Изобретение относится к области автоматизации производственных процессов, в частности для съема изделий различного назначения и применения, в том числе и продуктов питания с конвейера.
Известны устройства для укладки изделий в тару (патент РФ №2188146, МКИ В65В 5/10), относящиеся к средствам механизированного группового укладывания штучных объектов в тару, например консервных банок.
Недостатком данного устройства являются низкие технологические возможности и малая производительность из-за последовательных движений исполнительных органов.
Наиболее близким по технической сущности является устройство, переносящее конвейеры (кн. Справочник металлиста под ред. Богуславского Б.Л. Т.5, 1978 г., стр.229, 230; рис.18, г), включающее привод, манипуляторы с захватами на каждое изделие и корпус.
Недостатком данного устройства являются низкая технологическая возможность и малая производительность, заключающаяся в том, что данные устройства не позволяют в момент перемещения изменять автоматически расстояние между изделиями и положение изделий, что во многих случаях крайне необходимо при организованной укладке этих изделий в тару.
Технической задачей данного решения является повышение производительности и расширение технологических возможностей устройства, позволяющего вести съем штучных изделий с конвейера в одном положении и расстоянии между изделиями и укладку их в тару в другом менее габаритном (объемном) и более удобном положении с точки зрения экономичной упаковки и хранения.
Достигается это тем, что устройство для съема изделий с конвейера и их укладки в тару, включающее привод, манипуляторы с захватами на каждое изделие, смонтированные в корпусе, дополнительно содержит рейку, ползуны и тяги. В корпусе содержится направляющий паз, а манипуляторы