Изобретение относится к аэрофотосъемке и может быть использовано для получения информации об объектах, находящихся на земной или водной поверхности, например, скоплениях животных или следах промышленных загрязнений, а также об объектах морского промысла - косяках рыбы или скоплениях водорослей.
Предлагаемая схема залета исключает несъемочные участки за счет применения круговой траектории полета, позволяющей выполнять непрерывную съемку в одном постоянном режиме полета без потери из поля зрения объекта, что увеличивает чисто съемочное время в полете до 50-60% и более в зависимости от особенностей снимаемого объекта, а также позволяет получить за счет этого более точные и информативные снимки объекта.
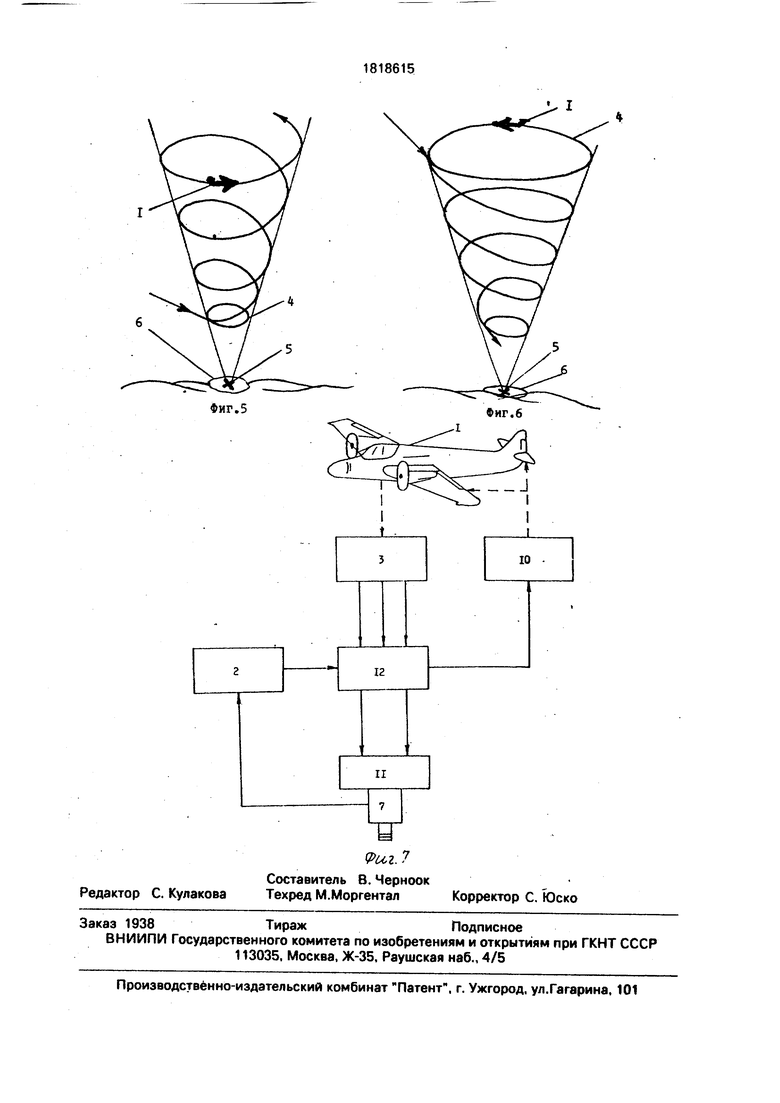
На фиг.1 представлена в плане траектория перехода самолета на круговую траекторию; на фиг.2 - общий вид круговой траектории полета самолета в процессе съемки; на фиг.З -схематичное расположение съемочного оборудования на самолете; на фиг,4-6 представлены различные варианты траекторий полета самолета в процессе съемок объекта; на фиг.7 - блок-схема устройства, позволяющего реализовать способ.
Способ съемки осуществляется следующим образом.
