Изобретение относится к измерительной технике, в частности к датчикам угловой скорости (ДУС) поплавкового типа с бескон- такным подвесом поплавковой камеры (ПК).
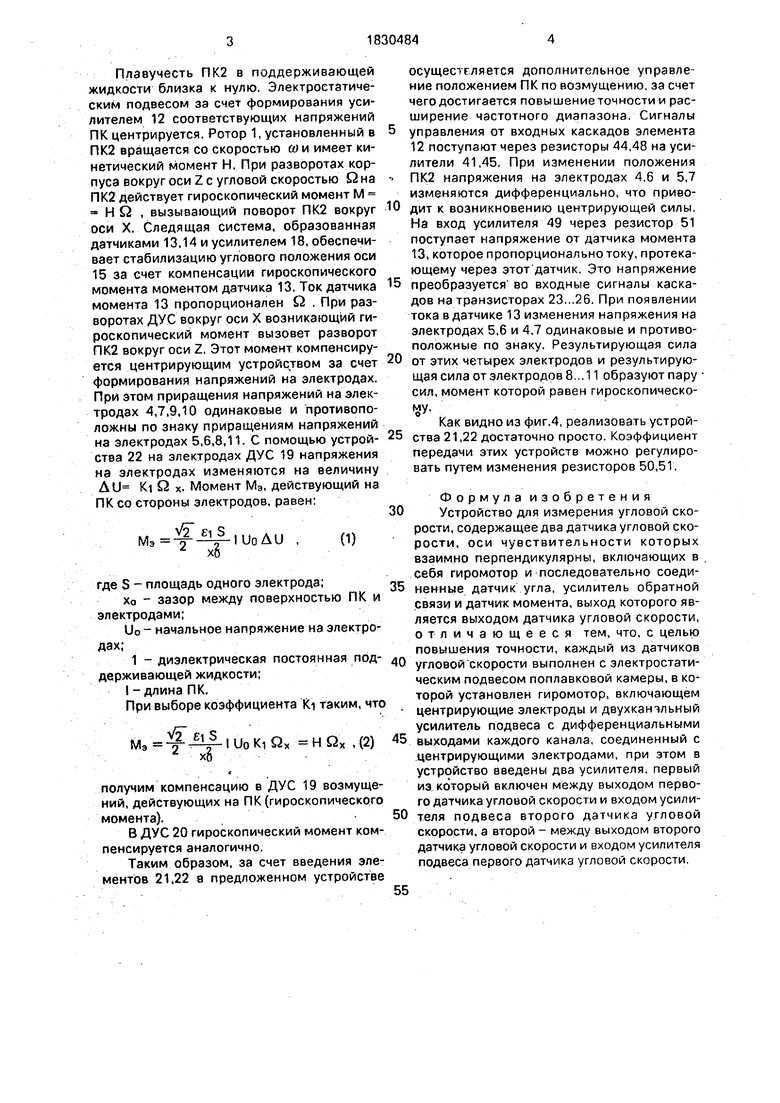
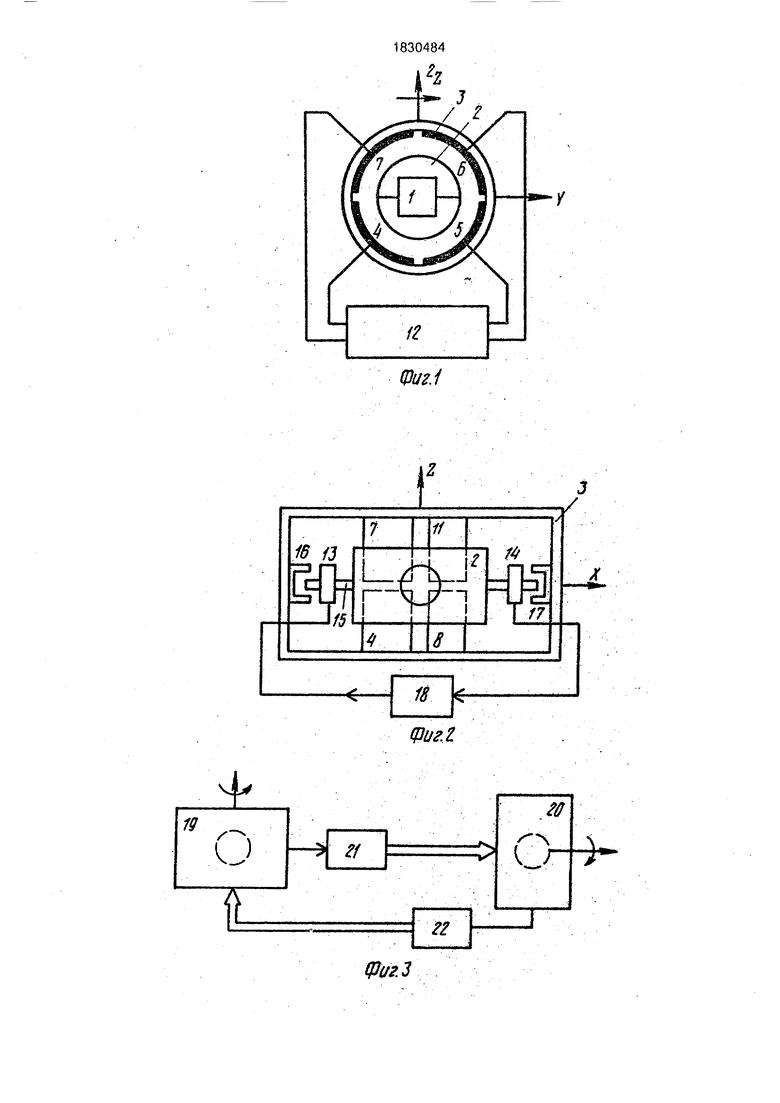
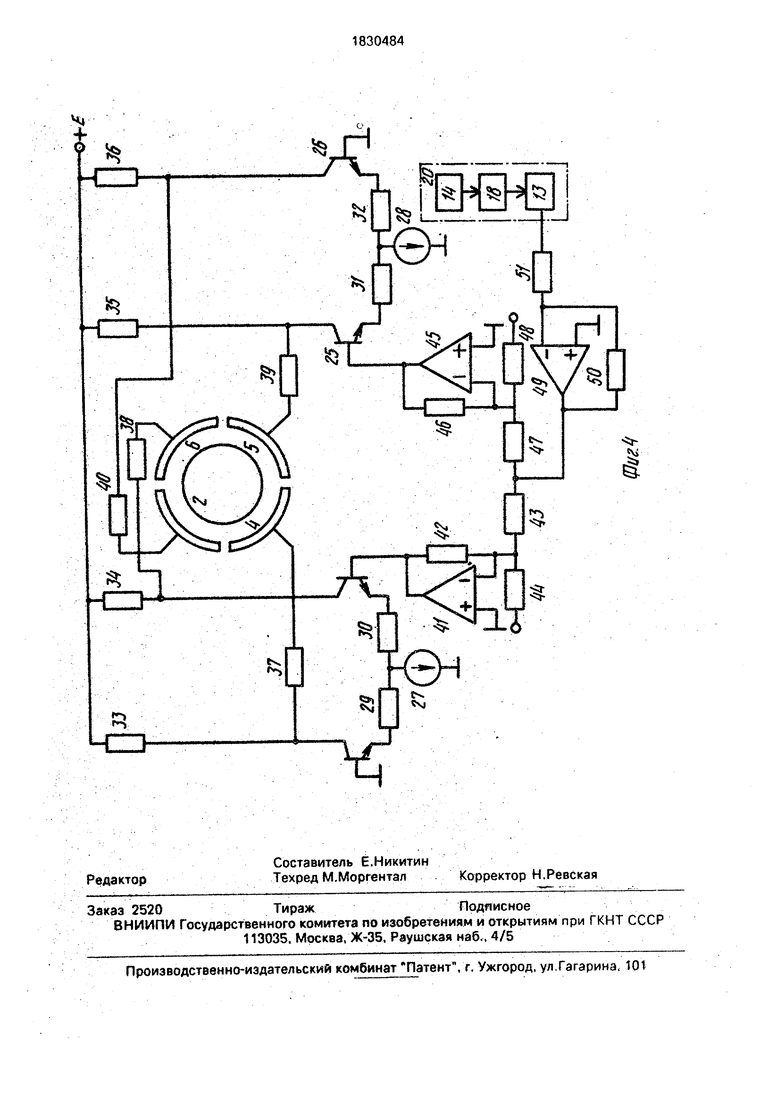
На фиг.1 приведен поперечный разрез чувствительного элемента (ЧЭ) ДУС с усилителем подвеса; на фиг.2 - продольный разрез ЧЭ с усилителем обратной связи; на фиг.3 - блок-схема предложенного устрой-1 ства; на фиг.4 - вариант схемной реализации предложенного устройства.:
В ЧЭ ДУС (см.фиг. 1) входят гиромотор 1, ПК2, корпус 3, на внутренней поверхности которого установлены электроды 4-7 и 8-11 (да фиг.1 не показаны). К этим электродам подключен усилитель центрирующего уст- ррйства (подвеса) 12. Зазор между ПК и внутренней поверхностью корпуса заполнен поддерживающей жидкостью. Датчик момента 13, датчик угла 14 установлены на оси 15, на которой закреплена ПК2. Цапфы 16,17 установлены на корпусе, они ограничивают перемещения оси 15, Усилитель обратной связи 18 включен между датчиками 14,13 (ем.