Изобретение относится к ракетной технике и предназначено для использования в системах наведения телеуправляемых ракет.
Известен способ телеуправления ракетой, включающий измерение координат цели и ракеты, в каждом канале управления по высоте и направлению формирование опорной траектории наведения ракеты, формирование линейного рассогласования между ракетой и опорной траекторией, формирование пропорциональной этому рассогласованию команды управления ракетой и наведение ракеты на цель по сформированной команде управления ([1], А.А. Лебедев, В.А. Карабанов. Динамика систем управления беспилотными летательными аппаратами. -М.: Машиностроение, 1965, с.327-329).
Недостатком известного способа является то, что формирование линейного рассогласования между ракетой и опорной траекторией осуществляется с использованием заранее заданной (до пуска ракеты) программной функцией, приближенно равной дальности ракеты. При этом параметры траектории наведения ракеты (высота полета, угловая скорость линии визирования цели, команды управления и т.п.) не учитываются, что приводит к ошибкам наведения ракеты. Кроме того, такой способ управления имеет низкую точность наведения ракеты на подвижные цели из-за возникающей динамической ошибки, определяемой параметрами движения цели и инерционностью управления ракетой.
Известен способ телеуправления ракетой, включающий измерение угловых координат и дальностей цели и ракеты, в каждом канале управления по высоте и направлению формирование опорной траектории наведения ракеты, формирование линейного рассогласования между ракетой и опорной траекторией, формирование пропорциональной этому рассогласованию команды управления ракетой и наведение ракеты на цель по сформированной команде управления ([2], Ф.К. Неупокоев. Стрельба зенитными ракетами. -М.: Воениздат, 1980, с.117-120).
В известном способе за счет использования измеренной текущей дальности ракеты повышается точность формирования линейного рассогласования между ракетой и опорной траекторией. Недостатком такого способа является низкая помехозащищенность телеуправления, так как под воздействием естественных и организованных помех возможны прерывания сигнала дальности ракеты, что приведет к размыканию контура телеуправления и срыву наведения ракеты. Кроме того, так как измерение дальности всегда происходит со случайными ошибками, то при этом повышается флуктуационная составляющая ошибки наведения ракеты.
Наиболее близким к предлагаемому является способ телеуправления ракетой, включающий измерение координат цели и ракеты, формирование в функции времени полета ракеты программной дальности и программной скорости ракеты, в каждом канале управления по высоте и направлению формирование опорной траектории наведения ракеты, формирование сигнала линейного рассогласования между ракетой и опорной траекторией, формирование пропорциональной этому сигналу рассогласования команды управления ракетой, формирование сигнала динамической ошибки наведения ракеты относительно опорной траектории, корректирование команды управления ракетой на величину сигнала динамической ошибки наведения ракеты по опорной траектории и наведение ракеты на цель по сформированным командам управления ([1], с.327-329, с.364-371, с.390-395).
В данном способе телеуправления за счет формирования сигнала динамической ошибки наведения ракеты относительно опорной траектории hk(t), определяемого соотношением ([1], с.355-356, с.394)

где K0 - программный коэффициент передачи контура управления ракетой;
F1(t), F2(t) - известные функции времени для данной ракеты, определяемые программными летно-баллистическими функциями ракеты R(t), V(t) (и их первыми производными), приближенно равными соответственно дальности и скорости ракеты,



t - текущее время полета ракеты,
и корректирования команды управления ракетой на величину этого сигнала обеспечивается в основном компенсация систематической динамической ошибки наведения ракеты на подвижные цели. А использование при формировании сигнала линейного рассогласования между ракетой и опорной траекторией h(t), например, по соотношению ([1], с.364)

