S
(Л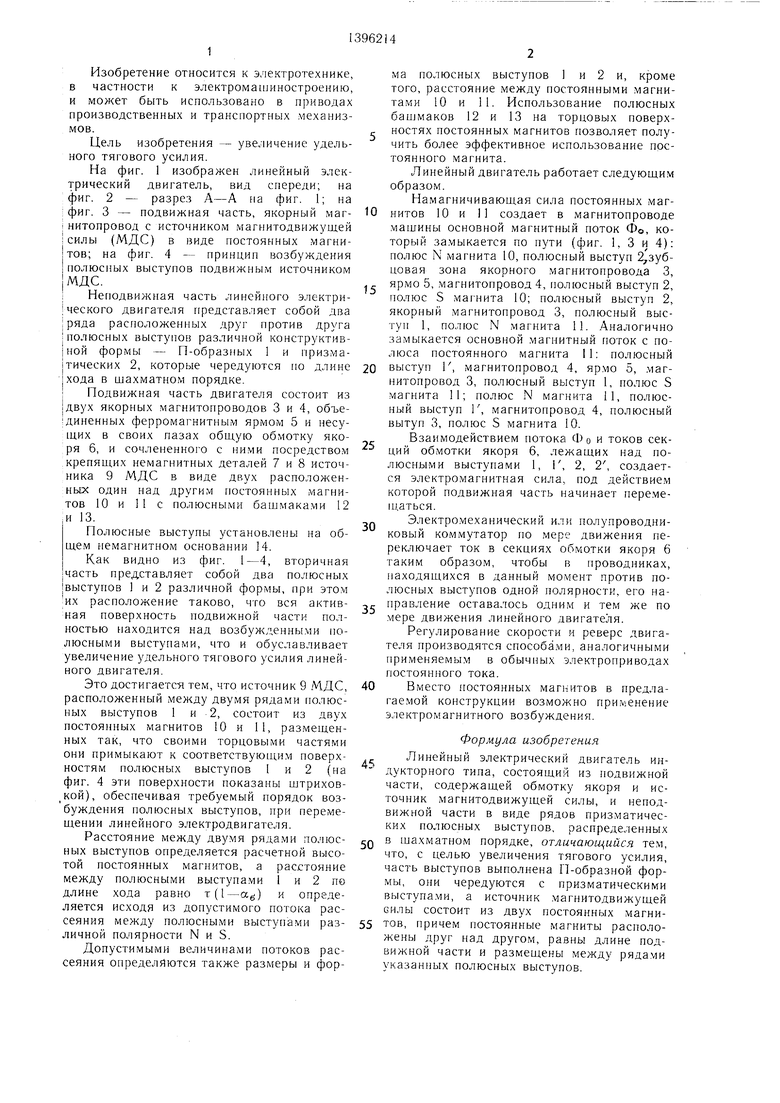
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный электродвигатель | 1985 |
|
SU1339794A1 |
| Линейный двигатель постоянного тока | 1987 |
|
SU1580498A1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2185018C2 |
| Магнитоэлектрический линейный двигатель | 1987 |
|
SU1582295A1 |
| Линейный электродвигатель постоянного тока | 1987 |
|
SU1504748A1 |
| Линейный двигатель постоянного тока | 1983 |
|
SU1136269A1 |
| Линейный электрический двигатель постоянного тока | 1984 |
|
SU1261061A1 |
| Электропривод | 1990 |
|
SU1823095A1 |
| Линейный электрический двигатель постоянного тока | 1986 |
|
SU1367110A1 |
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С ДИСКОВЫМ РОТОРОМ | 2004 |
|
RU2319279C2 |

Изобретение относится к электротехнике и может быть использовано в приводах транспортных механизмов. Целью изобретения является увеличение тягового усилия. Электродвигатель, содержит неподвижную часть, состоящую из двух рядов чередующихся щах.матообразно расположенных призматических и П-образных по- дюсных выступов 1 и 2. Подвижная часть содержит два якорных магнитопровода 3 и 4 с обмоткой якоря 6 и источником магнитодвижущей силы, расположенных между полюсными выступами. Взаимодействие основного магнитного потока и токов обмотки якоря обеспечивает возникновение электромагнитной силы, под действием которой подвижная часть перемещается. Положительный эффект достигается более полным использованием активной поверхности магнитопроводов якоря. 4 ил.
