(21)4160060/25-28
(22)11.12.86
(46) 07.08.88. Бюл. 29
(71)Научно-производственное объе;:щ-.. нение Атомкотломаш
(72)А.В. Медведев и Л.Б. Бвсикова
(53)620.179.16(088.8)
(56)Авторское cвидeтeJн cтвo СССР « 366405, кл. G 01 N 29/04, 1973.
(54)УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ
(57)Изобретение относится к устройствам для неразрупгакщего контроля изделий и может быть использовано в машиностроении, котлостроении ив других отраслях. Целью изобретения является повышение качества контроля за счет обеспечения возможности контроля краев контролируемого изделия и совмещение при контроле контролируемого изделия и стандартного образца
с типовыми дефектами используемого для настройки ультразвукового преобразователя. Устройство содержит закп
репленные на раме механизмы вращения контролируемого изделия и стандартного образца, размещаемые на общей раме в процессе контроля переходные узтс в виде пластин из упругодеформяру- емого материала с механизмами измет нения кривизны пластин, узел наезда ультразвукового преобразователя в виде конусных роликов и механизм пег ремещения ультразвукового преобразователя. Перед началом контроля плас-, тины переходных узлов с помощью механизмов изменения кривизны изгибаются до кривизны наружной стороны контролируемого и стандартного изделий,ультразвуковой прербразователь устанавливается на стандартном изделии и настраивается вместе с аппаратурой по имеющимся в стандартном изделии типовым дефектам. Затем контролируемое изделие и стандартное изделие начинают вращаться, а ультразвуковой преобразователь перемещается по контролируемому изделию с помощью механизма перемещения. 3 з.п. ф-лы 2 ил.
о S
(Л
Изобретение относится к устройствам для неразрушающего контроля изделий и.может быть использовано для ультразвукового контроля в машиностроении, котлостроении и в других отраслях промышленности.
Целью изобретения является повышение качества контроля за счет снабжения устройства переходными узлами.для размещения между контролируемым изделием и стандартньм изделием с типовыми ( дефектами, а также размещения переходного узла на свободном конце контролируемого изделия. -
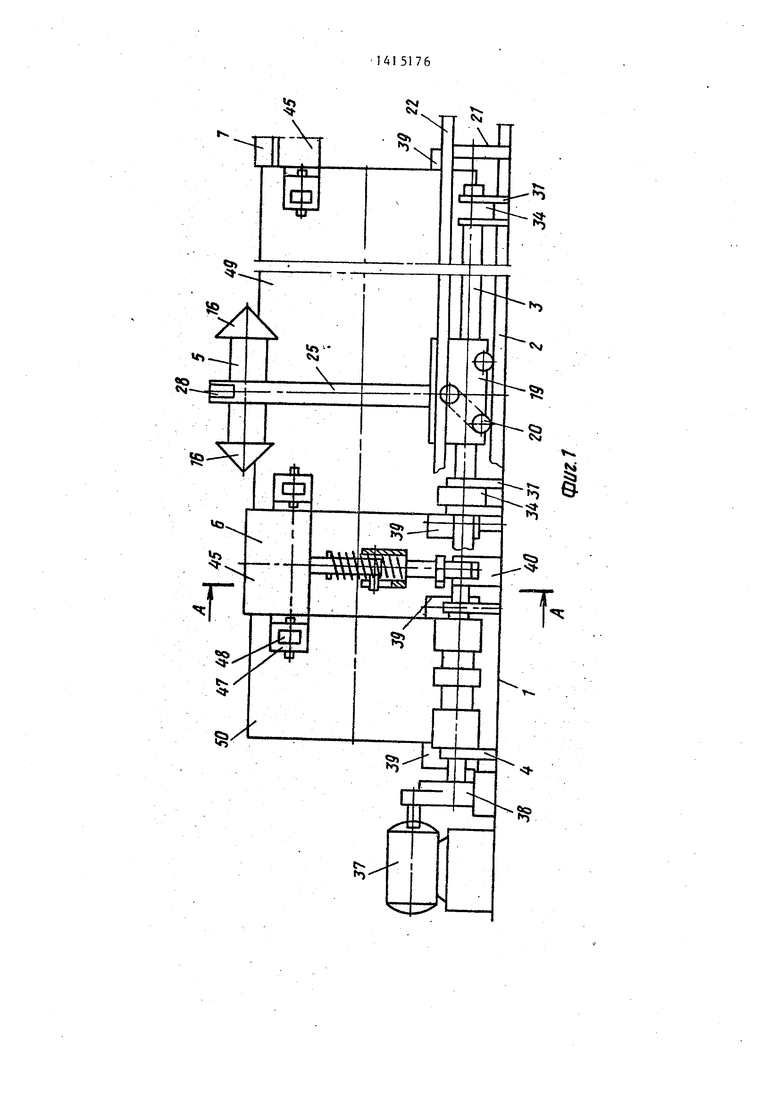
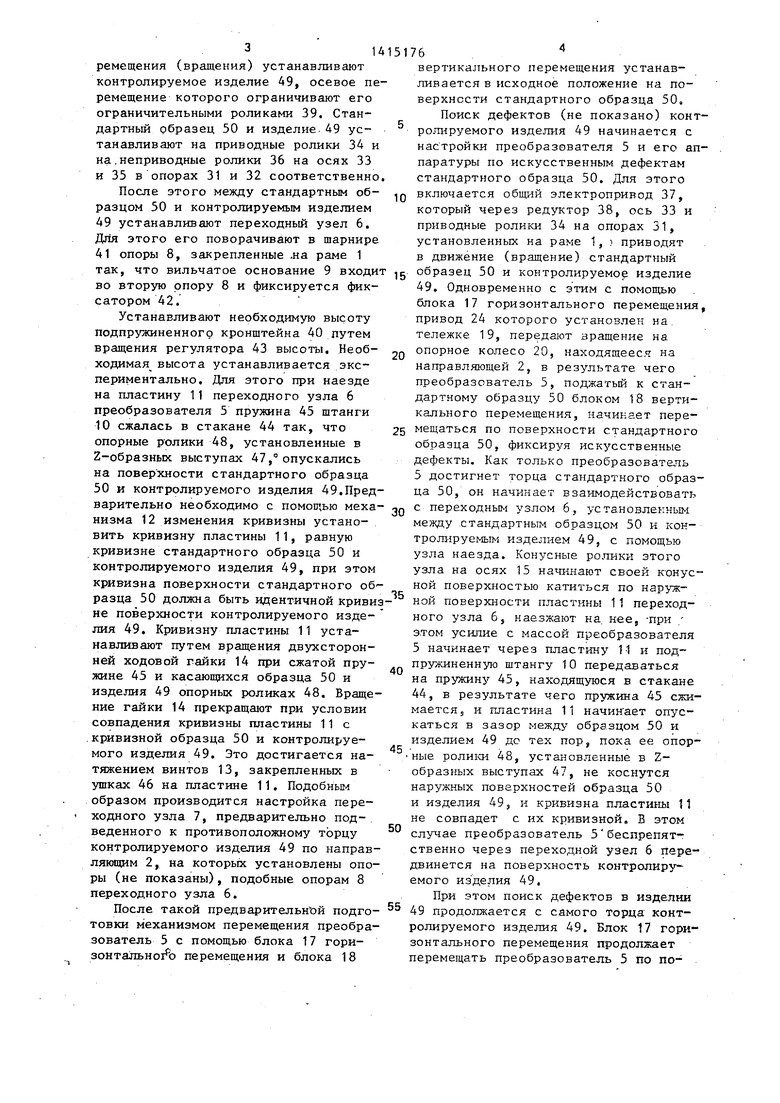
На фиг. 1 дано устройство для ультразвукового контроля изделий, общий вид; иа фиг. 2 - вид А-А на фиг. 1.
