Изобретение относится к автоматическим системам регулирования полета летательного аппарата и может быть использовано для стабилизации заданной высоты полета как пилотируемых, так и на беспилотных летательных аппаратах.
Цель изобретения повышение точности определения заданной высоты полета за счет учета температуры окружающей среды.
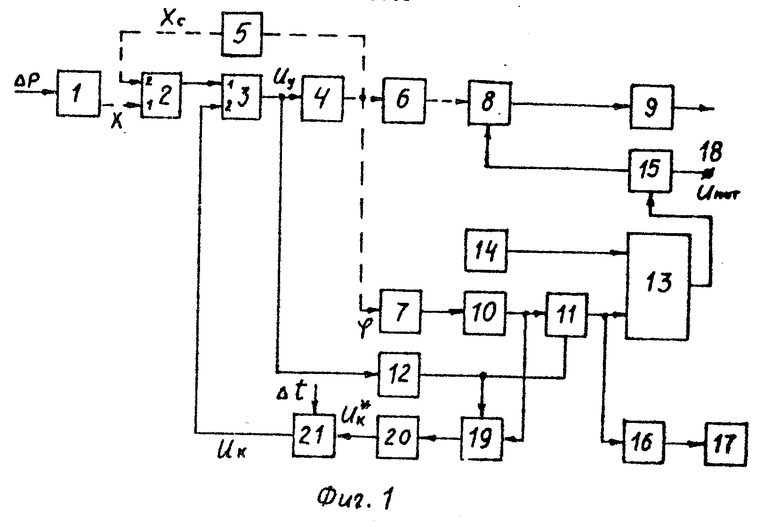
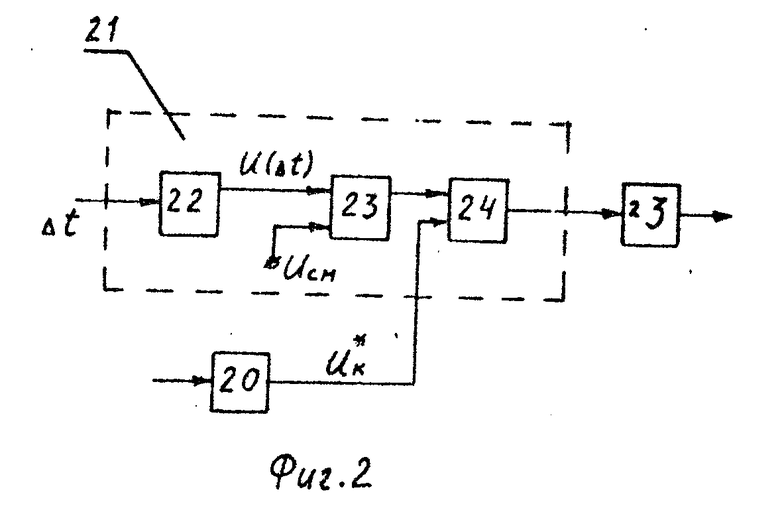
На фиг. 1 представлена блок-схема устройства для стабилизации заданной высоты полета; на фиг. 2 блок-схема блока температурной компенсации и его связи с остальными элементами устройства.
Устройство содержит чувствительный элемент 1 в виде блока мембранных коробок, индуктивный датчик 2, усилитель 3, исполнительный двигатель 4, редукторы 5, 6, 7, электромагнитную муфту 8, потенциометр 9, импульсный модулятор 10, первый счетчик импульсов 11, фазометр 12, компаратор 13, задатчик 14 высоты, ключ 15, дешифратор 16, индикатор 17, вод 18 питания, второй счетчик импульсов 19, цифроаналоговый преобразователь 20, блок температурной компенсации 21. Приняты следующие обозначения:
Uи сигнал, снимаемый с выхода индуктивного датчика 2;
ϕ- угол поворота выходного вала исполнительного двигателя 4;
Uy угол, снимаемый с выхода усилителя 3;
Uk* сигнал, снимаемый с выхода цифроаналогового преобразователя 20;
Uk сигнал, снимаемый с выхода блока температурной компенсации;
Δt изменение температуры окружающей среды;
Uпит напряжения питания устройства.
Блок температурной компенсации (фиг.2) 21 содержит датчик температуры 22, сумматор 23, блок умножения 24. Использованы следующие обозначения:
Uсм напряжение смещения;
U( Δt) сигнал, снимаемый с выхода датчика температуры.
Устройство для стабилизации заданной высоты полета работает следующим образом.
