Изобретение относится к электротехнике и может быть использовано для измерения частоты вращения электродвигателя постоянного тока.
Цель изобретения повышение частоты надежности и улучшение эксплуатационных характеристик.
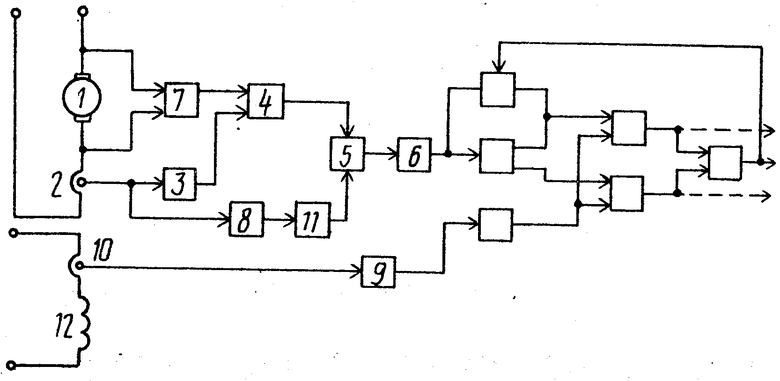
На чертеже приведена структурная схема устройства для определения частоты вращения электродвигателя постоянного тока.
Устройство содержит последовательно соединенные датчик тока якоря, первый масштабный усилитель 2, первый и второй элементы 3 и 4 сравнения, делитель 5 напряжения, интегратор 6 с парафазными выходами, первый компаратор 7 и логический элемент ИЛИ 8, ключ 9, второй компаратор 10, второй масштабный усилитель 11, дифференциатор 12, датчик 13 напряжения, последовательно соединенные датчик 14 тока возбуждения, третий масштабный усилитель 15 и блок 16 выделения модуля сигнала, выход которого соединен со вторыми входами первого и второго компараторов 7 и 10, первый вход второго компаратора 10 соединен с инвеpтирующим выходом интегратора 6 с парафазными выходами, а выход соединен с вторым входом логического элемента ИЛИ 8, выход которого является выходом устройства и соединен с управляющим входом ключа 9, подключенного параллельно интегратору 6 с парафазными выходами, второй вход второго элемента 4 сравнения соединен с выходом дифференциатора 12, входом через второй масштабный усилитель 11 соединенного со входом первого масштабного усилителя 2, второй вход первого элемента 3 сравнения соединен с выходом датчика 13 напряжения, входы которого предназначены для подключения к электродвигателю 17, в якорную цепь которого подключается датчик 1 тока якоря, а в цепь обмотки 18 возбуждения датчик 14 тока возбуждения.
Устройство работает следующим образом.
Уравнение электромеханической характеристики электродвигателя постоянного тока независимого возбуждения имеет вид:
ω  Uя-IяRяΣ-LяΣ
Uя-IяRяΣ-LяΣ  где Uя напряжение на якоре электродвигателя 17;
где Uя напряжение на якоре электродвигателя 17;
Iя ток в якорной цепи;
RяΣ Lя Σ суммарное активное сопротивление и индуктивность якорной цепи;
К конструктивный коэффициент;
Φ магнитный поток.
Устройство представляет собой электронную модель электродвигателя 17, работающую в реальном масштабе времени и описываемую уравнением:
U3 U13-K1K2Iя,
U4= U3-K1K11T12 где U3, U4 выходные сигналы первого и второго элементов 3 и 4 сравнения;
где U3, U4 выходные сигналы первого и второго элементов 3 и 4 сравнения;
U13 выходной сигнал датчика 13 напряжения;
К1 коэффициент передачи датчика 1 тока якоря;
К2, К11 коэффициенты передачи первого и второго масштабных усилителей 2 и 11;
Т12 постоянная времени дифференциатора 12.
Масштаб выходных сигналов элементов устройства задается выбором коэффициента передачи К13 датчика 13 напряжения, определяемого из выражения:
K13=  где U13макс максимальный выходной сигнал датчика 13 напряжения;
где U13макс максимальный выходной сигнал датчика 13 напряжения;
Uян номинальное напряжение на якоре электродвигателя 17.
Сравнение сигналов на элементах 3 и 4 сравнения осуществляется при соотношении их уровней, задаваемом коэффициентами передачи первого и второго масштабных усилителей 2 и 11, выбираемых из формул:
K2= 
K11= 
Так как связь между потоком Φ и током возбуждения Iв задается характеристикой, в которой при малых изменениях поля Δ Φ, обусловленных нестабильностью тока Iв в цепи обмотки 18 возбуждения, сохраняется линейное соотношение
λ 
Коэффициент передачи третьего масштабного усилителя 15 выбирается из соотношения:
K15=  где К14 коэффициент передачи датчика 14 тока возбуждения.
где К14 коэффициент передачи датчика 14 тока возбуждения.
До начала вращения электродвигателя 17 до тех пор, пока на выходе второго элемента 4 сравнения не появится сигнал U4, на обоих парафазных выходах интегратора 6 сигналы будут отсутствовать, не изменяя нулевого состояния первого и второго компараторов 7 и 10, выходные сигналы U7 и U10 которых изменяются в соответствии с выражениями:
U7= 




U10= 



 где Uk1, Uk2 выходные сигналы первого и второго компараторов 7 и 10, соответствующие уровню логической "единицы";
где Uk1, Uk2 выходные сигналы первого и второго компараторов 7 и 10, соответствующие уровню логической "единицы";
U6+, U6- выходные сигналы интегратора 6 на неинвертирующем и инвертирующем выходах;
U16 выходной сигнал блока 16 выделения модуля сигнала, определяемый из выражения
U16 U15 в котором U15 сигнал уровня, соответствующего потоку возбуждения электродвигателя 17, определяемый из выражения
U15 K14K15Iв.