Устройство для ультразвукового контроля изделий содержит раму 1,раз- мещенные на ней направляющие 2, независимо установленные на них механизм 3 перемещения (вращения) контролируемого изделия, механизм 4 перемещения (вращения) стандартного образца С типовыми дефектами, ультразвуковой преобразователь 5, соединенный с де- фектоскопом (не показан), механизм перемещения ультразвукового преобразователя 5, два переходных узла 6 и 7, один из которых, переходной узел 6, предназначен для размещения между стандартн ым образцом и контролируемым изделием, а второй переходной узел 7 - со свободной стороны контролируемого изделия, и узел наезда ультразвукового преобразователя 5 на переходные узлы 6 и 7,
Каждый переходньй узел 6 и 7 выполнен в виде закрепленных на раме 1 опор 8, соединенного с ними вильчатого основания 9, подвижно установлен ной на нем подпружиненной штанги 10, жестко закрепленной на ней пластины 11 из упругодеформируемого материала и механизма 12 изменения кривизны пластины 11, выполненного в виде двух ходовых винтов 13 и двзоссторонней ходовой гайки 14.
Узел наезда ультразвукового преобразователя 5 вьшолнен в виде консоль.но закрепленных осями 15 на торцах ультразвукового преобразователя 5 конусных роликов 16, оси 15 которых параллельны направляющим 2,
Механизм перемещения ультразвуко- вого преобразователя 5 состоит из блока 17 горизонтального перемещения ультразвукового преобразователя 5 и
д s
0 5 о
0
5
5
0
5
блока 18 вертикального перемещения ультразвукового преобразователя 5, Блок 17 горизонтального перемещения ультразвукового преобразователя 5 состоит из тележки 19, установленной опорными колесами 20 на направляющих 2, жестко закрепленной подставки 21 с выполненным в. нем ограничителем 22, поддерживающего колеса 23 и привода 24 опорных колес 20.
Блок 18 вертикального перемещения ультразвукового преобразователя 5 состоит из закрепленного на тележке 1 9 кронштейна 25, пневмогидроци- линдра 26, держателя 27, соединенного с кронштейном 25 с помощью шарнира 28, цилиндра 29 и штока 30,сое- - диняющего держатель 27 с кронштей- . ном 25.
Механизм 3 перемещения (вращения) контролируемого изделия выполнен в виде закрепленных на. раме 1 опор 31 и 32, закрепленного на опоре 31 с помощью оси 33 приводного ролика 34, закрепленного на опоре 32 с помощью оси 35 неприводного ролика 36.
Механизм 4 перемещения (враш;ения) стандартного образца содержит электропривод 37 с редуктором 38, передаю- шие вращение на приводной ролик 25, Кроме того, устройство для ультразвукового контроля изделий содержит ограничительные ролики 39, подпружиненньй кронштейн 40, шарниры 41 для соединения вильчатого основания 9 с опорами 8, фиксатора 42 шарниров 41, регулятора 43 высоты подъема переходных узлов 6, соединенные с ними стаканы 44 с пружинами 45, ушки 46 соединения двухстороннего ходового винта 13с пластиной 11 из упругодеформируемог о материала, Z-образные выступы 47 и опорные рамы 48.
Позицией 49 обозначено контролируемое изделие, позицией 50 - стандартный образец с имеюш;имися в нем типовыми дефектами (не обозначены).
Устройство для ультразвукового контроля изделий работает следующим образом.
Предварительно преобразователь 5 электрически соединяют с дефектоскопической аппаратурой (дефектоскопом) (не показана),на механизм 4 перемещения (вращения) устанавливают стандарт-; ный образец 50, осевое перемещение которого ограничивается ограничительными роликами 39, а на механизм 3 пе314
ремещения (вращения) устанавливают контролируемое изделие 49, осевое перемещение которого ограничивают его ограничительными роликами 39. Стандартный образец 50 и изделие.49 устанавливают на приводные ролики 34 и на.неприводные ролики 36 на осях 33 и 35 в опорах 31 и 32 соответственно
После этого между стандартным об- разцом 50 и контролируемым изделием
49устанавливают переходный узел 6. Для этого его поворачивают в шарнире 41 опоры 8, закрепленные .на раме 1
так, что вильчатое основание 9 входи во вторую опору 8 и фиксируется фиксатором 42.