Изменение высоты полета вызывает деформацию чувствительных элементов 1, которая воспринимается индуктивным датчиком 2. С выхода датчика 2 снимается напряжение переменного тока Uи,величина которого зависит от изменения высоты полета, а фаза от направления этого изменения. Этот сигнал усиливается усилителем 3 и подается на управляющую обмотку двигателя 4, который через первый редуктор 5 перемещает статор индуктивного датчика 2 до тех пор, пока статор не займет согласованное положение с ротором, при этом сигнал на выходе индуктивного датчика 2 станет равным нулю. В результате угол поворота ϕ выходного вала исполнительного двигателя 4 оказывается пропорциональным текущей высоте полета. При отключенной электромагнитной муфте 8 щетка потенциометра 9 находится в нейтральном положении, и его выходной сигнал равен нулю. При подаче Uпит включается муфта 8, и движок потенциометрического датчика 9 оказывается через второй редуктор 6 связанным с выходным валом исполнительного двигателя 4, а снимаемое с датчика 9 напряжение будет пропорционально отклонению от той высоты полета, на которой была включена муфта 8.
Вращение вала исполнительного двигателя 4 через третий редуктор 7 передается модулирующему диску импульсного модулятора 10. В результате угол поворота вала двигателя 4, пропорциональный изменению высоты полета, преобразуется в соответствующее число электрических импульсов на выходе импульсного модулятора 10. Причем одному импульсу соответствует вполне конкретное изменение высоты полета, исходя из требуемой точности, что достигается выбором редуктора 7 и соответствующей разбивкой диска модулятора 10. С выхода последнего импульсы поступают на информационный вход первого счетчика импульсов 11. Фаза выходного сигнала индуктивного датчика 2, а следовательно, и выходного сигнала усилителя 3 зависит от знака изменения высоты (набор высоты или снижение). Это изменение фазы преобразуется в фазометре 12 в сигнал, поступающий на управляющий вход первого счетчика 11, и происходит переключение направления счета. При наборе высоты импульсы, поступающие на информационный вход счетчика 11, суммируются, а при уменьшении высоты полета вычитаются.
Сигнал, поступающий с выхода первого счетчика импульсов 11 на один из входов компаратора 13, пропорционален текущей высоте полета летательного аппарата, а сигнал, поступающий с выхода задатчика высоты 14 на другой вход компаратора 13, пропорционален заданной высоте полета.
При достижении заданной высоты полета компаратор 13 выдает импульсный сигнал, который поступает на управляющий вход ключа 15. Последний подключает напряжение питание Uпит на вход управляющей обмотки электромагнитной муфты 8. В результате при появлении отклонения летательного аппарата от заданной высоты полета на выходе потенциометрического датчика 9 появляется сигнал, пропорциональный отклонению летательного аппарата от заданной высоты полета, т. е. устройство начинает работать в режиме стабилизации заданной высоты полета.
При изменении модуля упругости мембранных коробок чувствительного элемента 1, вызванного неизбежным изменением температуры окружающей среды, нарушается обеспечиваемое подбором редуктора 7 и импульсного модулятора 10 соответствие между числом импульсов на выходе первого счетчика 11 и текущей высотой полета ЛА. Точное измерение высоты полета возможно только при наличии компенсатора температурных погрешностей. С этой целью в устройство введена компенсирующая цепь. Температурная коррекция осуществляется следующим образом.
Выходные импульсы модулятора 10, пропорциональные углу ϕ поворота вала исполнительного двигателя 4 поступают на информационный вход второго счетчика импульсов 19, на управляющий вход которого подключен сигнал с выхода фазометра 12, по которому происходит переключение направления счета (так, же как у рассмотренного выше счетчика 11). Число импульсов на выходе счетчика 19 будет пропорционально углу ϕ поворота вала двигателя 4. Этот сигнал преобразуется в аналоговый с помощью цифроаналогового преобразователя 20, с выхода которого на вход блока температурной компенсации 21 поступает соответствующее напряжение
Uk* Kk*. ϕ где Кk* коэффициент пропорциональности.
Коэффициент передачи Кk ( Δ t) блока 10 температурной компенсации 21 зависит от изменения Δ t температуры окружающей среды, а на выходе блока 21 формируется напряжение коррекции
Uk (Δ t) Kk ( Δ t). Uk*
При этом должна выдерживаться следующая настройка:
Kк(Δt)  (T-Tтар)·λ
(T-Tтар)·λ
Здесь Ки коэффициент передачи индуктивного датчика 2;
Kc коэффициент передачи первого редуктора 5;
λ температурный коэффициент изменения модуля упругости (λ < 0);
Т текущая температура окружающей среды (град);
Ттар температура тарировки устройства (град).
