Изобретение относится к импульсной технике и может быть использовано в радиотехнических устройствах различного назначения, в том числе в электроизмерительной технике, в телевизионных системах определения параметров объектов и устройствах Определения образов.
Цель изобретения -увеличение помехозащищенности измерителя положения и длительности импульса.
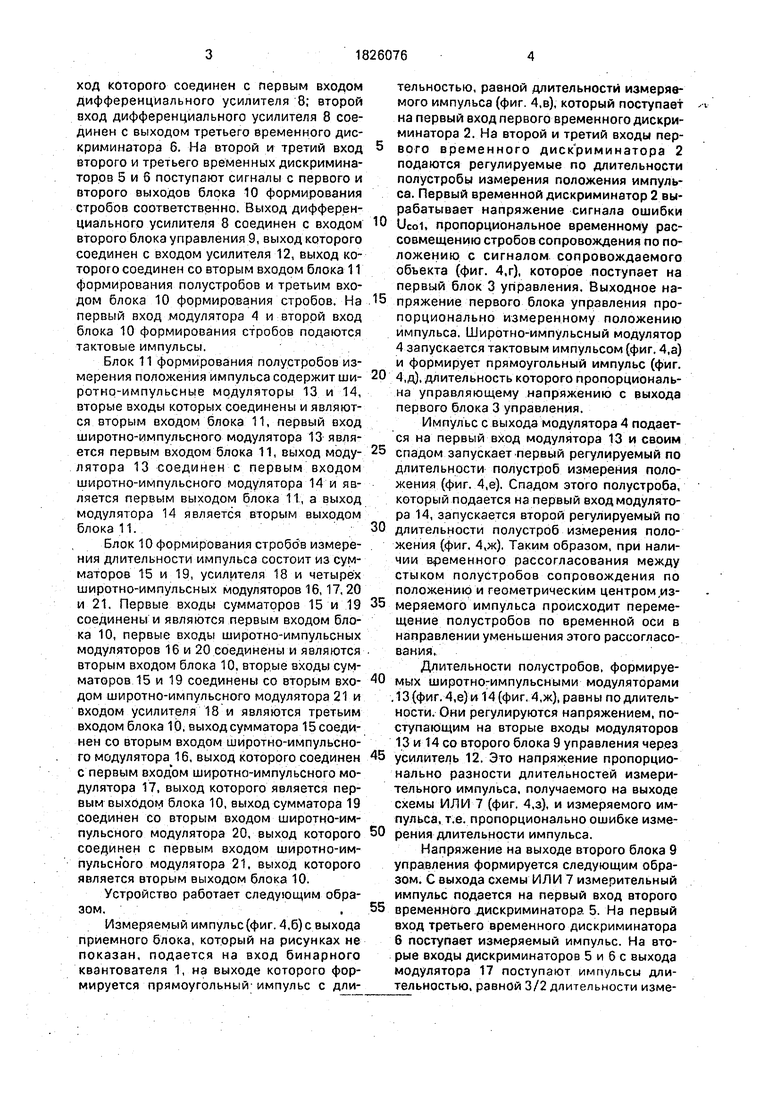
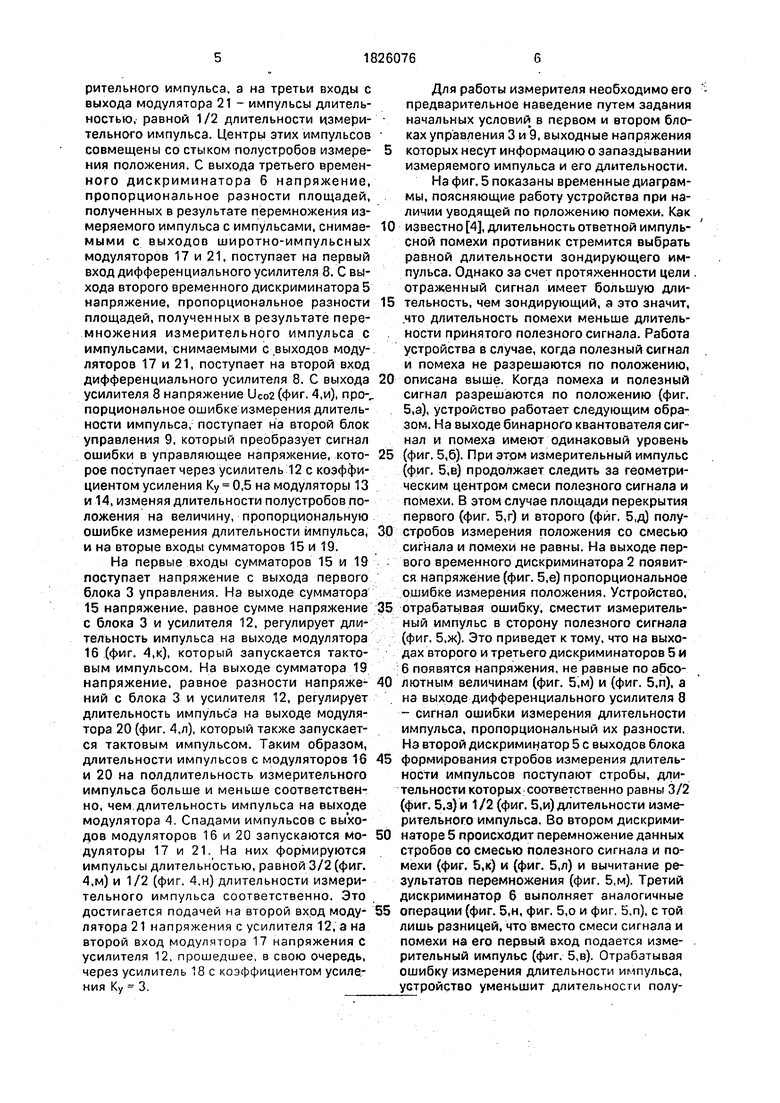
На фиг. 1 приведена структурная схема устройства измерения временного положения и длительности импульса; на фиг. 2 - структурная схема блока формирования полустробов измерения положения импульса; на фиг. 3 - структурная схема блока формирования стробов измерения длительности; на фиг. 4 -временные диаграммы, поясняющие работу устройства; на фиг. 5 - временные диаграммы, поясняющие работу устройства при наличии уводящей помехи по положению.
Устройство для измерения временного положения и длительности импульса содержит бинарный квантователь 1, на вход которого подается измеряемый импульс, а выход соединен с первыми входами первого и третьего временных дискриминаторов 2 и 6, выход первого временного дискриминатора 2 соединен с входом первого блока управления 3, выход которого соединен со вторым входом широтно-импульсного модулятора 4 и первым входом блока 10 формирования стробов измерения длительности импульса. Выход широтно-импульсного модулятора 4 соединен с первым входом блока 11 