где φц(t), φ(t) - угловые координаты цели и ракеты соответственно, программной функции R(t) обеспечивается относительная помехозащищенность управления. Вместе с тем использование программных функций R(t), V(t), приближенно равных соответственно дальности и скорости ракеты, приводит к неучету реальной траектории наведения и условий управления ракетой, что снижает точность наведения ракеты.
Кроме того, так как при формировании сигнала динамической ошибки наведения требуется определение производных угловых координат цели, что в условиях измерения зашумленных координат сделать с необходимой точностью практически затруднено, то это влечет за собой появление в командах управления ракетой дополнительных флуктуационных (шумовых) составляющих. А так как для ракеты как объекта управления свойственно низкое демпфирование, то наличие в командах управления шумовых составляющих, особенно на частотах близких к частоте собственных колебаний ракеты, приводит к колебаниям ракеты по углам атаки и, как следствие, к падению скорости ракеты. Это приводит к еще большему несоответствию принятых программных летно-баллистических функций R(t), V(t) реальным дальности и скорости ракеты и к снижению точности наведения ракеты.
Далее, в условиях изменения по времени полета скорости ракеты и ее коэффициента передачи (т.е. располагаемой перегрузки) данный способ обладает погрешностью компенсации динамической ошибки из-за несоответствия заранее заданной программной величины коэффициента передачи K0 реальному значению коэффициента передачи контура управления ракетой.
Указанные недостатки снижают точность и помехозащищенность управления ракетой.
Задачей настоящего изобретения является повышение точности и помехозащищенности телеуправления ракетой.
Поставленная задача решается тем, что в способе телеуправления ракетой, включающем измерение угловых координат и дальностей цели и ракеты, формирование в функции времени полета ракеты программной дальности и программной скорости ракеты, в каждом канале управления по высоте и направлению формирование опорной траектории наведения ракеты, формирование сигнала линейного рассогласования между ракетой и опорной траекторией наведения, формирование пропорциональной этому сигналу рассогласования команды управления ракетой, формирование сигнала динамической ошибки наведения ракеты относительно опорной траектории, корректирование команды управления ракетой на величину сигнала динамической ошибки наведения ракеты по опорной траектории и наведение ракеты на цель по сформированным командам управления, новым является то, что программную дальность и программную скорость ракеты формируют в текущем времени полета ракеты с помощью модели ракеты и с учетом сформированных команд управления ракетой в каждом канале управления, формируют текущий сигнал рассогласования между измеренной дальностью ракеты и программной дальностью ракеты, корректируют с учетом этого рассогласования дальностей программную дальность и программную скорость ракеты, а формирование сигнала линейного рассогласования между ракетой и опорной траекторией наведения и формирование сигнала динамической ошибки наведения ракеты относительно опорной траектории проводят с учетом скорректированных программной дальности и программной скорости ракеты, затем формируют в текущем времени полета ракеты с помощью модели ракеты и с учетом скорректированной программной скорости ракеты текущую программную располагаемую перегрузку ракеты и текущую программную частоту собственных колебаний ракеты и далее последовательно преобразуют текущую скорректированную команду управления ракетой в каждом канале управления пропорционально коэффициенту передачи, изменяющемуся обратно пропорционально текущему значению программной располагаемой перегрузки ракеты, и режекторным фильтром, среднюю частоту полосы задерживания которого задают равной текущему значению программной частоты собственных колебаний ракеты.
В предлагаемом способе телеуправления ракетой модель ракеты задают соотношениями







где m(t) - программное значение массы ракеты;
F(t) - программное значение силы тяги разгонного двигателя ракеты;
mT - масса топлива разгонного двигателя ракеты;
Q - программное значение импульса тяги разгонного двигателя ракеты;
cx, cx0, cxu - программные значения коэффициента лобового сопротивления и его составляющих: коэффициента лобового сопротивления при нулевых углах атаки и коэффициента индуктивного сопротивления соответственно;
Uφ(t), Uq(t) - текущие команды управления ракетой в каналах высоты и направления соответственно;

ρ - программное значение плотности воздуха;
S - площадь миделева сечения ракеты;
φ(t) - угловая координата ракеты в вертикальной плоскости;
g≈9.81 м/с2 - ускорение силы тяжести;
R(t) - программная дальность ракеты;
Д(t) - измеренная дальность ракеты;
V(t) - программная скорость ракеты;
k1, k2 - весовые коэффициенты, значения которых выбираются из условия обеспечения требуемого сглаживания флуктуационной составляющей измеренной дальности ракеты;
nпр(t) - программная располагаемая перегрузка ракеты;




δm - значение максимального угла отклонения рулей;
fпр(t) - программная собственная частота ракеты;
Jz - момент инерции ракеты;
L - характерная длина ракеты;
t - текущее время полета ракеты;
π≈3.14… - число “пи”.
В предлагаемом способе телеуправления ракетой коэффициент передачи Kn(t) определяют по соотношению

