Изобретение относится к механизированному инструменту для сборки резьбовых соединений.
Цель изобретения - повышение точности затяжки за счет корректировки жесткости элементов гайковерта в зависимости от жесткости резьбового соединения.
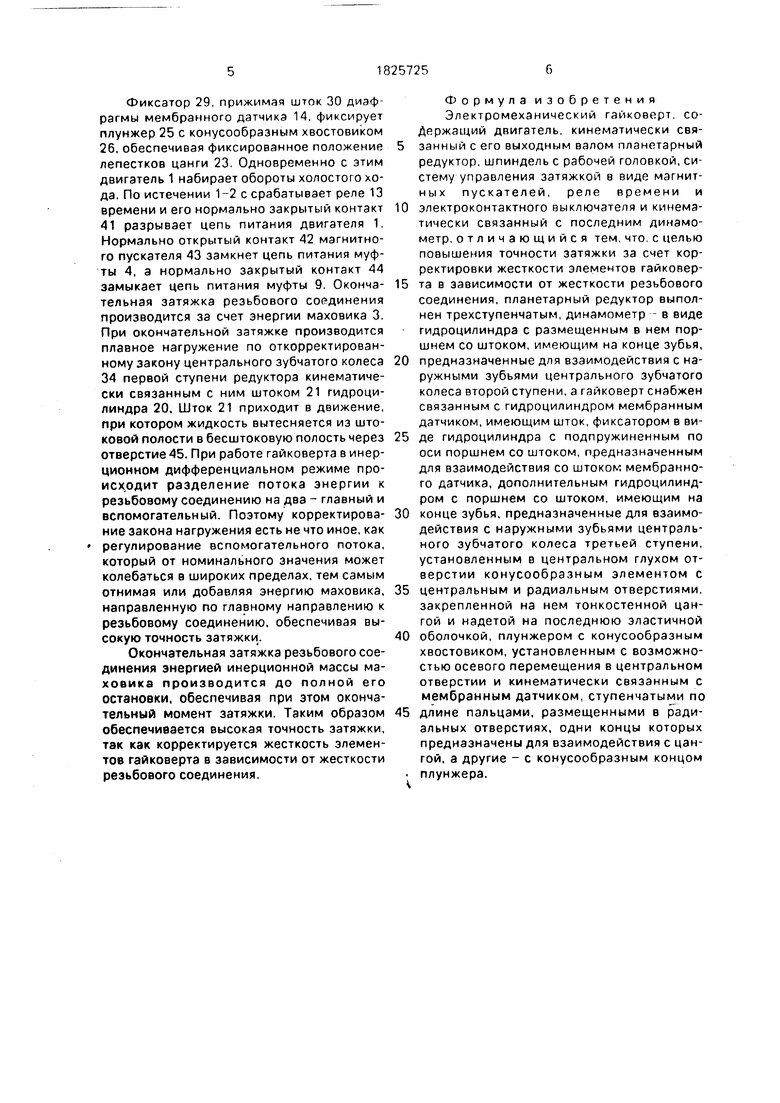
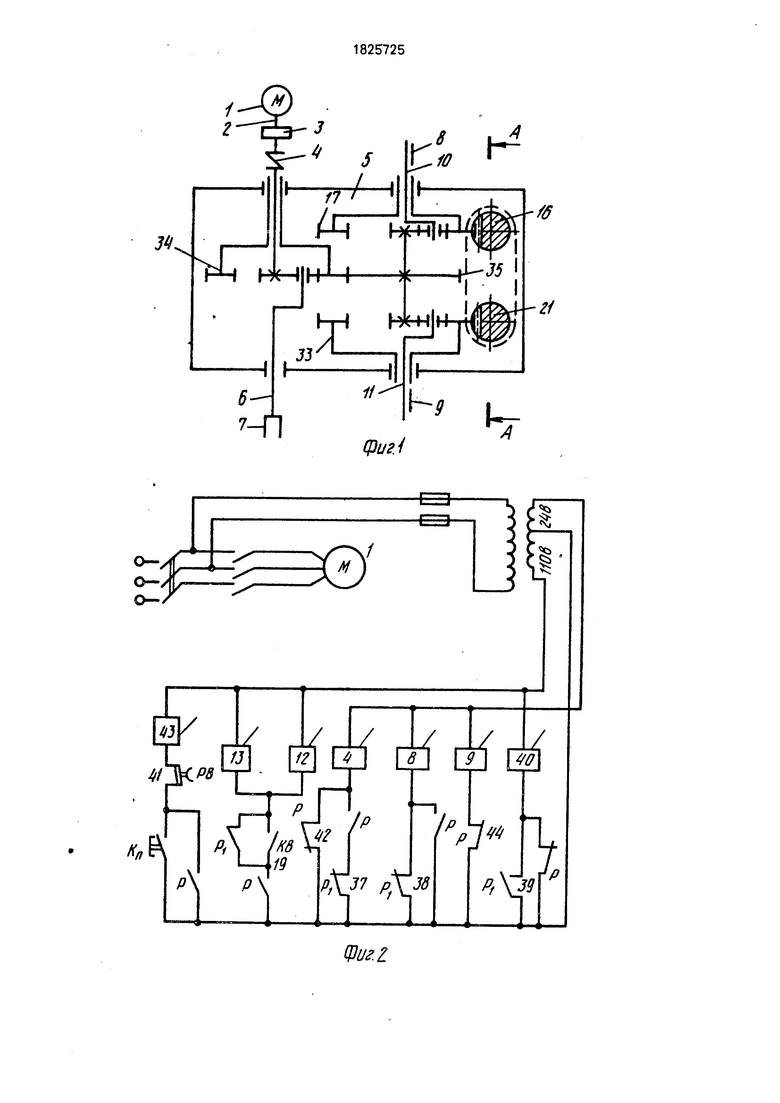
На ,1 изображена кинематическая схема электромеханического гайковерта; на фиг.2 - блок-схема системы управления; на фиг.З - механизм нагружения и корректирующий механизм, разрез; на фиг.4 - то же, в момент окончания предварительной затяжки.
