преобразователи угол-код, описанные в (2). Вал датчика соединяется с рулевой колонкой, а его корпус с шасси НКО.
Формула изобретения 1. Способ определения координат наземного колесного объекта, включающий дискретное измерение в процессе движения объекта приращений пути, проектирование полученного приращения на оси базовой системы координат, суммирование одноименных проекций с учетом начальных условий, отличающийся тем, что, с
целью расширения области использования, в процессе движения измеряют угол / между продольной осью наземного колесного объекта и проекцией поворотного колеса на горизонтальную плоскость, а значения текущих координат определяют в соответствии со следующими зависимостями:
25
XN XN-I+ ASN costob + -sin(/3i),
i L
+ ASN sln(ab
+ЈA
I L
sln(#),
где fi - угол между продольной осью наземного колесного угла и проекцией поворотного колеса на горизонтальную плоскость; XN, YN - координаты текущей точки; XN-L YN-I - координаты предыдущей точки;
A SN-расстояние между двумя текущими точками; A Si - приращение пути;
L- величина базы наземного колесного объекта;
N-1,2.3...;
Оо - начальное значение дирекционного угла.
объекта, соединенный со вторым входом блока умножения, причем выход регистра соединен с вторым входом сумматора и вторым входом координатора, второй вход регистра соединен с датчиком пути.
/
/
/
Фиа.2
со
TJ
-о
m
it
ro
CO
«o
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зверев А,Е | |||
| и др | |||
| Преобразователи угловых перемещений в цифровой код | |||
| Л.: Энергия, 1974 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Насос | 1917 |
|
SU13A1 |
