(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Синтезатор частот | 1987 |
|
SU1417165A1 |
| Устройство для допускового контроля частоты | 1990 |
|
SU1781633A1 |
| Умножитель частоты | 1991 |
|
SU1781817A1 |
| Преобразователь частоты следования импульсов в код | 1991 |
|
SU1780037A1 |
| Устройство измерения частотных характеристик группового времени запаздывания четырехполюсников | 1988 |
|
SU1631511A1 |
| Цифровой синтезатор частот | 1990 |
|
SU1748251A1 |
| Устройство для допускового контроля частоты | 1990 |
|
SU1748240A1 |
| Устройство для формирования сигналов | 1989 |
|
SU1651294A1 |
| Управляемый делитель частоты следования импульсов | 1989 |
|
SU1709515A1 |
| Генератор сетки амплитудно-модулированных сигналов | 1990 |
|
SU1739473A1 |
Изобретение может быть использовано при измерении времени запаздывания электрических сигналов в различных элементах задержки. Цель изобретения - повы- шение точности измерения времени запаздывания элемента задержки. Способ определения времени запаздывания элемента задержки заключается в том, что преобразуют последовательность импульсов с частотой следования fex в последовательность импульсов с временной модуляцией со средней частотой fk, изменяют частоту fBX последовательности импульсов, определяют частоту fBx. на которой подавляются спектральные составляющие на частотах fk±m/T, где m 1, 3, 5,...; Т 1 /fk, измеряют частоту fax и используют результаты из- мере,ния для вычисления времени запаздывания по формуле Тз 1/2 причем fk меньше fex в дробное число раз. 4 ил.