выполнены в виде плоского параллелограммного механизма, состоящего из стержней, шарнирно соединенных осями. Один из стержней выполнен в виде рычага, установленного на одной оси с вертикальным стержнем, ограниченным от поворота вокруг нее. Одним плечом рычаг посредством другой оси взаимодействует с другим вертикальным стержнем. На другом плече рычага установлен ролик. Рычаг крайнего манипулятора установлен на оси шарнирно в корпусе с возможностью поворота, рычаги других манипуляторов установлены на осях, а оси в ползунах, взаимодействующих с направляющим пазом, имеют возможность поворота и перемещения вдоль паза одновременно. Оси поворота рычагов одних манипуляторов связаны с роликами, установленными на рычагах других манипуляторов посредством тяг. Ролики, в свою очередь, взаимодействуют с рейкой, а рейка - с приводом. Захваты выполнены в виде лотков, установленных консольно на двух остальных осях, расположенных на концах вертикальных стержней.
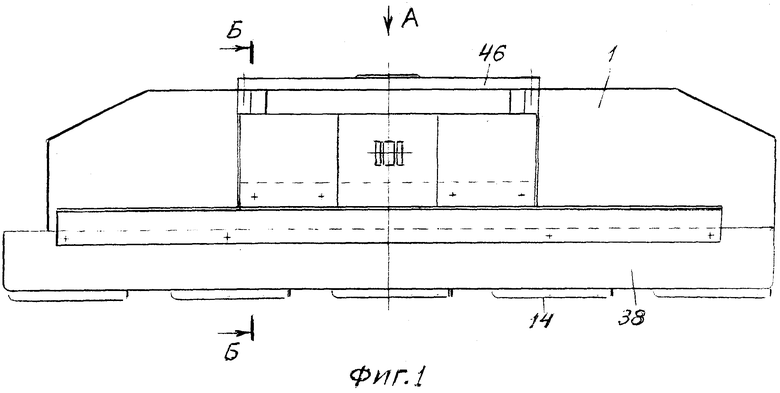
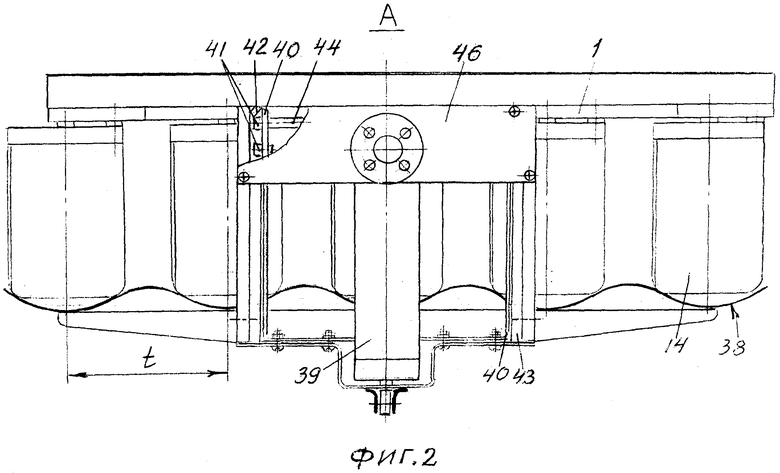
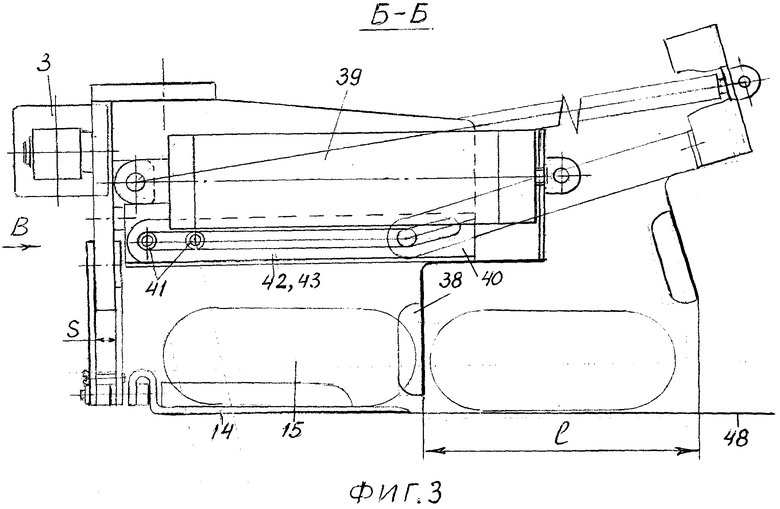
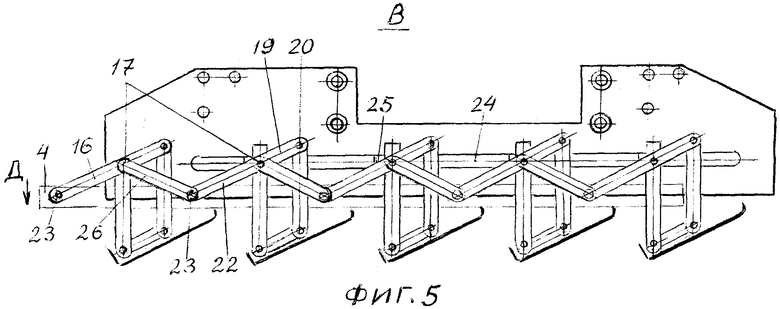
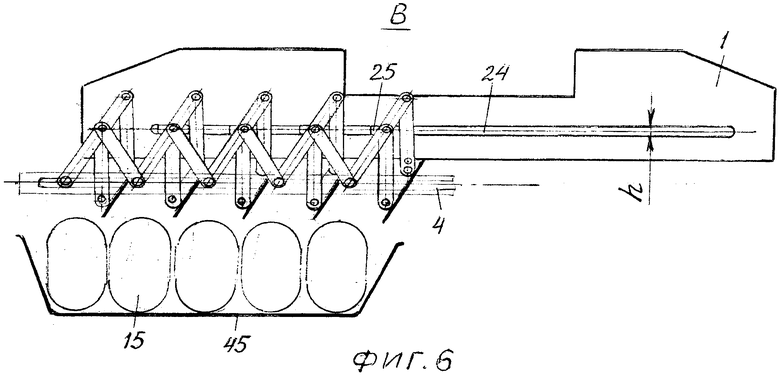
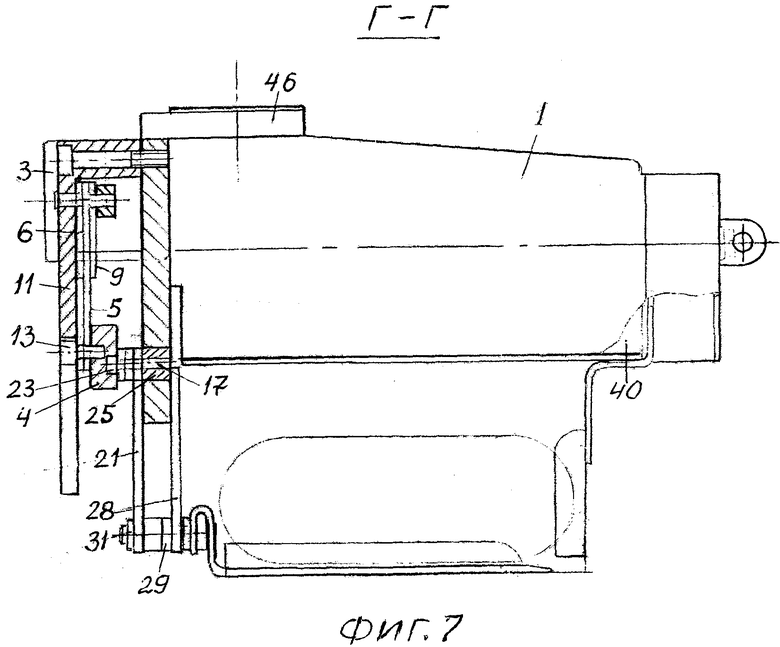
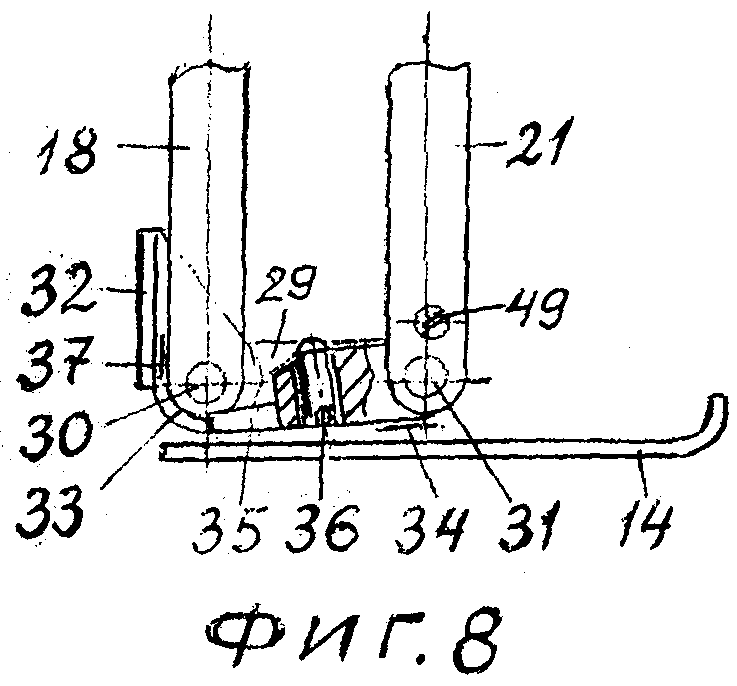
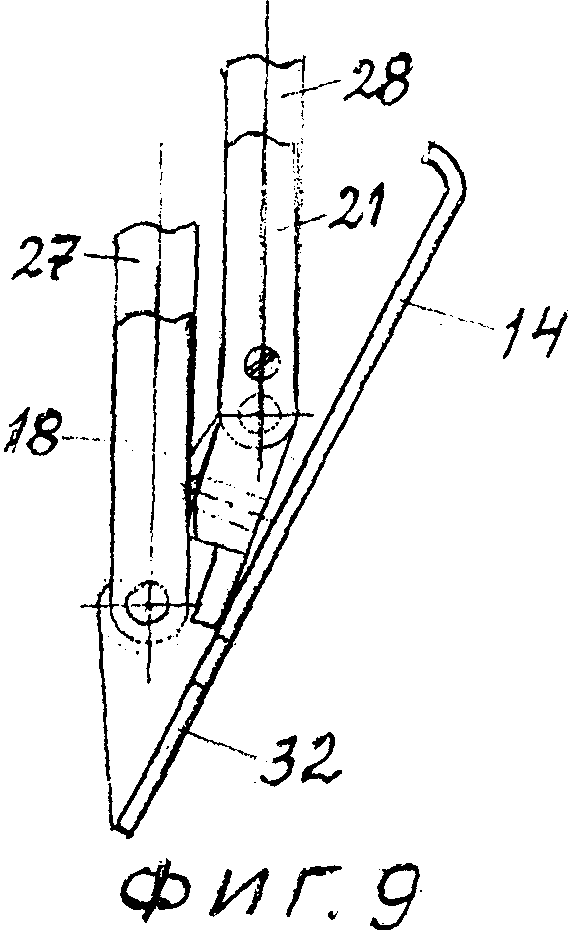
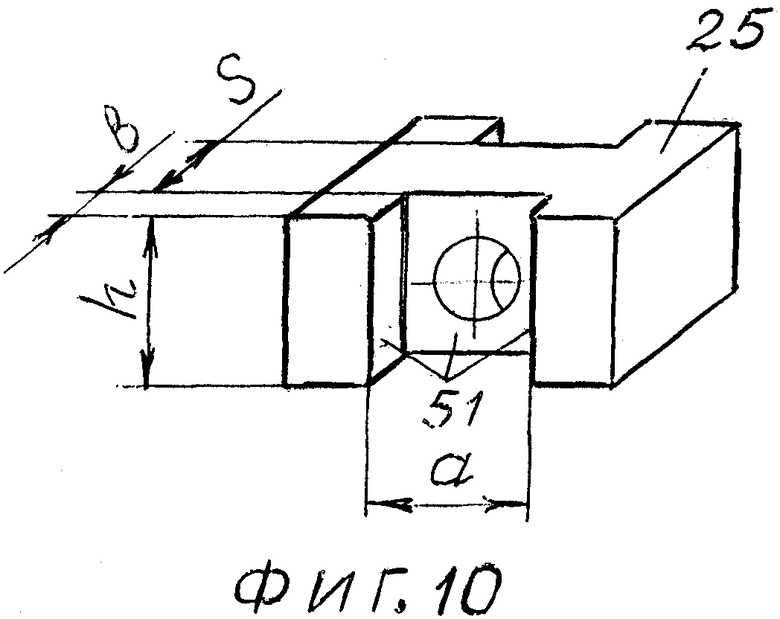
Сущность изобретения поясняется графически, где на фиг.1 представлено устройство - общий вид; на фиг.2 - вид А, фиг.1; на фиг.3 - вид Б, фиг.1; на фиг.4 - вид В (без роликов и тяг), фиг.3; на фиг.5 - вид В (без привода) промежуточное положение устройства; на фиг.6 - вид В (тоже) конечное положение; на фиг.7 - разрез Г-Г, фиг.4; на фиг.8 - лоток в исходном положении; на фиг.9 - лоток в положении разгрузки; на фиг.10 - ползун.