формирования полустробов измерения положения импульса, первый и второй выходы которого соединены с третьим и вторым входами первого временного дискриминатора 2 и вторым и первым входами схемы ИЛИ 7 соответственно. Выход схемы ИЛИ 7 соединен с первым входом второго временного дискриминатора 5, высо
с
со го о о XI о
ход которого соединен с первым входом дифференциального усилителя 8; второй вход дифференциального усилителя 8 соединен с выходом третьего временного дискриминатора 6. На второй и третий вход второго и третьего временных дискриминаторов 5 и 6 поступают сигналы с первого и второго выходов блока 10 формирования стробов соответственно. Выход дифференциального усилителя 8 соединен с входом второго блока управления 9,выход которого соединен с входом усилителя 12, выход которого соединен со вторым входом блока 11 формирования полустробов и третьим входом блока 10 формирования стробов. На первый вход модулятора 4 и второй вход блока 10 формирования стробов подаются тактовые импульсы.
Блок 11 формирования полустробов измерения положения импульса содержит ши- ротно-импульсные модуляторы 13 и 14, вторые входы которых соединены и являются вторым входом блока 11, первый вход широтно-импульсного модулятора 13 является первым входом блока 11, выход модулятора 13 соединен с первым входом широтно-импульсного модулятора 14 и является первым выходом блока 11, а выход модулятора 14 является вторым выходом блока 11.