где nпр(t) - программная располагаемая перегрузка ракеты;
a - постоянный коэффициент, равный a=δm/g, здесь δm - значение максимального угла отклонения рулей, g≈9.81 м/с2 - ускорение силы тяжести;
t - текущее время полета ракеты.
В предлагаемом способе телеуправления ракетой режекторный фильтр определяют передаточной функцией

где Tp(t) - постоянная времени, определяемая программной частотой собственных колебаний ракеты fпр(t), 
ξp - коэффициент относительного демпфирования, значение которого определяется как наименьшее программное значение коэффициента относительного демпфирования заданной ракеты по условиям полета;
T - постоянная времени, значение которой определяется спектральным составом полезной составляющей команды управления и ее шумовой составляющей;
ξ - постоянный коэффициент, равный ξ=0.7;
t - текущее время полета ракеты;
p - переменная преобразования Лапласа.
Сущность предлагаемого способа заключается в том, что программные дальность и скорость ракеты корректируются в реальном времени управления ракетой по результатам измерения фактической дальности ракеты, реализуемых текущих команд управления ракетой и с подавлением флуктуационной составляющей измеренной дальности, а флуктуационные составляющие команд управления ракетой на частотах, близких к частоте собственных колебаний ракеты, подавляются режекторным фильтром, тем самым уменьшаются колебания ракеты по углам атаки и сохраняются скорость и располагаемая перегрузка ракеты. Одновременно подстройкой коэффициента передачи контура управления в соответствии с текущим изменением коэффициента передачи ракеты (изменениями ее скорости и располагаемой перегрузки) повышается точность компенсации динамической ошибки наведения ракеты.
Предлагаемый способ телеуправления ракетой поясняется следующим образом. В процессе сопровождения цели измеряют ее текущие координаты: угол места φц, азимут qц и дальность Дц. После запуска ракеты измеряют ее текущие координаты: угол места φ, азимут q, дальность Д и далее с учетом координат цели в соответствии с заданным методом наведения формируют в каждой плоскости наведения опорную траекторию наведения в виде закона изменения ее угловой текущей координаты φk, например (для простоты изложения рассматривается один канал управления - по высоте), при наведении ракеты по методу совмещения по соотношению ([1], с.364-365)

Одновременно по соотношениям (4)-(8) модели ракеты формируют в текущем времени полета ракеты программную дальность R(t), программную скорость V(t) ракеты и их производные.
Соотношения, задающие модель ракеты основаны на известных выражениях динамики полета ракет: соотношение (4) - уравнение для массы ракеты, соотношения (5) и (6) - уравнение для скорости ([3], А.А. Лебедев, Л.С. Чернобровкин. Динамика полета. - М.: Оборонгиз, 1962, с.430), соотношение (9) для располагаемой перегрузки ([3], с.349, с.154), соотношение (10) для частоты собственных колебаний ([3], с.509). Соотношения (7) и (8) модели представляют собой уравнения оценки программной дальности и программной скорости с учетом измеренной дальности ракеты, основанные на результатах калмановской фильтрации ([4], М.В. Максимов, Г.И. Горгонов. Радиоэлектронные системы самонаведения. - М.: Радио и связь, 1982, с.173-183). Числовые программные значения коэффициентов, входящих в модель ракеты, определяются на этапах проектирования и испытания ракеты и хранятся в памяти ее системы управления.
При наличии измерений дальности ракеты Д(t) формируют в соответствии с соотношениями (7)-(8) текущий сигнал рассогласования между измеренной дальностью ракеты и программной дальностью ракеты Д(t)-R(t), которым с весовыми коэффициентами k1, k2 корректируют соответственно текущие программную дальность R(t) и программную скорость V(t) ракеты. Значения весовых коэффициентов k1, k2 в этом случае задают из условия обеспечения требуемого сглаживания флуктуационной составляющей измеренной дальности ракеты. Формирование программного продольного ускорения ракеты 
При отсутствии или прерывании процесса измерения дальности ракеты Д(t) коэффициенты k1, k2 обнуляют, т.е. k1=0 и k2=0. В таком случае соотношения (7)-(8) модели ракеты формируют экстраполированные значения программной дальности R(t) и программной скорости V(t), чем и обеспечивается точность и помехозащищенность управления ракетой.
Далее с учетом скорректированных программной дальности R(t) и программной скорости V(t) формируют в соответствии с соотношением (3) сигнал текущего линейного рассогласования между ракетой и опорной траекторией наведения h(t) и в соответствии с соотношениями (1)-(2) текущий сигнал динамической ошибки наведения ракеты относительно опорной траектории hk(t). Затем формируют пропорционально сигналу линейного рассогласования между ракетой и опорной траекторией наведения h(t) команду управления ракетой, например, в соответствии с соотношением ([1], с.370)