Устройство состоит из корпуса 1, в котором смонтирован привод 2. Привод 2 включает в себя пневмоцилиндр 3 и для создания равномерного перемещения рейки 4 два рычажных механизма. Один состоит из коромысла 5 и шарнирно сопряженного (с помощью оси) с ним стрежня 6. Другой механизм содержит два шарнирно соединенных между собой стержня 7 и 8, аналогичных стержню 6. Между собой эти механизмы соединены так же шарнирно удлиненным стержнем 9. Стержни 6 и 7, в свою очередь, установлены шарнирно на осях в кронштейнах 10 и 11 соответственно. Одно плечо коромысла 5 связано шарнирно со штоком пневмоцилиндра 3, а на другом плече коромысла 5 и стержня 8 установлены пальцы 12 и 13 соответственно. Пальцы 12 и 13 жестко установлены на рейке 4 и взаимодействуют с пазами кронштейнов 10 и 11. В корпусе 1 установлены манипуляторы с захватами, выполненными в виде лотков 14, число которых равно числу изделий 15, которые подлежат съему и упаковке. Манипуляторы выполнены в виде плоского параллелограмного механизма, состоящего так же из стержней, шарнирно соединенных осями. Один из стержней выполнен в виде рычага 16, установленного на одной оси 17 с вертикальным стержнем 18, ограниченным от поворота вокруг нее. Одним плечом 19 рычаг 16, посредством другой оси 20, взаимодействует с другим вертикальным стержнем 21. На другом плече 22 рычага 16 установлен ролик 23, взаимодействующий с пазом рейки 4. Рычаг 16 крайнего манипулятора установлен на оси 17 в корпусе 1 только с возможностью поворота вокруг нее, а рычаги 16 других манипуляторов установлены на осях 17 с возможностью поворота и перемещения вдоль паза 24, выполненного в корпусе 1. Причем эти оси 17 установлены в ползунах 25, перемещающихся по пазу 24 шириной h (фиг.6). Оси 17 поворота рычагов 16 одних манипуляторов связаны с роликами 23, установленными на рычагах 16 других манипуляторов посредством тяг 26. Для повышения изгибной жесткости стержней плоского параллелограмного механизма манипуляторов каждый из них дополнительно содержит по другую сторону стенки корпуса 1, на расстоянии S (ее толщины, фиг.3), стержни 27 и 28, аналогичные вертикальным стержням 18 и 21 соответственно. Нижние части стержней 18, 27, и 21, 28 связаны стержнем 29 шарнирно осями 30 и 31. В определенном случае в качестве стержня 29 может использоваться лоток 14. На осях 30 и 31 установлены консольно лотки 14. Для удержания изделий 15 на лотках 14 в момент перемещения и поворота их совместно с лотками 14 до положения разгрузки служат управляемые от механизма фиксации откидные стенки 32. Механизм фиксации содержит храповик 33 и упругий элемент 34, который поджимает к храповику 33 собачку 35 с регулировочным винтом 36. Стенка 32 с храповиком 33 установлены шарнирно на оси 30 и подпружинены к стержню 18 пружиной 37. Собачка 35 шарнирно установлена на оси 31. Для перемещения изделий 15 с конвейера на лотки 14 служит толкатель 38, взаимодействующий с пневмоцилиндром 39, установленным в корпусе 1 шарнирно с возможностью поворота. Толкатель 38 жестко связан со скобой 40, шарнирно сопряженной со штоком пневмоцилиндра 39. На скобе 40 по обе ее стороны установлены две пары втулок 41. Одна пара втулок 41 взаимодействует с копиром 42, а другая - с копиром 43. Для повышения жесткости скобы 40 она связана стяжкой 44, например, в месте соединения со скобой 40 противоположно установленных втулок 41. Для перемещения устройства от конвейера до места разгрузки изделий 15 в тару 45 может быть использован промышленный робот. С этой целью на корпусе 1 установлен фланец 46 с элементами крепления его к руке робота. Для регулировки перемещения штока пневмоцилиндра 3, а следовательно и рейки 4 служит регулировочный винт 47. Изделия 15 до попадания их на лотки 14 перемещаются по ленте 48 конвейера (фиг.3). С целью исключения поворота вокруг осей 31 вертикальных стержней 28, не связанных осями с рычагами 16, служат винты 49 фиксирующие стержни 28 относительно стержней 21. Таким же образом лишается поворота крайний вертикальный стержень 18, т.е. винтом 50 он соединен жестко с корпусом 1, а остальные стержни 18 (шириной а и толщиной в) установлены в ползунах 25 и лишены поворота с помощью гнезд 51 (фиг.10).