Блок 10 формирования стробов измерения длительности импульса состоит из сумматоров 15 и 19, усилителя 18 и четырех широтно-импульсных модуляторов 16,17,20 и 21, Первые входы сумматоров 15 и 19 соединены и являются первым входом блока 10, первые входы широтно-импульсных модуляторов 16 и 20 соединены и являются вторым входом блока 10, вторые входы сумматоров 15 и 19 соединены со вторым входом широтно-импульсного модулятора 21 и входом усилителя 18 и являются третьим входом блока 10, выход сумматора 15 соединен со вторым входом широтно-импульсного модулятора 16, выход которого соединен с первым входом широтно-импульсного модулятора 17, выход которого является первым выходом блока 10, выход сумматора 19 соединен со вторым входом широтно-импульсного модулятора 20, выход которого соединен с первым входом широтно-импульсного модулятора 21, выход которого является вторым выходом блока 10.
Устройство работает следующим образом.
Измеряемый импульс (фиг. 4,6) с выхода приемного блока, который на рисунках не показан, подается на вход бинарного квантователя 1, на выходе которого формируется прямоугольный импульс с длительностью, равной длительности измеряемого импульса (фиг. 4,в), который поступает на первый вход первого временного дискриминатора 2. На второй и третий входы первого временного дискриминатора 2 подаются регулируемые по длительности полустробы измерения положения импульса. Первый временной дискриминатор 2 вырабатывает напряжение сигнала ошибки
Ucoi, пропорциональное временному рас- совмещению стробов сопровождения по положению с сигналом сопровождаемого объекта (фиг. 4,г), которое поступает на первый блок 3 управления. Выходное на5 пряжение первого блока управления пропорционально измеренному положению импульса. Широтно-импульсный модулятор 4 запускается тактовым импульсом (фиг. 4,а) и формирует прямоугольный импульс (фиг.
0 4,д), длительность которого пропорциональна управляющему напряжению с выхода первого блока 3 управления.
Импульс с выхода модулятора 4 подается на первый вход модулятора 13 и своим
5 спадом запускает первый регулируемый по длительности полустроб измерения положения (фиг. 4,е). Спадом этого полустроба, который подается на первый вход модулятора 14, запускается второй регулируемый по
0 длительности полустроб измерения положения (фиг. 4,ж), Таким образом, при наличии временного рассогласования между стыком полустробов сопровождения по положению и геометрическим центром ,из5 меряемого импульса происходит перемещение полустробов по временной оси в направлении уменьшения этого рассогласования,
Длительности полустробов, формируео мых широтно-импульсными модуляторами . 13 (фиг. 4,е) и 14 (фиг. 4,ж), равны по длительности. Они регулируются напряжением, поступающим на вторые входы модуляторов 13 и 14 со второго блока 9 управления через
5 усилитель 12. Это напряжение пропорционально разности длительностей измерительного импульса, получаемого на выходе схемы ИЛИ 7 (фиг. 4,з), и измеряемого импульса, т.е. пропорционально ошибке изме0 рения длительности импульса.
Напряжение на выходе второго блока 9 управления формируется следующим образом. С выхода схемы ИЛИ 7 измерительный импульс подается на первый вход второго
5 временного дискриминатора 5. На первый вход третьего временного дискриминатора 6 поступает измеряемый импульс. На вторые входы дискриминаторов 5 и 6 с выхода модулятора 17 поступают импульсы длительностью, равной 3/2 длительности измерительного импульса, а на третьи входы с выхода модулятора 21 - импульсы длительностью, равной 1/2 длительности нзмери- тельного импульса. Центры этих импульсов совмещены со стыком полустробов измере- ния положения. С выхода третьего временного дискриминатора 6 напряжение, пропорциональное разности площадей, полученных в результате перемножения измеряемого импульса с импульсами, снимав- мыми с выходов широтно-импульсных модуляторов 17 и 21, поступает на первый вход дифференциального усилителя 8. С выхода второго временного дискриминатора 5 напряжение, пропорциональное разности площадей, полученных в результате перемножения измерительного импульса с импульсами, снимаемыми с.выходов модуляторов 17 и 21, поступает на второй вход дифференциального усилителя 8. С выхода усилителя 8 напряжение UCo2 (фиг. 4,и), про% порциональное ошибке измерения длительности импульса, поступает на второй блок управления 9, который преобразует сигнал ошибки в управляющее напряжение, кото- рое поступает через усилитель 12 с коэффициентом усиления Ку 0,5 на модуляторы 13 и 14, изменяя длительности полустробов положения на величину, пропорциональную ошибке измерения длительности импульса, и на вторые входы сумматоров 15 и 19.