где Tk - весовой коэффициент, учитывающий производную сигнала линейного рассогласования в законе управления.
Значения коэффициентов K0 и Tk определяются при анализе устойчивости замкнутого контура управления ракетой исходя из требований по обеспечению его запасов устойчивости.
Далее корректируют команду управления Uk(t), пропорциональную линейному рассогласованию, на величину сигнала динамической ошибки наведения ракеты по опорной траектории hk(t) путем их пропорционального вычитания

Одновременно по соотношениям (9) и (10) модели ракеты с учетом скорректированной программной скорости ракеты V(t) формируют в текущем времени полета ракеты текущую программную располагаемую перегрузку ракеты nпр(t) и текущую программную частоту собственных колебаний ракеты fпр(t). Затем преобразуют текущую скорректированную команду управления ракетой Ukk(t) в каждом канале управления пропорционально коэффициенту передачи Kn(t), изменяющемуся обратно пропорционально текущему значению программной располагаемой перегрузки ракеты nпр(t), т.е.

Коэффициент Kn(t) определяется соотношением (11), которое получается следующим образом. Располагаемая перегрузка ракеты равна ([1], с.105-106)

где K - передаточный коэффициент ракеты, характеризующий ее маневренность;
V - скорость ракеты.
Произведение сомножителей KV в соотношение (17) определяет передаточный коэффициент ракеты по нормальному ускорению (перегрузке), равный

пропорционально которому по времени полета ракеты фактически изменяется коэффициент передачи контура управления ракетой. Поэтому при преобразовании команд управления обратно пропорционально коэффициенту KV, т.е. пропорционально коэффициенту передачи Kn(t) в соответствии с соотношением (11), коэффициент передачи контура управления ракетой будет независимым от переменной маневренности ракеты, т.е. его значение будет постоянным с точностью до погрешности знания располагаемой перегрузки ракеты [nпр(t)≈nрасп(t)], что благоприятно сказывается на запасах устойчивости контура управления и соответственно на точности наведения ракеты.
Далее полученную после преобразования (16) команду управления ракетой 

где Uφ(p) - сформированная команда управления ракетой;