Работает устройство следующим образом. Вначале устройство с помощью робота занимает определенное положение, когда лотки 14 касаются поверхности ленты 48 конвейера, по которому перемещаются изделия 15 рядами в нужном количестве и с необходимым шагом t. При подходе изделий 15 к лоткам 14 в определенном положении включается привод пневмоцилиндр 39 толкателя 38 и изделия 15 принудительно перемещаются на расстояние l (фиг.3) на лотки 14. Далее устройство с изделиями 15 перемещается сначала вверх, например с помощью робота, а затем в зону выгрузки изделий 15. Для этого включается привод 2, т.е. подается рабочая среда (сжатый воздух) в безштоковую полость пневмоцилиндра 3. Шток пневмоцилиндра 3 взаимодействует с плечом коромысла 5, которое посредством стержней 6, 7, 8 и тяги 9 перемещает пальцы 12, 13 по пазам кронштейнов 10 и 11 соответственно. Рейки 4 перемещаются вниз по стрелке Д (фиг.4) параллельно пазу 24. В результате чего происходит взаимодействие паза рейки 4 с роликами 23, которые поворачивают рычаги 16 и тяги 26. Так как ось 17 поворота рычага 16 крайнего манипулятора установлена неподвижно, а другие оси 17 установлены в ползунах 25, то ползуны 25 вместе с осями 17, рычагами 16 и вертикальными стержнями (18, 21, 27, 28) с лотками 14 (т.е. манипуляторы с изделиями 15) начинают перемещаться к первому крайнему лотку, причем лотки 14 еще и поворачиваются вокруг осей 17, все изделия 15 сближаются, разворачиваются и компактно укладываются в тару 45. Причем откидные стенки 32 удерживают изделия 15 от выпадения, пока манипуляторы не займут положение разгрузки, настроенное регулировочным винтом 47. В этом положении регулировочные винты 36 взаимодействуют с вертикальными стержнями 18 и выводят собачки 35 из взаимодействия с храповиками 33. В это время изделия 15, воздействуя собственным весом на стенку 32, поворачивают ее в положение плоскости лотка 14 (фиг.9) и изделия 15 беспрепятственно съезжают с лотков 14. После удаления изделий 15 с лотков 14, стенки 32 и собачки 35 возвращаются в исходное положение за счет пружин 37 и упругих элементов 34 соответственно. Устройство можно отрегулировать также таким образом, чтобы удаление изделий 15 с лотков 14 происходило не одновременно, а например, поочередно слева направо или наоборот, или в любой последовательности, т.е. установить регулировочными винтами 36 очередность расфиксации храповиков 33 собачками 35. Для улучшения работы устройства, в частности перемещения по пазу 24 ползунов 25, в них могут быть дополнительно смонтированы ролики (на фиг. не показаны), взаимодействующие с пазом 24, например, на имеющихся осях 17, выполнив в ползунах 25 под них гнезда. Этим самым снижается сила трения, а следовательно, и нагрузка на рейку 4 при перемещении ползунов 25. Следует отметить, что данное устройство может работать и без робота - автономно. В этом случае устройство устанавливается в конце конвейера и изделия 15, подлежащие упаковке, попадают сразу на лотки 14, и после срабатывания устройства изделия 15 быстро перемещаются и укладываются в определенном положении в тару 45.
Эффективность данного устройства заключается в простоте его конструкции при высокой производительности и дополнительных технологических возможностях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки в тару стержнеобразных предметов | 1982 |
|
SU1076360A1 |
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
| Устройство для укладки изделий в тару | 1982 |
|
SU1154150A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Устройство для вырубки заготовок из листовых материалов | 1977 |
|
SU704814A1 |
| Устройство для вырубки изделий из листового и ленточного материалов | 1978 |
|
SU753670A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Пресс для вырубки изделий излиСТОВОгО и лЕНТОчНОгО МАТЕРиАлА | 1978 |
|
SU795648A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Устройство для контроля и сортировки сердечников | 1980 |