Эгектромеханунескийгайковерт содержит двигатель 1, на выходном валу 2 которого установлен маховик 3 и электромагнитная муфта 4, соединяющая двигатель 2 с трехступенчатым планетарным редуктором 5, шпиндель 6 с рабочей головкой 7, электромагнитные муфты 8 и 9, одна из которых установлена на водиле 10 второй ступени, а другая - на водиле 11 третьей ступени редуктора, связанную с ними систему управления затяжкой, включающую магнитный пускатель 12 и реле 13 аремени, мембранный датчик 14, динамометр в виде гидроцилиндра 15, зубчатый шток 16 котооого предназначен для взаимодействия с наружными зубьями 17 центрального зубчатого колеса второй ступени редуктора, кулачок 18, установленный на штоке 16 и предназначенный для взаимодействия с электроконтактным выключателем 19. Гайковерт снабжен дополнительным гидроцилиндром 20 с полым зубчатым штоком 21, внутри которого коаксиально установлены полый конусообразный элемент 22 с закрепленной на нем тонкостенной цангой 23, поверх которой одета эластичная оболочка 24, внутри конусообразного элемента 22 установлен с возможностью осевого перемещения плунжер 25 с конусообразным хвостовиком 26, кинематически связанный с мембранным датчиком 14, предназначенным для взаимодействия со ступенчатыми по длине пальцами 27, установленными в радиальные о(верстия 28 конусообразного элемента 22. Каждый палец одним концом контактирует с соответствующим лепестком цанги 23, а другим с конусообразным хвостовиком 26 плунжера 25.
Гайковерт снабжен фикса юром 29, предназначенным для взаимодействия со штоком 30 мембранного да 1 -ича 14 и выполненным в виде гидроциг.индра 31 с подпружиненным по оси поршнем 32 со штоком. Зубчатый шток 21 дополнительного гидроцилиндра 20 предназначен для взаимодействия с наружными зубьями центрального зубчатого колеса 33 третьей ступени редуктора.
Гайковерт работает следующим образом.
Рабочая головка 7 шпинделя б устанавливается на резьбовое соединение (на чертеже не показано) после чего включается кнопка ПУСК, Происходит запуск двигателя
1, электромагнитная муфта 9 в этом случае выключена, а электромагнитные муфты 5 и 8 включены. Центральное зубчатое колесо 34 первой ступени редуктора удерживается от поворота центральным зубчатым колесом
35 второй ступени редуктора, кинематически связанным с зубчатым штоком 16 гидро- Цилиндра 15, и крутящий момент передается на резьбовое соединение до 30% от номинального момента затяжки. В
процессе предварительной затяжки производится плавное нагружение центрального зубчатого колеса 34 первой ступени кинематически связанным с ней гидроцилиндром 15 за счет реактивного момента на шпинделе 6. Шток 16 гидроцилиндра 15 приходит в движение, жидкость из штоковой полости гидроцилиндра 15 по гидроканалу 36 вытесняется в поршневую полость, воздействуя при этом на мембранный датчик 14 за счет
скоростного напооа жидкости. Мембранный датчик 14, прогибаясь, своим штоком 30 кинематически воздействует на плунжер 25 с конусообразным хвостовиком 26, который приходит в движение. При этом хвостовик
26 воздействует на ступенчатые пальцы 27, которые сдвигаясь в радиальном направлении в отверстиях 28 конусообразного элемента 22, способствуют сжатию или разжатию лепестков цанги 23. Так как прогиб диафрагмы мембранного датчика 14 полностью определяется жесткостью резьбового соединения, то и прогиб лепестков цанги 23 будет эквивалентен ей. Тем самым производится корректировка жесткости
элементов гайковерта в зависимости от жесткости конкретного резьбового соединения для последующей окончательной затяжки. В конце хода зубчатого штока 16 гидроцилиндра 15 производится взаимодействие его кулачка 18 с электроконтактным выключателем 19. сигнал с которого поступает на включение магнитного пускателя 12 и реле 13 времени. Нормально закрытый контакт 37 магнитного пускателя 12
разрывает цепь питания электромагнитной муфты 4, нормально закрытый контакт 38 разрывает цепь питания электромагнитной муфты 6, а нормально открытый контакт 39 включает электромагнит 40 фиксатора 29.