Изобретение относится к радиоизмерительной технике и может быть использовано для прецизионного измерения наносекунд- ных и пикосекундных задержек различных физических элементов (отрезков линий, интегральных схем и т.д.).
Целью изобретения является повышение точности.
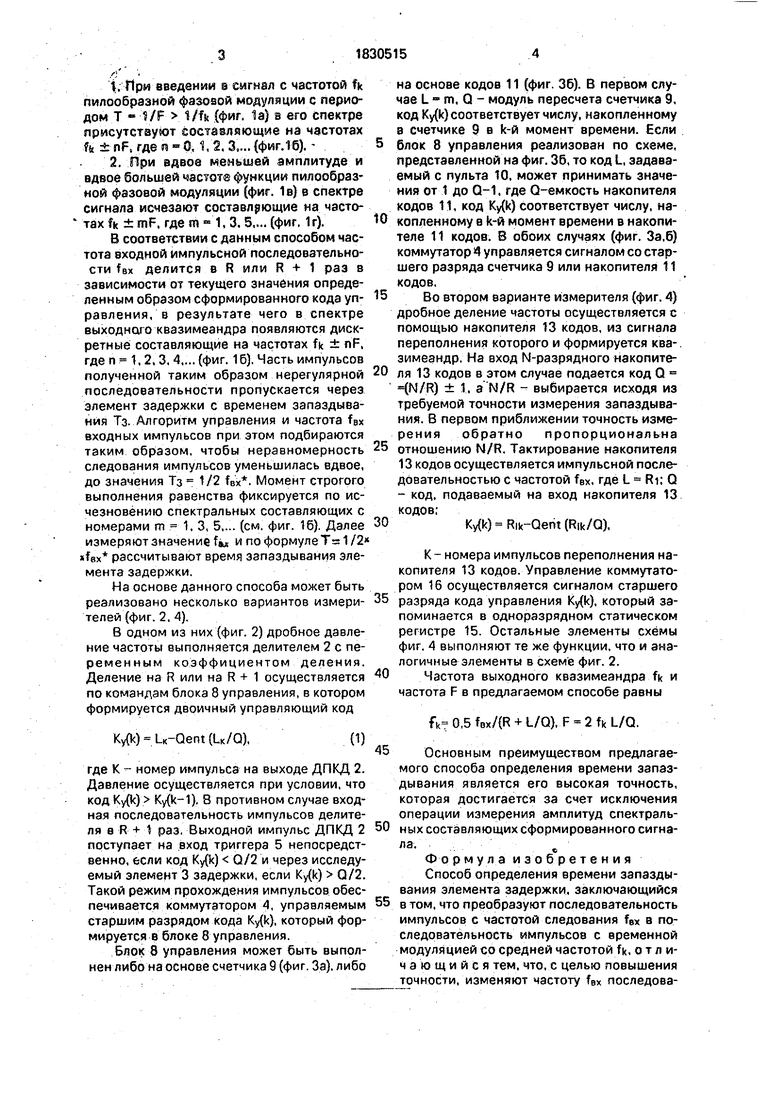
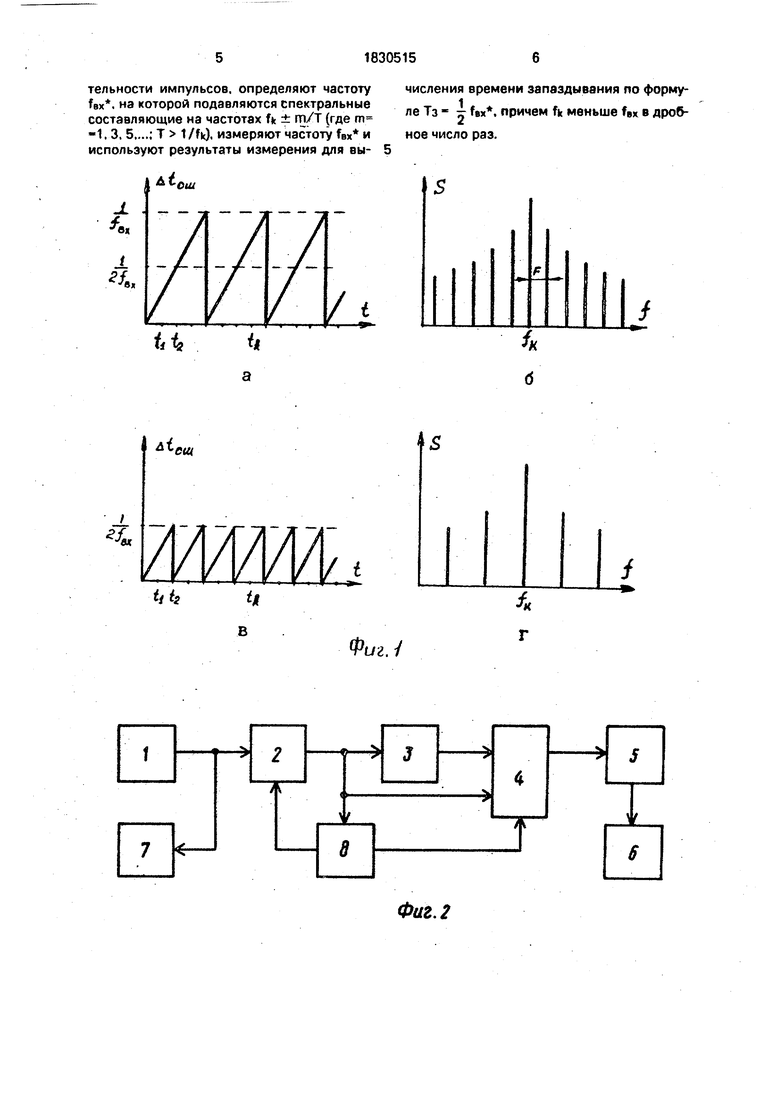
На фиг. 1 изображены функции фазовой модуляции (фиг, 1а,в) и соответствующие им спектры модулируемых сигналов (фиг. 1б,г); на фиг. 2 - пример реализации измерителя на основе делителя с переменным коэффициентом деления (ДПКД); на фиг. 3 - варианты реализации блока управления: на фиг. 4 - пример реализации измерителя на основе накопителя кодов.
Измеритель времени запаздывания элемента задержки по схеме фиг, 2 содержит генератор 1 импульсной последовательности, делитель 2 с переменным коэффициентом деления (ДПКД). элемент 3 задержки, коммутатор 4, триггер 5, анализатор 6 спектра, частотомер 7, блок 8 управления. Блок 8 управления по схеме фиг. За содержит счетчик 9, а о случае выполнения по схеме фиг. 36 - пульт 10 и накопитель 11 кодов.
Измеритель времени запаздывания элемента задержки по схеме фиг. 4 содержит генератор 12 импульсной последовательности, накопитель 13 кода задержки, одноразрядный статистический регистр 15, коммутатор 16, триггер 17, анализатор 18 спектра, частотомер 19, блок20управления.