На первые входы сумматоров 15 и 19 поступает напряжение с выхода первого блока 3 управления. На выходе сумматора
15напряжение, равное сумме напряжение с блока 3 и усилителя 12, регулирует длительность импульса на выходе модулятора
16(фиг. А,к), который запускается тактовым импульсом. На выходе сумматора 19 напряжение, равное разности напряже- ний с блока 3 и усилителя 12, регулирует длительность импульса на выходе модулятора 20 (фиг. 4,л), который также запускается тактовым импульсом. Таким образом, длительности импульсов с модуляторов 16 и 20 на полдлительность измерительного импульса больше и меньше соответственно, чем длительность импульса на выходе модулятора 4. Спадами импульсов с выходов модуляторов 16 и 20 запускаются мо- дуляторы 17 и 21. На них формируются импульсы длительностью, равной 3/2 (фиг. 4,м) и 1/2 (фиг. 4,н) длительности измерительного импульса соответственно. Это достигается подачей на второй вход моду- лятора 21 напряжения с усилителя 12, а на второй вход модулятора 17 напряжения С усилителя 12, прошедшее, в свою очередь, через усилитель 18с коэффициентом усиления Ку 3.
Для работы измерителя необходимо его предварительное наведение путем задания начальных условий в первом и втором блоках управления 3 и 9, выходные напряжения которых несут информацию о запаздывании измеряемого импульса и его длительности.
На фиг. 5 показаны временные диаграммы, поясняющие работу устройства при наличии уводящей по положению помехи. Как известно 4, длительность ответной импульсной помехи противник стремится выбрать равной длительности зондирующего импульса. Однако за счет протяженности цели отраженный сигнал имеет большую длительность, чем зондирующий, а это значит, .что длительность помехи меньше длительности принятого полезного сигнала. Работа устройства в случае, когда полезный сигнал и помеха не разрешаются по положению, описана выше. Когда помеха и полезный сигнал разрешаются по положению (фиг, 5,а), устройство работает следующим образом. На выходе бинарного квантователя сигнал и помеха имеют одинаковый уровень (фиг. 5,6), При этом измерительный импульс (фиг. 5,в) продолжает следить за геометрическим центром смеси полезного сигнала и помехи. В этом случае площади перекрытия первого (фиг. 5,г) и второго (фиг. 5,д) полустробов измерения положения со смесью сигнала и помехи не равны. На выходе первого временного дискриминатора 2 появится напряжение (фиг. 5,е) пропорциональное ошибке измерения положения. Устройство, отрабатывая ошибку, сместит измерительный импульс в сторону полезного сигнала (фиг. 5,ж). Это приведет к тому, что на выходах второго и третьего дискриминаторов 5 и 6 появятся напряжения, не равные по абсолютным величинам (фиг. 5,м) и (фиг. 5,п), а на выходе дифференциального усилителя 8 - сигнал ошибки измерения длительности импульса, пропорциональный их разности. На второй дискриминатор 5 с выходов блока формирования стробов измерения длительности импульсов поступают стробы, длительности которых соответственно равны 3/2 (фиг. 5,з)и 1/2 (фиг. 5,и) длительности измерительного импульса. Во втором дискриминаторе 5 происходит перемножение данных стробов со смесью полезного сигнала и помехи (фиг. 5,к) и (фиг. 5,л) и вычитание результатов перемножения (фиг. 5,м). Третий дискриминатор 6 выполняет аналогичные операции (фиг. 5,н, фиг. 5,о и фиг. 5,п), с той лишь разницей, что вместо смеси сигнала и помехи на его первый вход подается измерительный импульс (фиг. 5,в). Отрабатывая ошибку измерения длительности импульса, устройство уменьшит длительности полустробов измерения положения, что приведет к появлению новой ошибки в измерении положения импульса. Смещая измерительный импульс в сторону полезного сигнала и изменяя его длительность, устройство добь- ется того, что в конечном итоге ошибки измерения положения и длительности импульса будут сведены к нулю.