Фиксатор 29, прижимая шток 30 диафрагмы мембранного датчика 14. фиксирует плунжер 25 с конусообразным хвостовиком 26, обеспечивая фиксированное положение лепестков цанги 23. Одновременно с этим двигатель 1 набирает обороты холостого хода. По истечении 1-2 с срабатывает реле 13 времени и его нормально закрытый контакт 41 разрывает цепь питания двигателя 1. Нормально открытый контакт 42 магнитного пускателя 43 замкнет цепь питания муфты 4, а нормально закрытый контакт 44 замыкает цепь питания муфты 9. Окончательная затяжка резьбового сординения производится за счет энергии маховика 3. При окончательной затяжке производится плавное нагружение по откорректированному закону центрального зубчатого колеса 34 первой ступени редуктора кинематически связанным с ним штоком 21 гидроцилиндра 20. Шток 21 приходит в движение, при котором жидкость вытесняется из што- ковой полости в бесштоковую полость через отверстие 45. При работе гайковерта в инерционном дифференциальном режиме происходит разделение потока энергии к резьбовому соединению на два - главный и вспомогательный. Поэтому корректирование закона нагружения есть не что иное, как регулирование вспомогательного потока, который от номинального значения может колебаться в широких пределах, тем самым отнимая или добавляя энергию маховика, направленную по главному направлению к резьбовому соединению, обеспечивая высокую точность затяжки.
Окончательная затяжка резьбового соединения энергией инерционной массы маховика производится до полной его остановки, обеспечивая при этом окончательный момент затяжки. Таким образом обеспечивается высокая точность затяжки, так как корректируется жесткость элементов гайковерта в зависимости от жесткости резьбового соединения.
Формула изобретения Электромеханический гайковерт, содержащий двигатель, кинематически связанный с его выходным валом планетарный редуктор, шпиндель с рабочей головкой, систему управления затяжкой в виде магнитных пускателей, реле времени и
электроконтактного выключателя и кинематически связанный с последним динамометр, отличающийся тем, что с целью повышения точности затяжки за счет корректировки жесткости элементов гайковерта в зависимости от жесткости резьбового соединения, планетарный редуктор выполнен трехступенчатым, динамометр - в виде гидроцилиндра с размещенным в нем поршнем со штоком, имеющим на конце зубья,
предназначенные для взаимодействия с наружными зубьями центрального зубчатого колеса второй ступени,а гайковерт снабжен связанным с гидроцилиндром мембранным датчиком, имеющим шток, фиксатором в виде гидроцилиндра с подпружиненным по оси поршнем со штоком, предназначенным для взаимодействия со штоком мембранного датчика, дополнительным гидроцилиндром с поршнем со штоком, имеющим на
конце зубья, предназначенные для взаимодействия с наружными зубьями центрального зубчатого колеса третьей ступени, установленным в центральном глухом отверстии конусообразным элементом с
центральным и радиальным отверстиями, закрепленной на нем тонкостенной цангой и надетой на последнюю эластичной
оболочкой, плунжером с конусообразным хвостовиком, установленным с возможностью осевого перемещения в центральном отверстии и кинематически связанным с мембранным датчиком, ступенчатыми по
длине пальцами, размещенными в радиальных отверстиях, одни концы которых предназначены для взаимодействия с цангой, а другие - с конусообразным концом плунжера.
/
z
r
Й7
H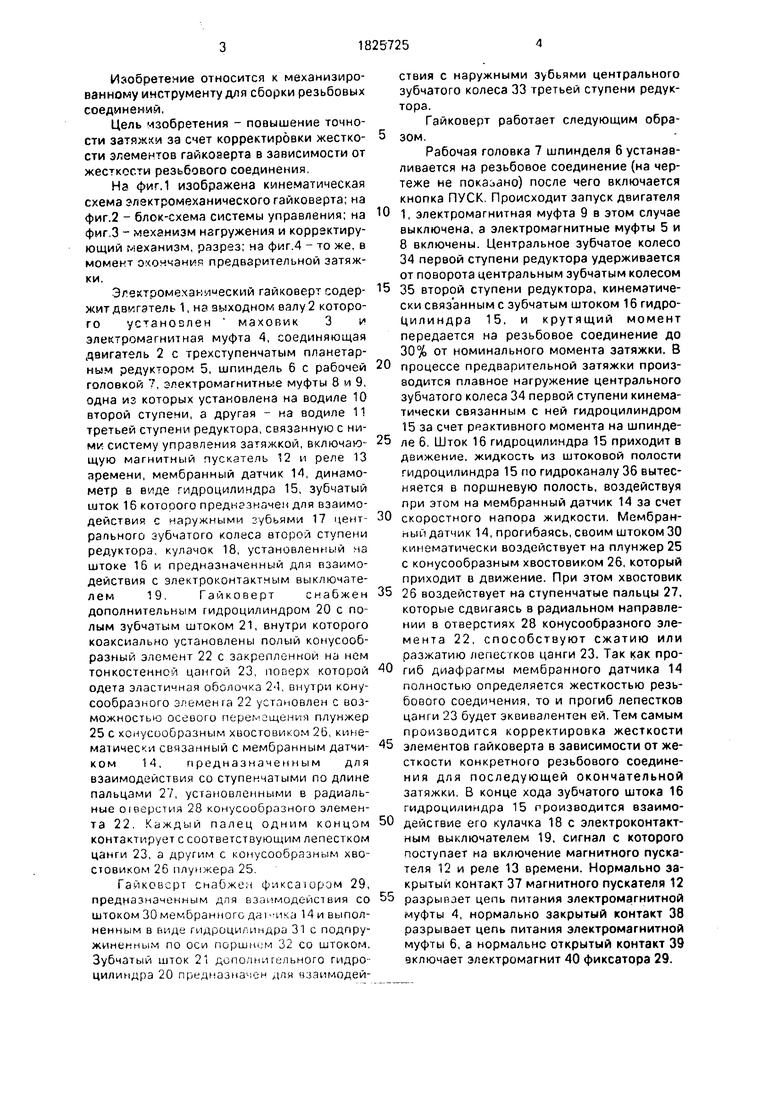
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ЗАТЯЖКОЙ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2037392C1 |
| Электромеханический гайковерт | 1990 |
|
SU1743838A1 |
| Электромеханический гайковерт | 1990 |
|
SU1805024A1 |
| Устройство для сборки резьбовых соединений | 1989 |
|
SU1669703A1 |
| ГАЙКОВЕРТ | 1991 |
|
RU2025268C1 |
| Гайковерт | 1988 |
|
SU1544546A1 |
| ГАЙКОВЕРТ | 2000 |
|
RU2184026C2 |
| Гайковерт | 1985 |
|
SU1305020A1 |
| СПОСОБ РАБОТЫ ГАЙКОВЕРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2582829C1 |
| ГАЙКОВЕРТ | 2011 |
|
RU2473417C1 |
Изобретение относится к механизированному инструменту для сборки резьбовых соединений. Цель изобретения - повышение точности путем корректировки жесткости системы гайковерта в зависимости от жесткости резьбового соединения. В процессе предварительной затяжки произво19 дится плавное нагружение центрального зубчатого колеса первой ступени кинематически связанным с ней гидроцилиндром 15 за счет реактивного момента на шпинделе Шток 16 гидроцилиндра 15 приходит в движение, жидкость по гидроканалу 36 вытесняется в поршневую полость, воздействуя нз мембранный датчик 14, который прогиба ясь штоком 30 кинематически воздействует на плунжер 25 с хвостовиком 26. Последний воздействует на пальцы 27, которые способствуют сжатию или разжатию лепестков цанги 23. Так как прогиб диафрагмы датчика 14 определяется жесткостью резьбового соединения, то и прогиб лепестков цанги 23 будет эквивалентен ей. Тем самым производится корректировка жесткости элементов гайковерта в зависимости от жесткости резьбового соединения для последующей окончательной затяжки. 4 ил. (Л С с ю ел vi го ел
-I
17 I /Ц
iFH HW
f
J3
Г
641
o- o o-
ьЬ
-I
№н
ifi
HJ-J5 I
T- i
I,
tl
Z1
11i
фиг.1
hr
Фм2
21
20
25
ЩигЗ
| Электромеханический гайковерт | 1978 |
|
SU956267A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Электромеханический гайковерт | 1988 |
|
SU1565669A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