При полете самолета 1, например, над поверхностью моря в зоне возможного нахождения исследуемого обьекта осуществляется поиск объекта съемки и при его обнаружении, во время пролета над ним, датчиками измерительных приборов 2, или по сигналу наблюдателя определяются координаты одной из его точек посредством бортового навигационного комплекса 3. После этого с учетом параметров полета самолета (высота, скорость) рассчитываются параметры маневра самолета для перевода его на круговую траекторию 4, центр 5 которой в плане расположен в точке с указанными координатами. После вывода самолета на круговую траекторию (фиг.2) осуществляется непрерывная съемка обьекта 6 посредством съемочного оборудования 7, например, телевизионной камеры (фиг.З), угол визирования 8, который вычисляется в зависимости от заданной высоты и от угла 9 крена самолета 1, необходимого для полета с заданным радиусом виража. При этом съемка осуществляется в течение времени, необходимого для надежной идентификации обьекта, для определения характеристик пространственного его перемещения, а также для оценки возможных изменений
во времени других параметров объекта, например, формы пятна загрязнения.
Для наибольшего приближения к объекту б радиуса круговой траектории полета
самолета равен минимальному радиусу виража самолета 1. В случае, когда площадь объекта значительна и не может попасть в поле зрения съемочного оборудования целиком, для определения границ объекта поеле полета самолета по круговой траектории в течение необходимого для оценки объекта времени, дальнейшую съемку осуществляют при полете по спирали с увеличением радиуса виража на постоянной высоте и с
постоянным углом визирования (фиг.4). Полет по спирали с увеличением радиуса виража может совершаться и с набором высоты (фиг.5), при этом обеспечивается увеличение осматриваемой площади без потери из
пояя зрения центральной точки объекта. Полет по спирали может совершаться и со снижением (фиг.6). В этом случае радиус круговой траектории выбирается большим минимального радиуса виража самолета, а
снижение осуществляется с уменьшением
радиуса до минимального. Этот случай может быть реализован в случае необходимости детализации центральной области объекта съемки.
0 Заявляемый способ реализован на ма-. невренном самолете: АН-28, содержащем навигационный комплекс 3 Квиток, позволяющем определять мгновенные значения координат самолета, его скорость, высоту, а
5 также углы крена и тангажа, систему автоматического управления 10 САУ-28, съемочное оборудование 7 (например, телевизионную камеру), установленное на поворотную платформу 11, и бортовой вы0 числитель 12, сопряженный с поворотной платформой 11, навигационным комплексом 3 и системой автоматического управления 10 (фиг.7).
Для обнаружения объекта может быть
5 использован связанный со съемочным оборудованием 7 и с бортовым вычислителем 12 измерительный прибор. 2. Обнаружение объекта может быть осуществлено и бортовым наблюдателем, который при обнаруже0 нии объекта съемки в момент пролета над ним дает сигнал в бортовой вычислитель 12, запоминающий мгновенные значения координат самолета. Бортовой вычислитель 12 в соответствии с определенными координата5 ми вычисляет необходимые углы поворота рулевых поверхностей 13 самолета для перевода его на круговую траекторию с центром в заданной точке и с учетом значений высоты, скорости, углов тангажа и крена, поступающих из навигационного комплекса
3, рассчитывает угол поворота поворотной платформы 11 для обеспечения направления оптической оси съемочного оборудования б на точку с указанными координатами. В дальнейшем для осуществляется полета по одному из описанных вариантов (фиг.4- 6) в бортовой вычислитель вводятся команды, задающие курс следования самолета в соответствии с выбранным вариантом траектории его полета в процессе съемок.
Заявляемый способ был неоднократно опробован при авиасъемках загрязнений над безориентированными акваториями Баренцева моря и Онежского озера.
Съемка выполнялась с маневренного самолета АН-28. Высота съемки изменялась от 50 до 1000 м. Угол крена самолета над объектом съемки (загрязнения) при полете по кругу или спирали изменялся от 5 до 45°, диапазон скорости - 160-250 км/ч. Радиус траектории над объектом съемки составлял при этом от 300 до 1500 м. Например, мини- мальный радиус разворота самолета АН-28 во время аэросъемок при скорости 180 кг/ч составлял при угле крена 30°:
у 30°
V 180 км/ч 50 м/с
2 д -sin у R
где V - скорость самолета; R - радиус разворота; g- ускорение свободного падения; . у - угол крена самолета
V
50 -50
500(м).