WРФ(p) - передаточная функция режекторного фильтра.
Параметры передаточной функции режекторного фильтра, определяемой соотношением (12), выбирают следующим образом:
Tp(t) - постоянная времени определяется средней частотой полосы задерживания режекторного фильтра (частотой режекции), которую задают равной текущей программной частоте собственных колебаний ракеты fпр(t), т.е. 
ξp - коэффициент относительного демпфирования, значение которого задают равным наименьшему программному (ожидаемому) значению коэффициента относительного демпфирования заданной ракеты по условиям полета;
T - постоянная времени, значение которой задают исходя из анализа спектрального состава полезной составляющей команды управления и ее шумовой составляющей;
ξ - коэффициент относительного демпфирования, значение которого задают равным значению желательного коэффициента относительного демпфирования последовательных динамических звеньев “режекторный фильтр-ракета”, ξ=0.7.
Программное значение коэффициента относительного демпфирования заданной ракеты по условиям полета определяют, например, по соотношениям, приведенным в [1], с.108.
Указанное задание параметров режекторного фильтра обеспечивает поддержание соответствия между его полосой задерживания и частотой собственных колебаний ракеты, поэтому в командах управления отсутствуют (или ослабляются) составляющие на частотах, равных или близких к частоте собственных колебаний ракеты, что исключает (или уменьшает) влияние низкого собственного демпфирования ракеты на скорость ее полета, располагаемую перегрузку и соответственно повышает точность наведения. Кроме того, так как в числителе передаточной функции режекторного фильтра (12) стоит звено, динамические свойства которого совпадают (или близки) с динамическими свойствами звена, стоящего в знаменателе передаточной функции ракеты ([1], с.112), то при преобразовании команд управления таким режекторным фильтром в процессе управления происходит компенсация инерционности ракеты как объекта управления и стабилизация фазовой характеристики контура управления ракетой, что также повышает устойчивость и точность наведения ракеты.
Задания частотного диапазона работы режекторного фильтра поясняется фиг.1, на которой обозначено:
f - частотная ось;
АЧХ - амплитудная частотная характеристика режекторного фильтра;
f0 - средняя частота полосы задерживания (частота режекции);
fпр - программная частота собственных колебаний ракеты;
Δf - полоса задерживания режекторного фильтра.
Предлагаемый способ телеуправления ракетой может быть реализован системой управления, функциональная схема которой представлена на фиг.2 (схема приведена для одного канала управления).
Система управления содержит пеленгатор цели (ПЦ) 1, блок модели ракеты (MP) 2 и контур управления ракетой, включающий последовательно соединенные пеленгатор ракеты (ПР) 3, блок формирования опорной траектории и линейного рассогласования между ракетой и опорной траекторией наведения (ЛО) 4, блок формирования команды управления ракетой, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения (ФК) 5, сумматор (С) 6, усилитель с переменным коэффициентом (У) 7, режекторный фильтр с регулируемой средней частотой полосы задерживания (РФ) 8, передатчик команд управления на ракеты (ПК) 9 и ракету (Р) 10, а также блок формирования сигнала динамической ошибки (КДО) 11.
Элементы пеленгатор цели 1, пеленгатор ракеты 3, блок формирования опорной траектории формирования и линейного рассогласования 4, блок формирования команды управления ракетой 5, сумматор 6, передатчик команд управления 9 и блок формирования сигнала динамической ошибки 11 представляют собой известные штатные элементы системы управления ракетой ([1], стр.129-130).
Блок модели ракеты 2, усилитель с переменным коэффициентом 7 и режекторный фильтр с регулируемой средней частотой полосы задерживания 8 могут быть выполнены в виде счетно-решающих схем, например, на базе операционных усилителей ([3], И.М. Тетельбаум, Ю.Р. Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987, с.42-43, 92, 125).
Система управления, реализующая предлагаемый способ телеуправления ракетой, также может быть выполнена с использованием типовых элементов цифровой вычислительной техники.
Система работает следующим образом. Пеленгатор цели 1 осуществляет сопровождение цели и измерение ее угловых координат и дальности. Пеленгатор ракеты 3 осуществляет захват ракеты на сопровождение и измерение ее угловых координат и дальности. Измеренные угловая координата ракеты и дальность ракеты с выходов блока 3 поступают соответственно на первые входы блока формирования опорной траектории и линейного рассогласования между ракетой и опорной траекторией 4, на второй вход которого поступает угловая координата цели с выхода блока 1, и блока модели ракеты 2. В блоке 2 с учетом корректировки по измеренной дальности ракеты и с учетом текущей команды управления, поступающей на его второй вход, в соответствии с соотношениями (4)-(10) модели ракеты формируют программную дальность, программную скорость ракеты и их первые производные, которые поступают далее соответственно на второй, третий, четвертый и пятый входы блока формирования сигнала динамической ошибки 11, на первый вход которого поступает угловая координата цели с выхода пеленгатора цели 1. Сформированный, в соответствии с соотношениями (1) и (2), сигнал динамической ошибки с блока 11 поступает на второй вход сумматора 6. Программная дальность ракеты с первого выхода блока модели ракеты 2 также поступает на третий вход блока формирования опорной траектории и линейного рассогласования между ракетой и опорной траекторией 4. Далее пропорционально сформированному сигналу линейному рассогласованию формируют в блоке 5 команду управления ракетой, которая поступает на первый вход сумматора 6, где происходит ее корректировка на величину сигнала динамической ошибки.
Скорректированная команда управления поступает далее в усилитель с переменным коэффициентом 7, на второй вход которого с шестого выхода блока модели 2 поступает сигнал программной перегрузки ракеты. Усилитель 7 преобразует команду управления обратно пропорционально значению программной перегрузки и далее команда управления поступает на режекторный фильтр, на второй ход которого с пятого выхода блока модели 2 поступает сигнал программной частоты собственных колебаний ракеты. Режекторный фильтр преобразует команду управления, удаляя (ослабевая) ее составляющие на частотах близких к частоте собственных колебаний ракеты. Далее посредством передатчика команд 9 команды управления передается на ракету 10. Ракета, отрабатывая команды, наводится на цель.
Сформированные таким образом команды управления обеспечивают повышение точности и помехозащищенности телеуправления ракетой, что выгодно отличает предлагаемое техническое решение от известных.
Источники информации
1. А.А. Лебедев, В.А. Карабанов. Динамика систем управления беспилотными летательными аппаратами. -М.: Машиностроение, 1965.
2. Ф.К. Неупокоев. Стрельба зенитными ракетами. -М.: Воениздат, 1980.
3. А.А. Лебедев, Л.С. Чернобровкин. Динамика полета. - М.: Оборонгиз, 1962.
4. М.В. Максимов, Г.И. Горгонов. Радиоэлектронные системы самонаведения. - М.: Радио и связь, 1982.
5. И.М. Тетельбаум, Ю.Р. Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2437052C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2014 |
|
RU2559373C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2009 |
|
RU2426969C2 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| СПОСОБ ИСПЫТАНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2190184C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2406067C1 |