7 // /.
.1 / iz //
Фиг.1
оо со
О5 ND
1
Изобретение относится к электротехнике, в частности к электромашиностроению, и может быть использовано в приводах производственных и транспортных механизмов.
Цель изобретения - увеличение удельного тягового усилия.
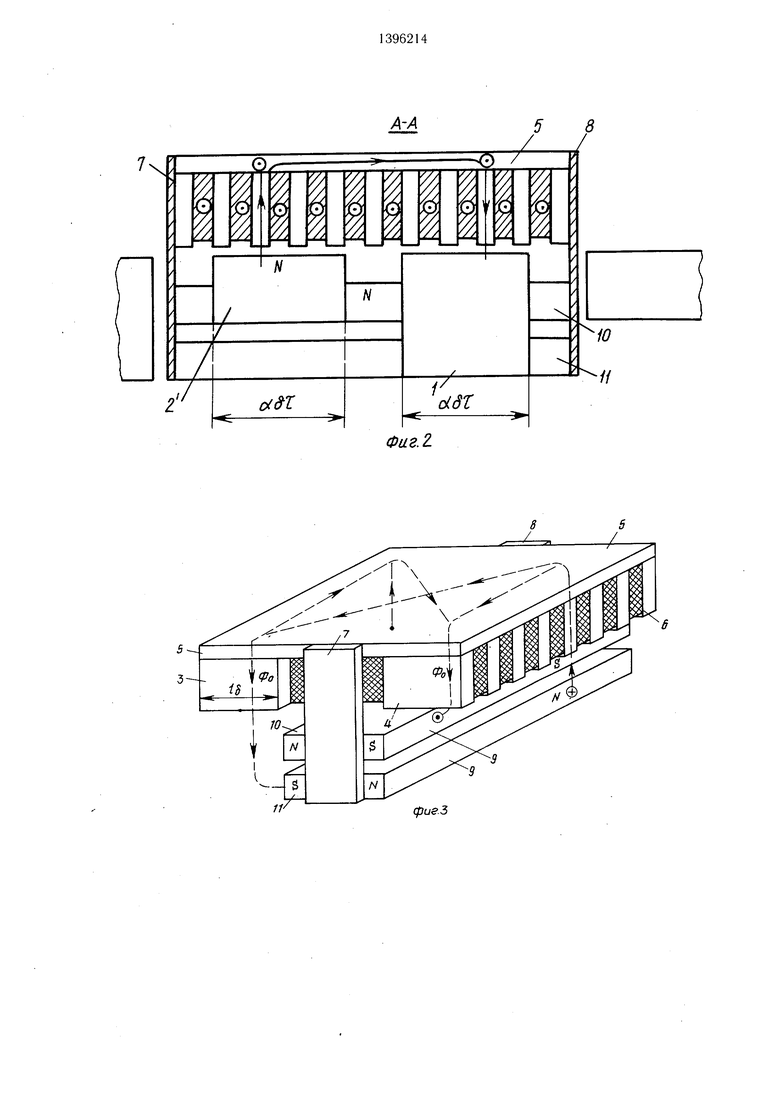
На фиг. 1 изображен линейный электрический двигатель, вид спереди; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - подвижная часть, якорный маг- нитопровод с источником магнитодвижущей силы (МДС) в виде постоянных магнитов; на фиг. 4 - принцип возбуждения полюсных выступов подвижным источником МДС.
Неподвижная часть линейного электрического двигателя представляет собой два ряда расположенных друг против друга полюсных выступов различной конструктивной формы - П-образных 1 и призматических 2, которые чередуются но длине хода в шахматном порядке.