фиг.2). К выходам ДУС 19 и 20 подключены усилительно-преобразовательные устройства 21,22, выходы которых соединены с соответствующим электродами ДУСов 20 и 19. При этом направления продольной оси ДУСа 19 совпадает с осью чувствительности ДУСа 20 и наоборот (фиг.З). Выходные каскады усилителя 12 (фиг.4) выполнены на транзисторах 23,24 и 25,26, включенных совместно с источниками тока 27,28, резисторами 29...36 по схеме дифференцированного каскада, Выходы этих каскадов через резисторы 37...40 соединены с соответствующими электродами. К входам дифференциальных каскадов подключены усилитель 41 с резисторами 42-44, 46-48. Введение усилительно-преобразовательного устройства выполнено в виде усилителя 49 с резисторами 50,51, вход которого подключен к датчику момента 13.
Устройство работает следующим образом.
Ј
00
со
2
00
Плавучесть ПК2 в поддерживающей жидкости близка к нулю. Электростатическим подвесом за счет формирования усилителем 12 соответствующих напряжений ПК центрируется. Ротор 1, установленный в ПК2 вращается со скоростью ft) и имеет кинетический момент Н. При разворотах корпуса вокруг оси Z с угловой скоростью Ј2на ПК2 действует гироскопический момент М Н Q , вызывающий поворот ПК2 вокруг оси X. Следящая система, образованная датчиками 13,14 и усилителем 18, обеспечивает стабилизацию углового положения оси 15 за счет компенсации гироскопического момента моментом датчика 13. Ток датчика момента 13 пропорционален Q . При разворотах ДУС вокруг оси X возникающий гироскопический момент вызовет разворот ПК2 вокруг оси Z. Этот момент компенсируется центрирующим устройством за счет формирования напряжений на электродах. При этом приращения напряжений на электродах 4,7,9,10 одинаковые и противоположны по знаку приращениям напряжений на электродах 5,6,8,11. С помощью устрой- ства 22 на электродах ДУС 19 напряжения на электродах изменяются на величину AU Ki Q x. Момент Мэ, действующий на ПК со стороны электродов, равен:
V2 ei S
Мэ о
хЗ
lUoAU
(1)
где S - площадь одного электрода;35
х0 - зазор между поверхностью ПК и электродами;
U0- начальное напряжение на электродах;
1 - диэлектрическая постоянная под- /JQ держивающей жидкости;
I -длина ПК.