Способ определения времени запаздывания Тз элемента задержки базируется на следующих положениях:
00
ы о
СП СП
{.Ори введении в сигнал с частотой fk пилообразной фазовой модуляции с периодом Т - -1/F. 1/fk (фиг. 1а) а его спектре присутствуют составляющие на частотах fk ±пР,гдеи°ОН,2.3,...(фигЛб). -5
В соответствии с данным способом частота входной импульсной последовательности fax делится в R или R + 1 раз в зависимости от текущего значения определенным образом сформированного кода уп- 15 равления, в результате чего в спектре выходного квазимеандра появляются дискретные составляющие на частотах fk ± nF, где п - 1,2,3, 4,... (фиг. 1 б}. Часть импульсов полученной таким образом нерегулярной 20 последовательности пропускается через элемент задержки с временем запаздывания Тз. Алгоритм управления и частота fax входных импульсов при этом подбираются таким образом, чтобы неравномерность 25 следования импульсов уменьшилась вдвое, до значения Тз 1/2 fBX. Момент строгого выполнения равенства фиксируется по исчезновению спектральных составляющих с номерами m 1. 3, 5,... (см, фиг. 16). Далее 30 измеряют значение f и по формуле Т 1 /2 fex рассчитывают время запаздывания элемента задержки.
На основе данного способа может быть реализовано несколько вариантов измери- 35 телей (фиг. 2,4).
В одном из них (фиг. 2) дробное давление частоты выполняется делителем 2 с пере менным коэффициентом деления. Деление на R или на R + 1 осуществляется 40 по командам блока 8 управления, в котором формируется двоичный управляющий код
Ky(k) Ь-Qent (U/Q),
О)
где К - номер импульса на выходе ДПКД 2. Давление осуществляется при условии, что код Ky(k) Ky(k-1). В противном случае входная последовательность импульсов делителя в R + 1 раз, Выходной импульс ДПКД 2 поступает на вход триггера 5 непосредственно, если код Курс) Q/2 и через исследуемый элемент 3 задержки, если Ky(k) Q/2. Такой режим прохождения импульсов обеспечивается коммутатором 4, управляемым старшим разрядом кода Ky(k), который формируется в блоке 8 управления.
Блок 8 управления может быть выполнен либо на основе счетчика 9 (фиг. За), либо
O
5 0 5 0
5
0
5
0 5
на основе кодов 11 (фиг. 36). В первом случае L - m, Q - модуль пересчета счетчика 9, код Ky(k) соответствует числу, накопленному в счетчике 9 в k-й момент времени. Если блок 8 управления реализован по схеме, представленной на фиг. 36, то код L, задаваемый с пульта 10, может принимать значения от 1 до Q-1. где Q-емкость накопителя кодов 11, код Ky(k) соответствует числу, накопленному в k-й момент времени в накопителе 11 кодов. В обоих случаях (фиг. За,б) коммутатор А управляется сигналом со старшего разряда счетчика 9 или накопителя 11 кодов,
Во втором варианте измерителя (фиг. 4) дробное деление частоты осуществляется с помощью накопителя 13 кодов, из сигнала переполнения которого и формируется ква-. зимеандр. На вход N-разрядного накопителя 13 кодов в этом случае подается код Q (N/R) ± 1, a N/R - выбирается исходя из требуемой точности измерения запаздывания. В первом приближении точность измерения обратно пропорциональна отношению N/R. Тактирование накопителя 13 кодов осуществляется импульсной последовательностью с частотой fex, где L Ri; Q - код, подаваемый на вход накопителя 13 кодов;
Ky(k) Rik-Qent (Rik/Q),
К - номера импульсов переполнения накопителя 13 кодов. Управление коммутатором 16 осуществляется сигналом старшего разряда кода управления Ky(k), который запоминается в одноразрядном статическом регистре 15. Остальные элементы схемы фиг. 4 выполняют те же функции, что и аналогичные элементы в схеме фиг. 2.
Частота выходного квазимеандра fk и частота F в предлагаемом способе равны
fk 0,5 fBx/(R + L/Q), F - 2 fk L/Q.
Основным преимуществом предлагаемого способа определения времени запаздывания является его высокая точность, которая достигается за счет исключения операции измерения амплитуд спектральных составляющих сформированного сигнала. ,...
Формула изобретения Способ определения времени запаздывания элемента задержки, заключающийся в том, что преобразуют последовательность импульсов с частотой следования fex в последовательность импульсов с временной модуляцией со средней частотой fk, о т л и- чающийся тем, что, с целью повышения точности/изменяют частоту fBX последовательности импульсов, определяют частоту fex. на которой подавляются спектральные составляющие на частотах f ± т/Т (где т -1.3. 5....; Т 1/fk). измеряют частоту fBx и используют результаты измерения для вы-
м1 Г™ ™
4,
л
вд
At
еш
В
числения времени запаздывания по форму1
леТз
ное число раз.
fax, причем fk меньше fB в дроб/«
б
Фиг./
JK
Г
./
от fat ж
ФигЛ
| Способ определения времени задержки неинвертирующих элементов | 1985 |
|
SU1262443A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