|
SU895552A1 |
Изобретение касается автоматизации производственных процессов. Устройство состоит из корпуса (1), в котором смонтирован привод (2), а также манипуляторы с лотками (14) на каждое изделие. В корпусе имеется направляющий паз. Манипуляторы выполнены в виде плоского параллелограммного механизма, состоящего из стержней, шарнирно соединенных осями. Один из стержней выполнен в виде рычага, установленного на одной оси с вертикальным стержнем (18), ограниченным от поворота вокруг нее. Одним плечом рычаг посредством соответствующей оси взаимодействует с другим вертикальным стержнем. На другом плече рычага установлен ролик, взаимодействующий с пазом рейки (4). Рычаг крайнего манипулятора установлен в корпусе на оси только с возможностью поворота вокруг нее, а рычаги других манипуляторов установлены на осях с возможностью поворота и перемещения вдоль паза. Причем оси рычагов установлены в ползунах, перемещающихся по пазу. При повороте лотков (14) все изделия укладываются в тару. Изобретение обеспечивает повышение производительности и расширение технологических возможностей устройства. 4 з.п. ф-лы, 10 ил.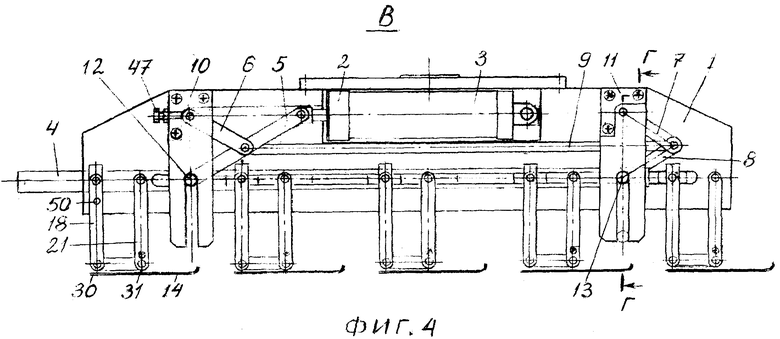
1. Устройство для съема изделий с конвейера и их укладки в тару, включающее привод, манипуляторы с захватами на каждое изделие и корпус, отличающееся тем, что дополнительно содержит рейку, а также ползуны и тяги, число которых на один меньше, чем манипуляторов, в корпусе содержится направляющий паз, манипуляторы выполнены в виде плоского параллелограммного механизма, состоящего из стержней, шарнирно соединенных осями, один из стержней выполнен в виде рычага, установленного на одной оси с вертикальным стержнем, ограниченным от поворота вокруг нее, одним плечом рычаг посредством другой оси взаимодействует с другим вертикальным стержнем, на другом плече рычага установлен ролик, захваты выполнены в виде лотков, посаженных консольно на двух остальных осях механизма, расположенных на концах вертикальных стержней, рычаг крайнего манипулятора установлен на оси шарнирно в корпусе с возможностью поворота, рычаги других манипуляторов установлены на осях, а оси в ползунах, взаимодействующих с направляющим пазом, имеют возможность поворота и перемещения вдоль паза одновременно, причем оси поворота рычагов одних манипуляторов связаны с роликами, установленными на рычагах других манипуляторов посредством тяг, ролики, в свою очередь, взаимодействуют с рейкой, а рейка - с приводом.
2. Устройство по п. 1, отличающееся тем, что содержит толкатель для перемещения изделий на лоток, привод толкателя, копиры и скобу, по обе стороны которой установлены втулки, причем толкатель жестко связан со скобой, шарнирно сопряженный со штоком привода, а втулки взаимодействуют с копирами.
3. Устройство по п. 1, отличающееся тем, что лотки содержат откидную стенку с жестко закрепленным на ней храповиком, пружину, собачку и упругий элемент, причем стенка с храповиком установлена шарнирно на одной из осей, на которой установлен лоток, и подпружинена к одному из стержней пружиной, а собачка шарнирно установлена на другой оси.
4. Устройство по п. 1, отличающееся тем, что дополнительно содержит плоский параллелограммный механизм, расположенный по другую сторону корпуса.
5. Устройство по п. 1, отличающееся тем, что в качестве одного из стержней плоского параллелограммного механизма может быть использован лоток, установленный на двух осях.
| СПРАВОЧНИК МЕТАЛЛИСТА ПОД РЕД | |||
| БОГУСЛАВСКОГО Б.Л., Т.5, 1978 Г., С.С229-230, РИС | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ | 1998 |
|
RU2151087C1 |
| СИСТЕМА ЗАГРУЗКИ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕР | 2008 |
|
RU2381166C2 |
| Способ изготовления фарфоровых трубок с нарезкой на поверхности | 1947 |
|
SU75014A1 |
| US 6438925 B1, 27.08.2002 | |||
| US 2005034424 A1, 17.02.2005. | |||