Устанавливают необходимую высоту подпружиненного кронштейна 40 путем вращения регулятора 43 высоты, Необ- ходимая высота устанавливается экспериментально. Для этого при наезде на пластину 11 переходного узла 6 преобразователя 5 пружина 45 штанги 10 сжалась в стакане 44 так, что опорные ролики 48, установленные в Z-образных выступах 47, опускались на поверхности стандартного образца
50и контролируемого изделия 49.Предварительно необходимо с помощью меха низма 12 изменения кривизны установить кривизну пластины 11, равную кривизне стандартного образца 50 и контролируемого изделия 49, при этом кривизна поверхности стандартного образца 50 должна быть идентичной криви не поверхности контролируемого изделия 49. Кривизну пластины 11 устанавливают путем вращения двухсторонней ходовой гайки 14 при сжатой пружине 45 и касающихся образца 50 и изделия 49 опорных роликах 48. Вращение гайки 14 прекращают при условии совпадения кривизны пластины 11 с
.кривизной образца 50 и контролируемого изделия 49. Это достигается натяжением винтов 13, закрепленных в ушках 46 на пластине 11, Подобным образом производится настройка переходного узла 7, предварительно под
веденного к противоположному торцу контролируемого изделия 49 по направляющим 2, на которых установлены опоры (не показаны), подобные опорам 8 переходного узла 6.
После такой предварительной подго- товки механизмом перемещения преобразователь 5 с помощью блока 17 горизонтальной) перемещения и блока 18
Q
g
п 5
Q
п
0
5
76
вертикального перемещения устанавливается в исходное положение на поверхности стандартного образца 50,
Поиск дефектов (не показано) контролируемого изделия 49 начинается с настройки преобразователя 5 и его аппаратуры по искусственным дефектам стандартного образца 50. Для этого включается общий электропривод 37, который через редуктор 38, ось 33 и приводные ролики 34 на опорах 31, установленных на раме 1, приводят в движение (вращение) стандартный образец 50 и контролируемое изделие 49. Одновременно с этим с помощью блока 17 горизонтального перемещения, привод 24 которого установлен на. тележке 19, передают вращение на опорное колесо 20, находящеес.ч на направляющей 2, в результате чего преобразователь 5, поджатьй к стандартному образцу 50 блоком 18 вертикального перемещения, начинает перемещаться по поверхности стандартного образца 50, фиксируя искусственные дефекты. Как только преобразователь 5 достигнет торца стандартного образца 50, он начинает взаимодействовать с переходным узлом 6, установлекным. между .стандартным образцом 50 и контролируемым изделием 49, с помощью узла наезда. Конусные ролики этого узла на осях 15 начинают своей конусной поверхностью катиться по нарз. ж- ной поверхности пластины 11 переходного узла 6, наезжают на. нее, -при - Э.ТОМ усилие с массой преобразователя 5 начинает через пластину 11 и подпружиненную щтангу 10 передаваться на пружину 45, находящуюся в стакане 44, в результате чего пружина 45 сжимается, и пластина 11 начин ает опускаться в зазор между образцом 50 и изделием 49 дс тех пор, пока ее опорные ролики 48, установленные в Z- образных выступах 47, не коснутся наружных поверхностей образца 50 и изделия 49J и кривизна пластины 11 не совпадет с их кривизной, В этом случае преобразователь 5 беспрепятственно через переходной узел 6 передвинется на поверхность контролируемого изделия 49,
При этом поиск дефектов в изделии 49 продолжается с самого торця контролируемого изделия 49. Блок 17 горизонтального перемещения продолжает перемещать преобразователь 5 по по514151
веригости перемещающегося (вращающе- |гося) контролируеиого изделия 49. Достигнув противоположного .торца иэ- 1делия 49 таким же образом, преобразо- ватель 5 с помощью узла наезда пере- ещается на переходной узел 7, что позволяет проконтролировать полностью зону у торца изделия 49 без поломки преобразователя 5 о торец этого изделия 49.