В результате на вход исполнительного двигателя 4 через усилитель 3 подается сумма напряжений
Uy Ky(Uи + Uk( Δ t)). где Ky коэффициент передачи усилителя 3.
Причем, когда
Т < Tтар. получаем
Кк( Δ t) > О.
При этом корректирующее напряжение Uк суммируется с выходным напряжением Uи индуктивного датчика, компенсируя тем самым уменьшение показаний устройства по сравнению с действительной высотой полета, которое вызвано увеличением модуля упругости чувствительного элемента 1. В случае, если температура
Т >Ттар получаем
Kk ( Δ t) < 0, и корректирующее напряжение Uk вычитается из сигнала Uи индуктивного датчика 2, уменьшая показания устройства и компенсируя температурную погрешность, вызванную уменьшением модуля упругости чувствительного элемента 1. Когда Т Ттар Uk (Δ t) 0, и устройство работает, как описано выше.
В ходе всего полета с выхода первого счетчика импульсов 11 на вход дешифратора 16 поступает сигнал, соответствующий текущей высоте полета. Дешифратор 16 преобразует его в семисегментный код, поступающий на индикатор 17. Информация о текущей высоте полета, получаемая на индикаторе 17, может быть использована в случае применения устройства на пилотируемом аппарате.
Причем, при
Т Tтар,
Kk (Δ t) < 0,
при
Т > Ттар,
Kk ( Δ t) < 0,
при
Т < Ттар,
Kk ( Δ t) >0.
Подавая сигнал Kk ( Δ t) на один из входов блока умножения 24, на другой вход которого поступает с выхода цифроаналогового преобразователя 20 сигнал Kk*. ϕ на выходе блока 24, который является выходом блока температурной компенсации 21, получают сигнал корректирующего напряжения
Uk( Δ t) Kk ( Δ t) Kk*˙ ϕ
Таким образом, способ стабилизации заданной высоты полета и устройство для его осуществления гарантируют за счет учета температуры окружающей среды увеличение точности вывода летательного аппарата на заданную высоту полета и ее стабилизацию. Причем поставленная цель достигается простым техническим решением с применением общедоступных, надежных в работе элементов с малыми габаритами и энергопотреблением. При этом не требуется вносить никаких конструктивных изменений в используемый в устройстве измеритель высоты, что обеспечивает простую реализацию способа и устройства стабилизации заданной высоты полета летательного аппарата.
Поскольку рассмотренный способ реализации заданной высоты полета и устройство его реализующее не требует вмешательства летчика, устройство может найти применение как на пилотируемых, так и на беспилотных аппаратах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации заданной высоты полета | 1987 |
|
SU1505283A1 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2013 |
|
RU2537124C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА РАДИОУПРАВЛЯЕМОЙ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2319191C1 |
| БОРТОВАЯ СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ДЛЯ УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2338236C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| СПОСОБ И УСТРОЙСТВО ОГРАНИЧЕНИЯ УГЛА АТАКИ И ПЕРЕГРУЗКИ САМОЛЕТА | 2002 |
|
RU2248304C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РУЛЕВЫМ ПРИВОДОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2681823C1 |
| Барометрический высотомер | 1986 |
|
SU1420397A1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280232C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
Изобретение относится к автоматическим системам регулирования полета летательного аппарата и позволяет повысить точность определения заданной высоты за счет учета температуры окружающей среды. В блоке температурной компенсации формируется сигнал Uк(Δt) пропорциональный изменению Δt температуры окружающей среды. Этот сигнал вместе с выходным сигналом индуктивного датчика, пропорциональным изменению высоты полета летательного аппарата, поступает через усилитель к исполнительному двигателю, который через редуктор вращает диск импульсного модулятора, выходные импульсы которого поступают на счетный вход первого счетчика импульсов, отсчитывающего текущую высоту полета. В момент достижения заданной высоты полета компаратор выдает сигнал на срабатывание ключа, подающего питание на электромагнитную муфту. В результате напряжение на выходе потенциометра будет пропорционально отклонению летательного аппарата от заданной высоты полета. 2 с. и 1 з. п. ф-лы, 2 ил.
Uk(Δt)=K·Δt·ϕ
в соответствии с которым корректируют сигнал, пропорциональный изменению высоты полета летательного аппарата, где
K коэффициент пропорциональности;
Δt изменение температуры окружающей среды;
ϕ угол поворота вала исполнительного двигателя.
| Устройство для стабилизации заданной высоты полета | 1987 |
|
SU1505283A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