При этом сигнал уровня логического "нуля" на выходе логического элемента ИЛИ 8 воздействует на управляющий вход ключа 9, оставляя его в разомкнутом состоянии, а интегратор 6 парафазными выходами готовым к работе.
При вращении электродвигателя 17 с выхода второго элемента 4 сравнения поступает сигнал U4, соответствующий ЭДС, ослабляется в Kg раз делителем 5 напряжения и воздействует на вход расшунтированного интегратора 6, определяя интенсивность линейного нарастания парафазных сигналов U6+ и U6- на его выходах.
Как только сигнал U6+ интегратора 6 с паpафазными выходами достигнет заданного уровня U16, на выходе первого компаратора 7 появится сигнал U7 уровня логической "единицы", проходит на выход логического элемента ИЛИ 8 и воздействует на управляющий вход ключа 9, который шунтирует интегратор 6. Выходные сигналы последнего мгновенно уменьшаются до нуля, что сразу же вызывает появление на выходе первого компаратора 7 "нулевого" сигнала, который размыкает ключ 9, после чего на парафазных выходах интегратора 6 вновь появляются линейно нарастающие сигналы U6+ и U6-.
Следовательно, при достаточно высоком быстродействии компараторов 7, 10 и ключа 9 на выходах компаратора 7 и логического элемента ИЛИ 8 появляется короткий (t4) импульс сигнала уровня логической "единицы".
На выходах интегратора 6 формируются парафазные пилообразные сигналы с периодом Твых, который определяет период следования импульсов выходного сигнала. Так как tu << Tвых, то с учетом того, что Твых частоту импульсов сигнала U7 на выходе первого компаратора 7 и импульсов сигнала U8 на выходе логического элемента ИЛИ 8, соответствующую частоте вращения электродвигателя 17, можно определить по формуле
частоту импульсов сигнала U7 на выходе первого компаратора 7 и импульсов сигнала U8 на выходе логического элемента ИЛИ 8, соответствующую частоте вращения электродвигателя 17, можно определить по формуле
fвых= ω  где Т6 постоянная времени интегрирования интегратора 6;
где Т6 постоянная времени интегрирования интегратора 6;
U15 выходной сигнал третьего масштабного усилителя 15.
Установкой величины коэффициента Kg делителя 5 напряжения частота вращения электродвигателя 17 может быть задана в любых единицах измерения и измерена на выходах либо первого компаратора 7, либо логического элемента ИЛИ 8 с помощью частотомера. При этом на выходе второго компаратора 10 при заданном вращении электродвигателя 17 сохранится сигнал логического "нуля".
При изменении направления вращения электродвигателя 17 частота определяется на выходах либо второго компаратора 10, либо логического элемента ИЛИ 8, а на выходе первого компаратора 7 при этом сохранится нулевой сигнал. По наличию импульсов сигнала на выходах первого или второго компараторов 7 и 10 таким образом можно судить о направлении вращения электродвигателя 17.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВОЙНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2037263C1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| МНОЖИТЕЛЬНОЕ УСТРОЙСТВО | 1993 |
|
RU2082996C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Электропривод стенда для испытания механических передач | 1985 |
|
SU1429267A1 |
| ПРОТИВОБЛОКИРОВОЧНОЕ ТОРМОЗНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU1773007C |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МАТЕРИАЛОВ | 1996 |
|
RU2108568C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОЧИСТНОГО ПОРШНЯ В ТРУБОПРОВОДЕ | 1995 |
|
RU2123896C1 |
Использование: для измерения частоты вращения электродвигателя постоянного тока. Сущность: в данном устройстве при измерении частоты вращения учитывается изменение потока возбуждения. 1 ил.
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА, содержащее последовательно соединенные датчик тока якоря, первый масштабный усилитель и первый элемент сравнения, датчик тока возбуждения и датчик напряжения, выход которого соединен с вторым входом первого элемента сравнения, а входы предназначены для подключения к электродвигателю, отличающееся тем, что, с целью повышения надежности и улучшения эксплуатационных характеристик, в него введены второй элемент сравнения, дифференциатор, второй и третий масштабные усилители, последовательно соединенные делитель напряжения, интегратор с парафазными выходами, первый компаратор и логический элемент ИЛИ, ключ, блок выделения модуля сигнала и второй компаратор, выходом соединенный с вторым входом логического элемента ИЛИ, выход которого соединен с управляющим входом ключа, подключенного параллельно интегратору с парафазными выходами, инвертирующий выход которого соединен с первым входом второго компаратора, вторым входом соединенного с вторым входом первого компаратора и выходом блока выделения модуля сигнала, вход которого через третий масштабный усилитель соединен с выходом датчика тока возбуждения, при этом вход делителя напряжения соединен с выходом второго элемента сравнения, первый вход которого соединен с выходом первого элемента сравнения, а второй вход соединен с выходом дифференциатора, вход которого через второй масштабный усилитель соединен с выходом датчика тока якоря.
| Гарнов В.К | |||
| и др | |||
| Унифицированные системы автоуправления электроприводом в металлургии | |||
| М.: Металлургия, 1971, с.178-182, рис.73б, 74. |