Таким образом, при скорости полета 180 км/ч и крене 30° может быть обеспечен радиус разворота 500 м. При высоте съемки Нс 500 м, потребный угол отклонения поворотной платформы с камерой съемочного оборудования от поперечной оси самолета 75°, а при высоте съемки Нс 1000 м, угол отклонения уменьшится до 60°.
Расчеты и опыт работы показывают возможность постоянного удержания объекта съемки в поле зрения датчиков в наиболее
используемом диапазоне высот и скоростей съемки. Использование способа съемки с борта самолета обеспечивает по сравнению с существующими способами такие преимущества, как увеличение в полете чисто съемочного времени, а также возможность выполнять непрерывную съемку в одном постоянном режиме полета без потери из поля зрения объекта съемки, что позволяет получать более точные и информативные снимки.
Формула изобретения
1. Способ съемки с борта самолета, включающий обнаружение объекта съемки,
осуществление маневра с выводом самолета на траекторию съемки и осуществление съемки съемочным оборудованием, отличающийся тем, что, с целью повышения информативности и точности съемки, при
обнаружении объекта съемки определяют координаты одной из его точек, траекторию съемки выбирают круговой с центром в точке, координаты которой определены, а оптическую ось съемочного оборудования в
процессе съемки непрерывно направляют на эту точку.
2. Способ по п. 1, о т л и ч а ю щ и и с я тем, что круговая траектория имеет радиус, равный минимальному радиусу виража са- молета.
3. Способ по п.2, отличающийся тем, что после вывода самолета на круговую траекторию, съемку осуществляют при полете по спирали с увеличением радиуса ви- ража.
4. Способ по п.З, отличающийся тем, что полет по спирали осуществляют с одновременным увеличением высоты полета.
5. Способ по п.1,отличающийся тем, что круговая траектория имеет радиус, больший минимального радиуса виража самолета, а после вывода самолета на круговую траекторию, съемку осуществляют при
полете с уменьшением высоты полета по спирали с одновременным уменьшением радиуса виража самолета до минимального.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| СПОСОБ ВЫЗОВА СБРОСА СНЕЖНЫХ ЛАВИН | 2010 |
|
RU2458201C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| Система аэромониторинга залежек морских животных | 2015 |
|
RU2609728C1 |
| Способ измерения пространственных диаграмм направленности антенн воздушных судов в условиях полёта | 2018 |
|
RU2692818C1 |
| Способ оценки маловысотного контура управления ЛА | 2018 |
|
RU2691984C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ СБРОСЕ ГРУЗОВ В ТОЧКУ ЗЕМНОЙ ПОВЕРХНОСТИ С МАНЕВРИРУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2295104C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |

Использование: для получения информации об объемах, находящихся на земной или водной поверхности. Сущность изобретения заключается в том, чтр при полете 6 самолета 1 при обнаружении объекта съемки 6 определяют координаты одной из его точек 5, осуществляют маневр с выводом самолета на круговую траекторию 4, центр которой расположен в точке 5, и осуществляют съемку съемочным оборудованием, оптическую ось которого непрерывно направляют на эту точку 5, причем круговая траектория может иметь радиус, равный ми-, нимальному радиусу виража самолета, а съемку можно осуществлять при полете по спирали с увеличением радиуса виража и высоты полета. Если круговая траектория имеет радиус, больший минимального радиуса виража самолета, то съемку можно осуществлять при полете с уменьшением высоты полета по спирали с одновременным уменьшением радиуса виража самолета до минимального. 4 з.п. ф-лы, 7 ил. w ё 00 со Оч ел 
| Шершень А.И | |||
| Аэрофотосъемка | |||
| М.: Геодезиздат, 1956 | |||
| Байков Н.С., Трясучкин Н.А., Иванов В.И | |||
| Самолетовождение при аэрофотосъемке | |||
| М.: Недра, 1973 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