Формулам я обретения Устройство для определения временного положения и длительности импульса, содержащее два временных дискриминатора, два блока управления, блок формирования стробов измерения длительности и после- довательно соединенные широтно-импуль- сный модулятор и блок формирования полустробов измерения положения, причем выход первого блока управления соединен с вторым входом широтно-импульсного мо- дулятора, к первому входу которого подключена шина тактового сигнала, выходы первого и второго блоков управления подключены к соответствующим выходам устройства, отличающееся тем, что, с целью увеличения помехозащищенности, в него введены бинарный квантователь, схема ИЛИ, временной дискриминатор, дифференциальный усилитель и усилитель, причем выход бинарного квантователя сое- динен с первыми входами первого и третьего временных дискриминаторов, выходы которых соединены соответственно с вхй- дом первого блока управления и вторым входом дифференциального усилителя, вы- ход которого через последовательно соединенные второй блок управления и усилитель соединен с третьим входом блока формирования стробов измерения длительности и вторым входом блока формирования полу- стробов измерения положения, выход первого блока управления соединен с первым входом блока формирования стробов измерения длительности, второй вход которого подключен к шине тактового сигнала, первый выход соединен с вторыми входами второго и третьего временных дискриминаторов, а второй выход - с третьими входами второго и третьего временных дискриминаторов, первый выход блока формирования полустробов измерения положения соединен с третьим входом первого временного дискриминатора и вторым входом схемы ИЛИ, второй выход блока формирования полустробов измерения положения соединен с вторым входом первого временного дискриминатора и первым входом схемы ИЛИ, выход которой соединен с первым входом второго временного дискриминатора, выход которого подключен к первому входу дифференциального усилителя, при этом блок формирования стробов измерения длительности содержит два сумматора, усилитель и четыре широтно-импульсных модулятора, первые входы первого и второго сумматоров объединены и подключены к первому входу блока формирования, второй вход которого подключен к первым входам первого и третьего широтно-импульсных модуляторов, а третий вход соединен с вторыми входами первого и второго сумматоров, входом усилителя и вторым входом четвертого широтно-импульсного модулятора, выход которого подключен к второму выходу блока формирования, первый выход которого соединен с выходом второго широтно-импульсного модулятора, выходы первого и второго сумматоров соединены соответственно с вторыми входами первого и третьего широтно-импульсных модуляторов, выходы которых подключены к первым входам соответственно второго и четвертого широтно-импульсных модуляторов, выход усилителя соединен с вторым входом второго широтно-импульсного модулятора. 2. Устройство поп. 1,отличающее- с я тем, что блок формирования полустробов измерения положения содержит два широтно-импульсных модулятора, вторые входы .которых объединены и подключены к второму входу блока формирования, первый вход которого соединен с первым входом первого широтно-импульсного модулятора, выход которого подключен к первому выходу блока формирования и первому входу второго широтно-импульсного модулятора, выход которого соединен с вторым выходом блока формирования.
ft./.
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионное устройство измерения координат и скорости | 1983 |
|
SU1107340A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2001 |
|
RU2217874C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| Устройство для измерения временного положения и длительности импульса | 1980 |
|
SU924655A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ЗАХВАТА И СОПРОВОЖДЕНИЯ ВИДЕОИМПУЛЬСОВ | 1971 |
|
SU305598A1 |
| Цифровой временной дискриминатор | 1989 |
|
SU1718374A1 |


Изобретение относится к импульсной технике и может быть использовано в телевизионных системах определения параметров объектов. Сущность: устройство Содержит бинарный квантователь, три временных дискриминатора, два блока управления, широтно-импульсный модулятор, схемы ИЛИ, дифференциальный усилитель, блок формирования стробов измерения длительности, блок формирования полустробов измерения положения, усилитель с соответствующими связями. 5 ил.
4UЈ
r
п
n
п
| Цивилин И.П | |||
| Электронный дальномер с двумя интеграторами | |||
| М.: Сов | |||
| радио, 1964, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Устройство для измерения временного положения и длительности импульса | 1980 |
|
SU924655A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
