Известны способы управления реверсивным электроприводом, например экскаватора, выполненным по системе генератор-двигатель с питаиием обмоток возбуждеиия генератора от двух магнитных усилителей, заключающиеся в том, что выходной сигнал бесконтактного командоаппарата подается при одном направлении вращения в обмотку управления одного из магнитных усилителей. Эти способы управления предполагают использование для формирования экскаваторных характеристик привода насыщенной части характеристик магнитных усилителей, что не дает возможности получить эти характеристики на всех ступенях скорости привода.
Предложенный способ отличается тем, что Е обмотку смещения магнитного усилителя, не нолучающего при данном направлении вращения задающего сигнала от командоаппарата, подается сигнал жесткой линейной обратной связи ио главному току привода, направленный встречно по отношению к сигпалу смещения, величина которого выбрана так, что магнитный усилитель работает в режиме минимального насыщения.
Такой способ управления позволяет получить экскаваторные характеристики на любой ступени скорости.
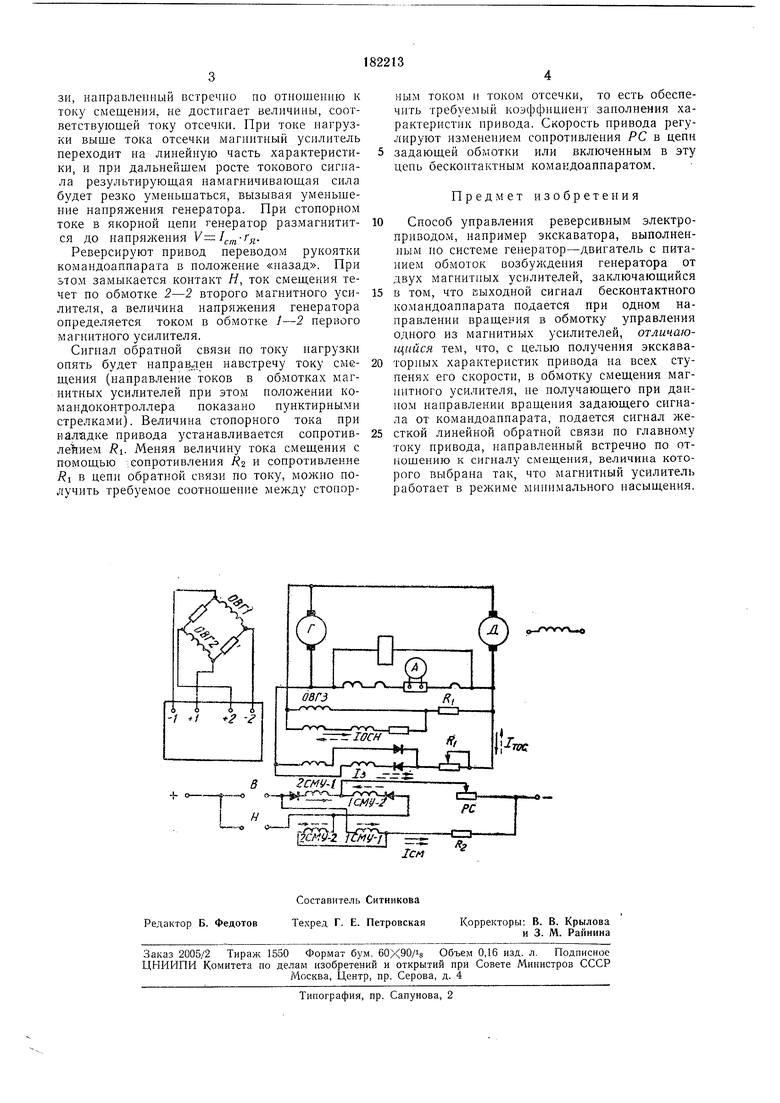
Сплошными стрелками показано направление токов при работе привода в направлении «вперед, пунктирными - в иаправлепии «назад.
Электропривод выполнен но системе генератор-двигатель с питанием обмоток возбуждения генератора ОВГ1 и ОВГ2 от двух магнитных усилителей. Генератор имеет также третью обмотку возбуждения ОВГЗ, спижающую мощность цепей независимого возбул дения генератора. При включении контактов В командоконтроллера в обмотке унравленпя одного из магпитных усилителей /-1 протекает ток смеи.ения, соответствующий работе
магнитного усилителя на участке характеристики в зоне минимальиых токов. При значительной величине тока смещения магиитный усилитель в некоторых пределах становится нечувствительным к воздействию сигнала обратной связи по току привода. В обмотке 2-/ при этом протекает задающий ток, определяющий величину напряжения генератора и, следовательно, скорость привода. Результирующая намагничивающая сила независимых обмоток возбуждения генератора равна разности намагничивающих сил, создаваемых током первого магнитного уснлителя и минимальным током второго магнитного усилителя. Эта разность намагничивающих сил осзи, направленный встречно по отпошению к току смещения, не достигает величины, соответствующей току отсечки. При токе нагрузки выше тока отсечки 1маг 1итный усилитель переходит на линейную часть характеристики, и при дальнейшем росте токового сигнала результирующая намагничивающая сила будет резко уменьшаться, вызывая уменьшение напряжения генератора. При стопорном токе в якорной цепи генератор размагнитится до напряжения У стяРеверсируют привод переводом рукоятки командоаппарата в положение «назад. При 570М замыкается контакт Н, ток смещения течет по обмотке 2-2 второго магнитного усилителя, а величина напряжения генератора определяется током в обмотке У-2 первого магнитного усилителя.
Сигнал обратной связи по току нагрузки опять будет направлен навстречу току смещения (направление токов в обмотках магнитных усилителей при этом положении командоконтроллера показано пунктирными стрелками). Величина стопорного тока при наладке привода устанавливается сопротивле ием RI. Меняя величину тока смещения с помощью .сопротивления 2 и сопротивление RI в цепи обратной связи по току, можно получить требуемое соотношение между стопорным током и током отсечки, то есть обеспечить требуемый коэффициент занолнения характеристик привода. Скорость привода регулируют изменением сопротивления PC в цепи задающей обмотки или включенным в эту цепь бесконтактным командоаппаратом.
Предмет изобретения
Способ управления реверсивным электроприводом, например экскаватора, выполненным но системе генератор-двигатель с питанием обмоток возбуждения генератора от двух магнитных усилителей, заключающийся
в том, что 15ыходной сигнал бесконтактного командоаппарата подается при одном направлении вращения в обмотку управления одного из магнитных усилителей, отличающийся тем, что, с целью получения экскаваторных характеристик привода на всех ступенях его скорости, в обмотку смещения магнитиого усилителя, не получающего при данном направлении вращения задающего сигнала от командоаппарата, подается сигнал жесткой линейной обратной связи но главному току нривода, направленный встречно по отношению к сигналу смещения, величина которого выбрана так, что магнитный усилитель работает в режиме минимального насыщения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом экскаватора | 1960 |
|
SU139703A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ГЛАВНЫМ ПРИВОДОМ РЕВЕРСИВНОГО ПРОКАТНОГО СТАНА | 1965 |
|
SU169641A1 |
| Устройство для ограничения тока нагрузки экскаваторного электропривода постоянного тока | 1980 |
|
SU1048066A1 |
| Электропривод постоянного тока | 1974 |
|
SU498701A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1967 |
|
SU205114A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1968 |
|
SU206683A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1967 |
|
SU205115A1 |
| Бесконтактное устройство для автоматического управления электроприводом постоянного тока | 1960 |
|
SU134755A1 |
| Устройство для управления возбуждением генератора постоянного тока | 1952 |
|
SU103048A1 |