Подвижная часть двигателя состоит из двух якорных магнитопроводов 3 и 4, объединенных ферромагнитным ярмом 5 и несущих в своих пазах обндую обмотку якоря 6, и сочлененного с ними посредством крепящих немагнитных деталей 7 и 8 источника 9 МДС в виде двух расположенных один над другим постоянных магнитов 10 и 11 с полюсными башмаками 12 и 13.
Полюсные выступы установлены на общем немагнитном основании 14.
Как видно из фиг. 1-4, вторичная часть представляет собой два полюсных выступов 1 и 2 различной формы, при этом их расположение таково, что вся активная поверхность подвижной части полностью находится над возбужденными полюсными выступами, что и обуславливает увеличение уд.ельного тягового усилия линейного двигателя.
Это достигается тем, что источник 9 МДС, расположенный между двумя рядами полюсных выступов 1 и 2, состоит из двух постоянных магнитов 10 и 11, размещенных так, что своими торцовыми частями они примыкают к соответствующим поверхностям полюсных выступов 1 и 2 (на фиг. 4 эти поверхности показаны штриховкой), обеспечивая требуемый порядок возбуждения полюсных выступов, при перемещении линейного электродвигателя.
Расстояние между двумя рядами полюсных выступов определяется расчетной высотой постоянных магнитов, а расстояние между полюсными выступами 1 и 2 по длине хода равно т() и определяется исходя из допустимого потока рассеяния ме.жду полюсными выступами различной полярности N и S.
Допустимыми величинами потоков рассеяния определяются также размеры и фор5
5
ма полюсных выступов 1 и 2 и, кроме того, расстояние между постоянными магнитами 10 и 11. Использование полюсных башмаков 12 и 13 на торцовых поверх- ностях постоянных магнитов позволяет получить более эффективное использование постоянного магнита.
Линейный двигатель работает следующим образом.
Намагничивающая сила постоянных маг- 0 нитов 10 и 11 создает в магнитопроводе мащиньЕ основной магнитный поток Фо, который замыкается по пути (фиг. 1, 3 и 4): полюс N магнита 10, полюсный выступ 2руб- цовая зона якорного .магнитопровода 3, ярмо 5, магнитопровод 4, полюсный выступ 2, полюс S магнита 10; полюсный выступ 2, якорный магнитопровод 3, полюсный выступ 1, полюс N магнита 11. Аналогично замыкается основной магнитный ноток с полюса постоянного магнита 11: полюсный 0 выступ Г, магнитопровод 4, яр.мо 5, .магнитопровод 3, полюсный выступ 1, полюс S магнита 11; полюс N магнита 11, полюсный выступ Г, магнитопровод 4, полюсный вытуп 3, полюс S магнита 10.
Взаимодействием ютока Фо и токов секций обмотки якоря 6, лежащих над полюсными выступами 1, Г, 2, 2, создается электромагнитная сила, под действием которой подвижная часть начинает пере.ме- щаться.
Электро.механический или полупроводниковый коммутатор по мере движения переключает ток в секциях обмотки якоря 6 таким образом, чтобы в проводниках, находящихся в данный момент против полюсных выступов одной полярности, его направление оставалось одним и тем же по мере движения линейного двигателя.
Регулирование скорости и реверс двигателя производятся способами, аналогичными применяемым в обычных электроприводах постоянного тока.
0 Вместо постоянных магнитов в предлагаемой конструкции возможно применение электромагнитного возбуждения.
Формула изобретения
Линейный электрический двигатель индукторного типа, состоящий из подвижной части, содержащей обмотку якоря и источник магнитодвижущей силы, и неподвижной части в виде рядов призматических полюсных выступов, распределенных
Q в шахматном порядке, отличающийся тем, что, с целью увеличения тягового усилия, часть выступов выполнена П-образной формы, они чередуются с призматическими выступа.ми, а источник магнитодвижущей силы состоит из двух постоянных магни5 тов, причем постоянные магниты расположены друг над другом, равны длине подвижной части и размещены между рядами указанных полюсных выступов.
0
5
5
5- 3АгА
/
8
/
Фае. 2.
срие.З
фигЛ
| Линейный электрический двигатель постоянного тока | 1984 |
|
SU1261061A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