При выборе коэффициента Ki таким, что
v7eiS к8
lUoKiQ HQX ,(2) 45
получим компенсацию в ДУС 19 возмущений, действующих на ПК (гироскопического момента).50
В ДУС 20 гироскопический момент компенсируется аналогично.
Таким образом, за счет введения элементов 21,22 в предложенном устройстве
55
осуществляется дополнительное управление положением ПК по возмущению, за счет чего достигается повышение точности и расширение частотного диапазона. Сигналы управления от входных каскадов элемента 12 поступают через резисторы 44,48 на усилители 41,45. При изменении положения ПК2 напряжения на электродах 4,6 и 5,7 изменяются дифференциально, что приводит к возникновению центрирующей силы. На вход усилителя 49 через резистор 51 поступает напряжение от датчика момента 13, которое пропорционально току, протекающему через этот датчик. Это напряжение преобразуется во входные сигналы каскадов на транзисторах 23...26. При появлении тока в датчике 13 изменения напряжения на электродах 5,6 и 4,7 одинаковые и противоположные по знаку. Результирующая сила от этих четырех электродов и результирую- щая сила от электродов 8... 11 образуют пару сил, момент которой равен гироскопическоМУКак видно из фиг.4, реализовать устройства 21,22 достаточно просто. Коэффициент передачи этих устройств можно регулировать путем изменения резисторов 50,51.
Формула изобретения Устройство для измерения угловой скорости, содержащее два датчика угловой скорости, оси чувствительности которых взаимно перпендикулярны, включающих в себя гиромотор и последовательно соединенные датчик угла, усилитель обратной связи и датчик момента, выход которого является выходом датчика угловой скорости, отличающееся тем, что, с целью повышения точности, каждый из датчиков угловой скорости выполнен с электростатическим подвесом поплавковой камеры, в которой установлен гиромотор, включающем центрирующие электроды и двухканчльный усилитель подвеса с дифференциальными выходами каждого канала, соединенный с .центрирующими электродами, при этом в устройство введены два усилителя, первый из который включен между выходом первого датчика угловой скорости и входом усилителя подвеса второго датчика угловой скорости, а второй - между выходом второго датчика угловой скорости и входом усилителя подвеса первого датчика угловой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| Устройство для настройки выключателя коррекции, построенного на базе двух гироскопических датчиков угловых скоростей | 2024 |
|
RU2839681C1 |
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2017 |
|
RU2641018C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| СПОСОБ НАСТРОЙКИ БЛОКА ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ, СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДРЕЙФА ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЯ КОЛЕБАТЕЛЬНОСТИ И ПОЛОСЫ ПРОПУСКАНИЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА ДАТЧИКА УГЛОВОЙ СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ЮСТИРОВКИ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269747C1 |
Изобретение относится к измерительной технике и может быть использовано при измерении угловой скорости. Сущность изобретения: устройство содержит два датчика угловой скорости, два усилителя, каждый датчик угловой скорости включает в себя датчик угла, усилитель обратной связи, датчик момента и выполнен с электростатическим подвесом поплавковой камеры, в которой установлен гиромотор, включающий центрирующие электроды и усилитель подвеса. 4 ил.
±
19
s
и
if
U
Фиг.1
(Риг. I
го
.N
;
WlJ
| Никитин Е.А | |||
| и Балашова А.А | |||
| Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров | |||
| М.: Машиностроение, 1969, с.105,115-120 | |||
| Авторское свидетельство СССР N5634212, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