Изобретение относится к ракетной технике и может быть использовано в системах наведения телеуправляемых ракет. Технический результат - повышение точности и помехозащищенности телеуправления ракетой. Способ включает измерение угловых координат и дальностей цели и ракеты, формирование в функции времени полета ракеты программной дальности и программной скорости ракеты, формирование опорной траектории наведения ракеты, формирование сигнала линейного рассогласования между ракетой и опорной траекторией наведения, формирование пропорциональной этому сигналу рассогласования команды управления ракетой, формирование сигнала динамической ошибки наведения ракеты относительно опорной траектории, корректирование команды управления ракетой на величину сигнала динамической ошибки наведения ракеты по опорной траектории. Новым является то, что программную дальность и программную скорость ракеты формируют в текущем времени полета ракеты с помощью модели ракеты и с учетом сформированных команд управления ракетой, формируют текущий сигнал рассогласования между измеренной дальностью ракеты и программной дальностью ракеты, корректируют с учетом этого рассогласования дальностей программную дальность и программную скорость ракеты, а формирование сигнала линейного рассогласования между ракетой и опорной траекторией и формирование сигнала динамической ошибки наведения ракеты относительно опорной траектории проводят с учетом скорректированных программной дальности и программной скорости ракеты, далее формируют с помощью модели ракеты и с учетом скорректированной программной скорости ракеты текущую программную располагаемую перегрузку ракеты и текущую программную частоту собственных колебаний ракеты и затем последовательно преобразуют текущую команду управления ракетой пропорционально коэффициенту передачи, изменяющемуся обратно пропорционально текущему значению программной располагаемой перегрузки ракеты, и режекторным фильтром, среднюю частоту полосы задерживания которого задают равной текущему значению программной частоты собственных колебаний ракеты. № ЗюП. Ф-лы, 2 ил.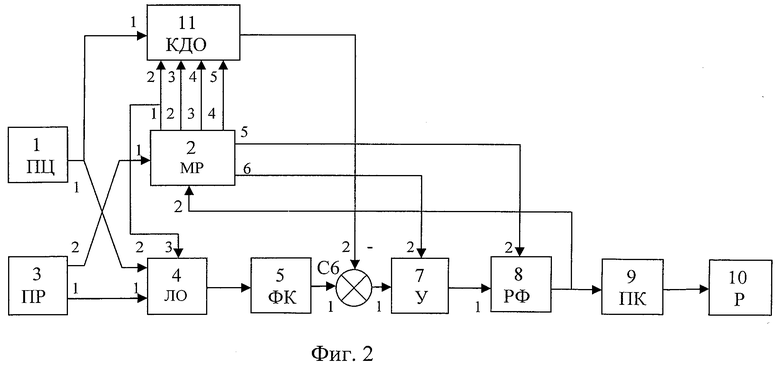
1. Способ телеуправления ракетой, включающий измерение угловых координат и дальностей цели и ракеты, формирование в функции времени полета ракеты программной дальности и программной скорости ракеты, в каждом канале управления по высоте и направлению формирование опорной траектории наведения ракеты, формирование сигнала линейного рассогласования между ракетой и опорной траекторией наведения, формирование пропорциональной этому сигналу рассогласования команды управления ракетой, формирование сигнала динамической ошибки наведения ракеты относительно опорной траектории, корректирование команды управления ракетой на величину сигнала динамической ошибки наведения ракеты по опорной траектории и наведение ракеты на цель по сформированным командам управления, отличающийся тем, что программную дальность и программную скорость ракеты формируют в текущем времени полета ракеты с помощью модели ракеты и с учетом сформированных команд управления ракетой в каждом канале управления, формируют текущий сигнал рассогласования между измеренной дальностью ракеты и программной дальностью ракеты, корректируют с учетом этого рассогласования дальностей программную дальность и программную скорость ракеты, а формирование сигнала линейного рассогласования между ракетой и опорной траекторией наведения и формирование сигнала динамической ошибки наведения ракеты относительно опорной траектории проводят с учетом скорректированных программной дальности и программной скорости ракеты, затем формируют в текущем времени полета ракеты с помощью модели ракеты и с учетом скорректированной программной скорости ракеты текущую программную располагаемую перегрузку ракеты и текущую программную частоту собственных колебаний ракеты и далее последовательно преобразуют текущую скорректированную команду управления ракетой в каждом канале управления пропорционально коэффициенту передачи, изменяющемуся обратно пропорционально текущему значению программной располагаемой перегрузки ракеты, и режекторным фильтром, среднюю частоту полосы задерживания которого задают равной текущему значению программной частоты собственных колебаний ракеты.
2. Способ по п.1, отличающийся тем, что модель ракеты задают соотношениями