10
; После этого процесс поиска дефек- froB в контролируемом изделии 49 прек |ращается, и преобразователь 5 отводи |ся от поверхности пластины 11 с по- |мощью блока 18 вертикального переме- |цения. Для этого в цилиндр 26 пода- Ьтся среда (воздух или жидкость) под давлением так, что из цилиндра 29, Закрепленного на кронштейне 25, выдвигается шток 30, и с помощью вращаю цегося держателя 27 в шарнире 28 от поверхности переходного узла 7 поднимается преобразователь блоком 17 горизонтального перемещения при |реверсе привода 24 перемещается в ис Кодное положениеi т.е. в зону стандартного образца 50. После этого переходной узел 7 отводится от тор- да проконтролированного изделия 49, 0. находящийся между стандартным образцом 50 и изделием 49 узел 6 от- йодится из этой зоны после удаления фиксатора 42 из опоры 8 и его враще- Нием в другой опоре Вв. шарнире 41 .
В процессе контроля поддерживающее колесо 23, установленное в ограничителе 22 подставки 21, .используется дпя более устойчивого удержания кронштейна 25 в рабочем положении.
0
„-
25
40
76.6
Формула и. зобретения
1.Устройство для ультразвукового контроля изделий, содержащее раму, размещенные в ней направляющие, под- вилдао установленные на них механизмы перемещения контролируемого изделия и стандартного образца с типовыми дефектами, ультразвуковой преобразователь, соединенный с дефектоскопом, и механизм перемещения ультразвукового преобразователя, отличающее с я тем, что, с целью повышения качества контроля, оно снабжено двумя переходными узлами, один из которых предназначен для размещения между стандартным образцом и контро- лируемьш изделием, а другой - со свободной стороны контролируемого и.зде- лия, и узлом наезда ультразвукового преобразователя на переходные узлы.
2.Устройство по П.1, отличающееся тем, что каждый из двух переходных узлов вьшолнен в виде закрепленных на раме опор, соединенного с ним вильчатого основания, подвижно установленной на нем подпружиненной штанги, жестко закрепленной на ней пластины из упругоде- формируемого материала и механизма изменения кривизны пластины.
3.Устройство по пп. 1 и 2, о т - лич ающе е ся тем, что механизм изменения кривизны пластины выг полнен в виде ходовых винтов и двусторонней ходовой гайки.
4.Устройство по пп. 1-3, отличающееся тем, что.узел наезда ультразвукового преобразователя выполнен в виде коне ОЛЬ но закрепленных осями на торцах ультразвукового преобразователя конусных роликов,оси. которых параллельны направляющим.
v .
16
7
lib
11
ffS
зг
1 J itO 39
Фиг.г
Z8
8
31 г го

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности и устройство для его осуществления | 1989 |
|
SU1777070A1 |
| Устройство для автоматизированного ультразвукового контроля сварного шва | 1989 |
|
SU1663536A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2001 |
|
RU2184372C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| Устройство для ультразвукового контроля цилиндрических изделий | 1987 |
|
SU1587433A1 |
| Устройство для ультразвукового контроля цилиндрических изделий | 1986 |
|
SU1388791A1 |
| УСТАНОВКА ИЗМЕРИТЕЛЬНАЯ УЛЬТРАЗВУКОВАЯ И МЕХАНОАКУСТИЧЕСКИЙ БЛОК ДЛЯ НЕЕ | 2007 |
|
RU2351926C2 |
| Измерительный модуль дефектоскопа и его следящее шасси | 2022 |
|
RU2778492C1 |
| Устройство для неразрушающего контроля изделий | 1986 |
|
SU1388787A1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |