Изобретение относится к устройствам для неразрушающего контроля изделий и может быть использовано в различных отраслях промышленности, в частности в кот- лостроении, например для дефектоскопии труб котлоагрегатов.
Цель изобретения - расширение технологических возможностей устройства путем расширения диапазона контроля, а именно цилиндрических изделий с искривленной продольной осью и разнотолщинностью поверхности.
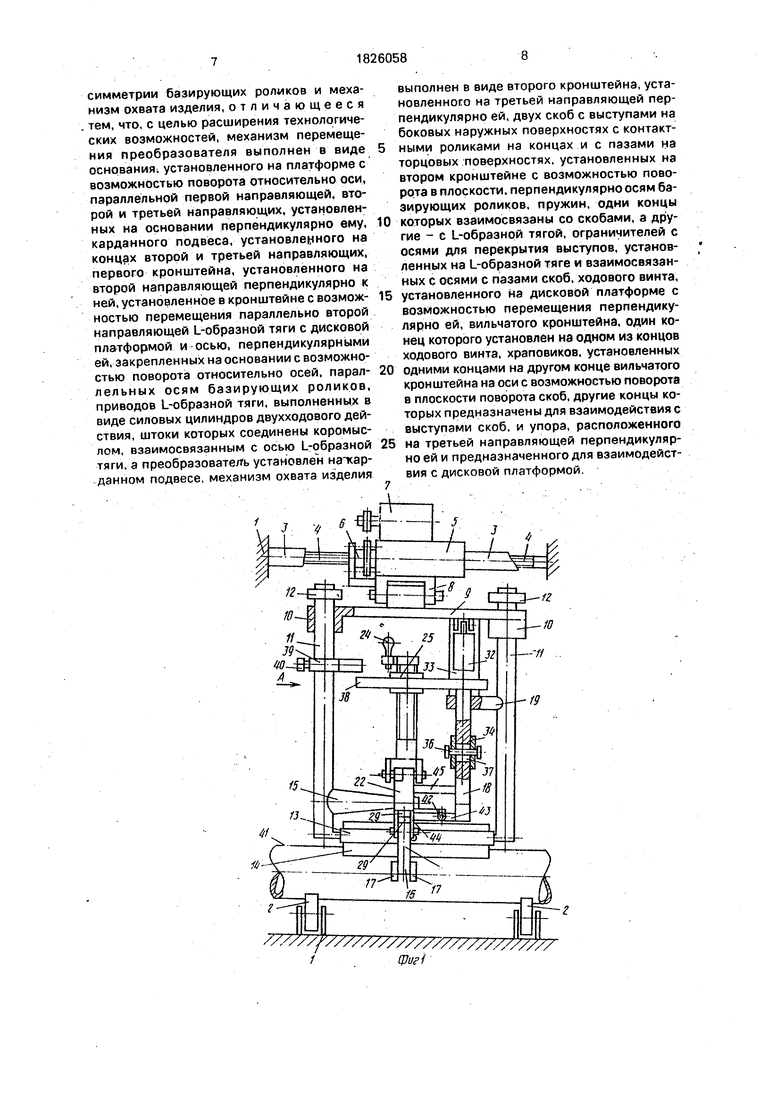
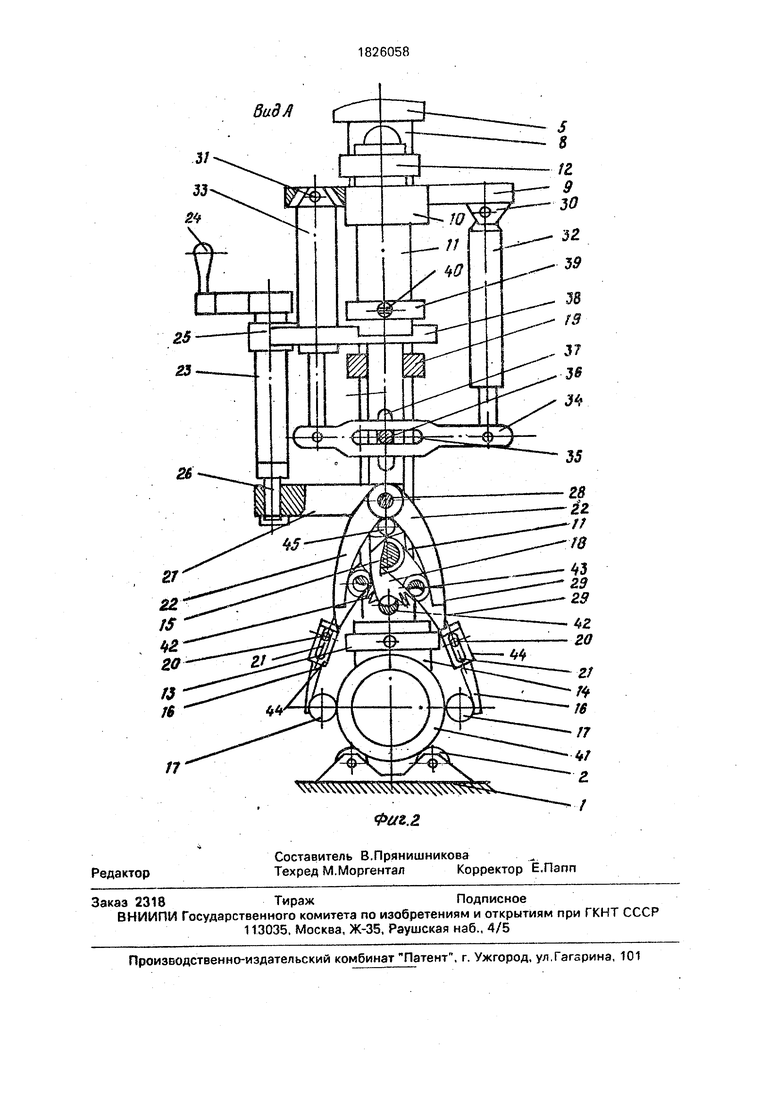
На фиг.1 изображено предлагаемое устройство, вид спереди; на фиг.2 - то же, вид сбоку.
Устройство для контроля цилиндрических изделий содержит станину 1, на которой установлен кантователь изделия в виде вращателя с роликами 2 и сканирующий механизм, направляющие 3 и ходовой винт 4 которого закреплены на станине 1.
Приводная платформа 5 сканирующего механизма установлена на направляющих 3 и снабжена ходовой гайкой 6. привод которой соединен с двигателем 7. На платформе 5 в петлевом шарнире 8 закреплен механизм перемещения и механизм охвата изделия, выполненный в виде основания 9, на котором в гнездах 10 установлены с возможностью перемещения направляющие 11с
00
Ю О О СЛ 00
ограничителями 12, а на противоположных торцах закреплен в кардановом подвесе 13 преобразователь 14, соединенный электрически с дефектоскопической аппаратурой (не показано).
На одной направляющей 11 установлен кронштейн 15, на котором закреплены скобы 16с контактными опорами i7, например, шаровыми. Скобы дополнительно между собой соединены пружинами, противоположные концы которых закреплены на вилке 43 L-образной тяги 18, установленной в отверстии кронштейна 19, выполненном на второй направляющей 11, На кронштейне 15 закреплены скобы 16, которые снабжены фиксирующими осями 20, входящими в пазовые отверстия 21 ограничителей, расположенных на скобах. Храповики 22 связаны с механизмом изменения углового положения, выполненным в виде ходового винта 23 с приводом 24, например, ручным и гайки 25, при этом на торце 26 ходового винта с возможностью-вращения установлен вильчатый кронштейн 27, ось 28 вилки которого является общей осью обоих храповиков -22. Храповики 22 в рабочем положении входят в храповые пазы 29 каждой скобы 16.
Тяга 1,8 снабжена приводом, который выполнен в виде закрепленных каждый в своем петлевом шарнире 30 и 31 силовых цилиндров, например пневмоцилиндров 32 и 33 двухходового действия, штоки которых соединены между собой коромыслом 34, в котором выполнено пазовое отверстие 35 с осью 36, которая при этом установлена в пазовом отверстии 37 тяги 18.
Тяга 18 снабжена дисковой платформой 38, на которой закреплена гайка 25, а направляющая 11 - упором 39 с фиксатором 40. Преобразователь 14 контактирует с изделием 14.
Пружины, которыми соединены скобы 16, имеют позицию 42, консоль L-образной тяги 18 - позицию 43, а ограничители 44, расположенные на скобах 16, соединены между собой на консоли 45 тяги 18.
Устройство работает следующим образом.«
На кантователь-вращатель устанавливают изделие 41, подлежащее контролю. Изделие 41 на роликах 2 приводом (не показан) начинает вращаться. Одновременно с этим в зону контроля сканирующим механизмом подводится преобразователь 14, т.е. платформа 5 с помощью двигателя 7, соединенного передачей с ходовой гайкой 6, начинает перемещаться по направляющим 3 с помощью ходового винта 4, находящегося в постоя ином зацеплении с вращающейся ходовой гайкой 6.
Перемещение преобразователя 14 осуществляется вдоль образующей цилиндрического изделия 41. Как только преобразователь 14 достигнет зоны контроля, вступает в действие закрепленный в петлевом шарнире 8 механизм охвата изделия 41. Предварительно каждый храповик 22 и скобы 16 находятся в поднятом состоянии, преобразователь 14 в карданрвом подвесе 13 не касается поверхности изделия 41, а ограничители 44 на оси 45 перекрывают храповые пазы 29.
Опускание преобразователя 14 на поверхность изделия 41 осуществляется в следующей последовательности. В действие
5 приводятся оба пневмоцилиндра 32 и 33, сжатым воздухом заполняется та полость, которая позволяет с помощью поршня цилиндра выдвигать его шток. Выдвижение каждого штока приводит к опусканию коро0 мысла 34. Свое движение коромысло 34 через ось 36 передает на опускание тяги 18 в отверстии кронштейна 19. Тяга 18, в свою очередь, передает движение вниз направляющим 11, с которыми через карданный под5 вес 13 связан преобразователь 14. Это перемещение осуществляется при контакте дисковой платформы 38 тяги 18с упором 39. зафиксированным фиксатором 40 на направляющей 11 за счет силы тяжести преоб0 разователя.
Одновременно с перемещением направляющих 11 относительно основания 8 перемещаются скобы 16, т.к. они закреплены на кронштейне 15, закрепленном на од5 ной из направляющих 11. Как только преобразователь 14 установится на поверхности контролируемого изделия 41, прекращается движение вниз направляющих 11, которые соединены с преобразователем
0 кардановым подвесом 13, а движение вниз продолжается за счет тяги 18 под действием выдвигающихся штоков цилиндров 32 и 33. В этом случае дисковая платформа начнет опускаться без кольцевых упоров 39.
5 Опускание тяги 18 приведет к перемещению общего зацепления пружин 42 ниже кронштейна 15, а следовательно, к перемещению скоб 16 до контакта их с поверхностью контролируемого изделия 44. Одновременно
0 с этим опускаются ограничители 44, общая ось 45 которых установлена на тяге 18, а вторая - на каждой скобе 16 в эллипсном отверстии 21 на противоположной консоли ограничителя 44; ограничители освобожда5 ют храповые пазы 29 для установки в одном из них на каждой скобе 16 храповика 22. После этого завершается полное выдвижение штоков обоих цилиндров 32 и 33.
Для того чтобы установить в среднем положении ось 36 относительно пазовых отверстий 35 и 37, коромысло 34 устанавливают в исходное (горизонтальное) положение. Для этого выдвинутый шток цилиндра 32 вдвигают в корпус цилиндра, заполняя сжатым воздухом противоположную полость, а из противолежащей - выпускают. В таком положении тяга 18 не будет оказывать влияния на храповики 22, скобы 16 в процессе прецессии продольной оси цилиндрического изделия 41, т.е. когда продольная ось изделия имеет определенный прогиб за счет искривления самого изделия, 8 этом случае механизм фиксации будет совершать колебательные движения в петлевом шар нире 8, а направляющие 11 перемещаться поступательно-возвратно в гнездах 10 основания 9, например, до ограничителей 12. После этих операций преобразователь 14 зафиксирован относительно продольной оси цилиндрического контролируемого из- делия 41. Если при этом храповики 22 в храповых пазах 29 имеют недопустимый люфт, то он устраняется вращением в соответствующую сторону ходового винта 23 относительно гайки 25 с помощью привода 24. В этом случае поступательное движение хо- дорого винта 23 передается на вильчатый кронштейн 27, который снабжен сквозным отверстием, сопряженным с консольной осью (не показано) ходового винта. Перемещение вильчатого кронштейна 27 передается через его ось 28 храповикам 22, противоположные торцы которых заклиниваются в храповых пазах 29.
После этого начинается поиск дефектов (не показано). Приводом 7 через передачу вращения передается на ходовую гайку 6, что приводит к перемещению платформы 5 по направляющим 3 относительно ходового винта 4 вдоль контролируемого изделия 41, а через петлевой шарнир 8 перемещение передается основанию 9 и направляющим 11, на которых в кардановом подвесе 13. перемещается преобразователь 14 относительно вращающегося изделия 41 на роликах 2 станины 1. Ролики вращаются приводом (не показано).
После окончания контроля, когда преобразователь дойдет, например, до противоположного торца изделия 41, вступает в работу опять механизм фиксации изделия 41 вертикального перемещения преобразователя 14. Для этого заполняется сжатым воздухом та полость цилиндра 33, которая с помощью его поршня вдвигает в корпус шток. В этом случае коромысло 34 одной своей консолью начинает подниматься относительно другой своей консоли, шарнирно закрепленной в убранном штоке цилиндра 32. В результате такого подъема (поворота) кооомысла
34, ось 36 начинает перемещаться в пазовом отверстии 35 коромысла 34 и пазовом отверстии 37 тяги 18 до тех пор, пока ось 36 не упрется в верхний торец пазового отверстия 37. В этом случае вместе с убирающимся штоком цилиндра 33 начинает перемещаться тяга 18, увлекая за собой храповики 22, которые общей осью 28 соединены с вильчатым кронштейном 27, сидящем на оси ходового винта 23 механизма ре.упировки храповиков, установленного в гай е 25, закрепленной на дисковом упоре 38 тяги 18. Как только храповики 22 выйдут их храповых пазов 29, а тчга 18 продолжает перемещаться вверх, общее крепление пружин 17 на тяге 18, как только поднимется выше оси 15 скобы 16, под действием сжимающих сил упомянутых пружин 42, итойдут от поверхности изделия 41 и займут положение близкое к горизонтальному. Ограничители 44 перемешаясь относительно осей 20 в пазовых отверстиях 21 с помощью оси 45 на тягах 18 перекроют храповые пазы 29, а тяга 18 под действием разворачивающегося коромысла 34 с помощью убирающегося штока цилиндра 33 начинает дисковой платформой 38 контактировать с кольцевым упором 39 зафиксированною фиксатором 40 . вследствие этого, поднимать напрпвпяющчм 110через карданный подвес 13 преобразователь 14 от поверхности проконтролированного изделия 41, Это происходит до тех пор пока шток цилиндра 33 не войдет в корпус последнего. После этого сканирующее устройство с помощью 1.риводной платформы 5 удаляет механизм фиксации изделия 41 и вертикального перемещения преобразователя 14 из зоны кочтропя. Проконтролируе- мое изделие удаляется с роликов 2, а на его место устанавливается изделие 41, подлежащее контролю и цикл повторяется.
Такое выполне ие устройства позволяет более точно фиксировать относительно продольной оси изделия 41 преобразователь 14 и проводить высококачественный контроль искривленных цилиндрических изделий, при этом отслеживать искривленную продольную ось его, обеспечивая постоянство зазора преобразователя относительно поверхности контроля.
Формула изобретения Устройство для контроля цилиндрических изделий, содержащее станину, установленные на станине базирующие ролики, образующие призмы, первые направляющие, параллельные осям базирующих роликов, платформу, установленную на первой направляющей с возможностью перемещения вдоль них. преобразователь, механизм перемещения преобразователя в плоскости
имметрии базирующих роликов и меха иизм охвата изделия, отличаю щ веся 1М что с целью расширения технологиче- ских возможностей, механизм перемещения преобразователя выполнен в виде основания установленного на платформе с возможностью поворота относительно оси, параллельной первой направляющее корой и третьей направляющих. Установлен ных на основании перпендикулярно ему, карданного подвеса, установленного на концах второй и третьей направляющих, первого кронштейна, установленного на второй направляющей перпендикулярно к ней установленное в кронштейне с возиож ностью перемещения параллельно второй направляющей L-образной тяги с дисковой Формой и осью, перпендикулярными ей закрепленных на основании с возможно- стью поворота относительно осей, парал лельных осям базирующих роликов, приводов L-образной тяги, выполненных в виде силовых цилиндров двухходового действия, штоки которых соединены коромыслом взаимосвязанным с осью L-образной тяги а преобразователь установлен натсар- данном подвесе, механизм охвата изделия
3 4
выполнен в виде второго кронштейна, установленного на третьей направляющей перпендикулярно ей, двух скоб с выступами на боковых наружных поверхностях с контакт- ными роликами на концах и с пазами на торцовых поверхностях, установленных на втором кронштейне с возможностью поворота в плоскости, перпендикулярно осям базирующих роликов, пружин, одни концы 0 которых взаимосвязаны со скобами, а дру- гие - с L-образной тягой, ограничителей с осями для перекрытия выступов, установленных на L-образной тяге и взаимосвязанных с осями с пазами скоб, ходового винта, 5 установленного на дисковой платформе с возможностью перемещения перпендикулярно ей, вильчатого кронштейна, один конец которого установлен на одном из концов ходового винта, храповиков, установленных 0 одними концами на другом конце вильчатого кронштейна на оси с возможностью поворота в плоскости поворота скоб, другие концы которых предназначены для взаимодействия с выступами скоб, и упора, расположенного 25 на третьей направляющей перпендикуляр- но ей и предназначенного для взаимодействия с дисковой платформой 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для печатания ярлыков | 1981 |
|
SU1071455A1 |
| Устройство для ультразвукового контроля изделий | 1986 |
|
SU1415176A1 |
| УСТРОЙСТВО ДЛЯ СЪЕМА ИЗДЕЛИЙ С КОНВЕЙЕРА И ИХ УКЛАДКИ В ТАРУ | 2014 |
|
RU2549319C1 |
| Устройство для укладки изделий в тару | 1982 |
|
SU1154150A1 |
| ЭКСКАВАТОР ДЛЯ ПЛАНИРОВАНИЯ И ЗАСЕВА ОТКОСОВ ОТВАЛА | 1992 |
|
RU2024692C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 1991 |
|
RU2017647C1 |
| Устройство для обработки внутренних поверхностей | 1983 |
|
SU1162574A1 |
| Станок для изготовления из ленточного металла радиаторных пластин со скрученными спирально по перечными полосами | 1933 |
|
SU35797A1 |
| МАШИНА ДЛЯ ШТАМПОВКИ СЕТКИ ИЗ ЛИСТОВОГО МАТЕРИАЛА | 2001 |
|
RU2202428C2 |
| Устройство для выдачи билета и сдачи | 1979 |
|
SU868800A1 |
Изобретение относится к устройствам для неразрушающего контроля изделий и может быть использовано в различных отраслях промышленности, в частности &кот- лостроении, например, при дефектоскопии труб для котлоагрегатов. Цель изобретения ...---расширение технологических возможностей устройства, а именно контроль изделий с искривленной продольной осью или разнотолщинностью поверхности; В устройстве механизм перемещения .(реобразователя выполнен в виде основания, установленного на платформе с возможностью поворота относительно оси, параллельной направляющим, установленным на основании перпендикулярно ему, а также карданного подвеса, L- образной тяги с дисковой платформой и осью, перпендикулярной ей, и приводов L- образной тяги. Механизм охвата изделия включает кронштейны, скобы с выступами на наружных поверхностях, снабженных контактными роликами, пружины, ходовой винт, установленный на дисковой платформе с возможностью перемещения перпендикулярно ей, вильчатый кронштейн, один конец которого установлен на одном из концов ходового винта, храповики, установленные одними концами на другом конце вильчатого кронштейна, и упора, предназначенного для взаимодействия с дисковой платформой. 2 ил. Hrf fe
//////f////////////////////////// 1фиг
ВидА
/7
Фаг.г
| Устройство для ультразвукового контроля изделий | 1980 |
|
SU1043553A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