где m(t) - программное значение массы ракеты;
F(t) - программное значение силы тяги разгонного двигателя ракеты;
mT - масса топлива разгонного двигателя ракеты;
Q - программное значение импульса тяги разгонного двигателя ракеты;
cx, cx0, cxu - программные значения коэффициента лобового сопротивления и его составляющих: коэффициента лобового сопротивления при нулевых углах атаки и коэффициента индуктивного сопротивления соответственно;
Uφ(t), Uq(t) - текущие команды управления ракетой в каналах высоты и направления соответственно;

ρ - программное значение плотности воздуха;
S - площадь миделева сечения ракеты;
φ(t) - угловая координата ракеты в вертикальной плоскости;
g≈9.81 м/с2 - ускорение силы тяжести;
R(t) - программная дальность ракеты;
Д(t) - измеренная дальность ракеты;
V(t) - программная скорость ракеты;
k1, k2 - весовые коэффициенты, значения которых выбираются из условия обеспечения требуемого сглаживания флуктуационной составляющей измеренной дальности ракеты;
nпр(t) - программная располагаемая перегрузка ракеты;




δm - значение максимального угла отклонения рулей;
fпр(t) - программная собственная частота ракеты;
Jz - момент инерции ракеты;
L - характерная длина ракеты;
t - текущее время полета ракеты;
π≈3.14… - число “пи”.
3. Способ по п.1, отличающийся тем, что коэффициент передачи Kn(t), определяют по соотношению
где nпр(t) - программная располагаемая перегрузка ракеты;
a - постоянный коэффициент, равный a=δm/g, здесь δm - значение максимального угла отклонения рулей, g≈9.81 м/с2 - ускорение силы тяжести;
t - текущее время полета ракеты.
4. Способ по п.1, отличающийся тем, что режекторный фильтр определяют передаточной функцией
где Tp(t)- постоянная времени, определяемая программной частотой собственных колебаний ракеты fпр(t),
ξp - коэффициент относительного демпфирования, значение которого определяется как наименьшее программное значение коэффициента относительного демпфирования заданной ракеты по условиям полета;
T - постоянная времени, значение которой определяется спектральным составом полезной составляющей команды управления и ее шумовой составляющей;
ξ - постоянный коэффициент, равный ξ=0.7;
t - текущее время полета ракеты;
p - переменная преобразования Лапласа.
| A.A.ЛЕБЕДЕВ, В.А.КАРАБАНОВ | |||
| Динамика систем управления беспилотными летательными аппаратами | |||
| - М.: Машиностроение, 1965, с.327-330 | |||
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2406067C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| Ф.К | |||
| НЕУПОКОЕВ | |||
| Стрельба зенитными ракетами | |||
| - М.: Военное издательство, 1991, c/ 117-120 | |||
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |

