Изобретение относится к следующим системам и может быть использовано в различных устройствах автоматики в качестве исполнительных следящих систем.
Сущность изобретения таким образом, состоит втом, что при изменении знака скорости задающего воздействия второй релейный элемент включен с момента изменения знака заданной скорости до тех пор, пока рассогласование не изменит свой знак и, следовательно, текущая скорость по абсолютному значению не превысит заданную, в то время как в системе-прототипе релейный элемент включается только когда знаки текущей скорости и заданной совпадут, следовательно, реверсирование двигателя будет происходить более интенсивно, повысятся быстродействие и динамическая точность.
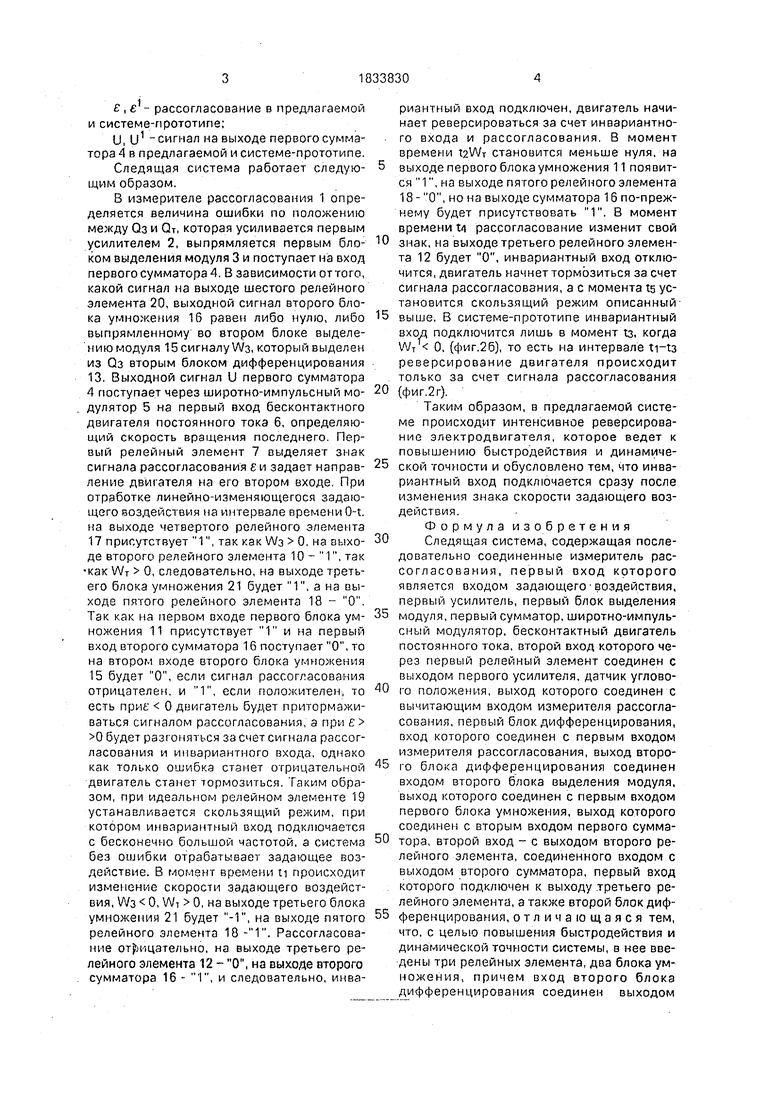
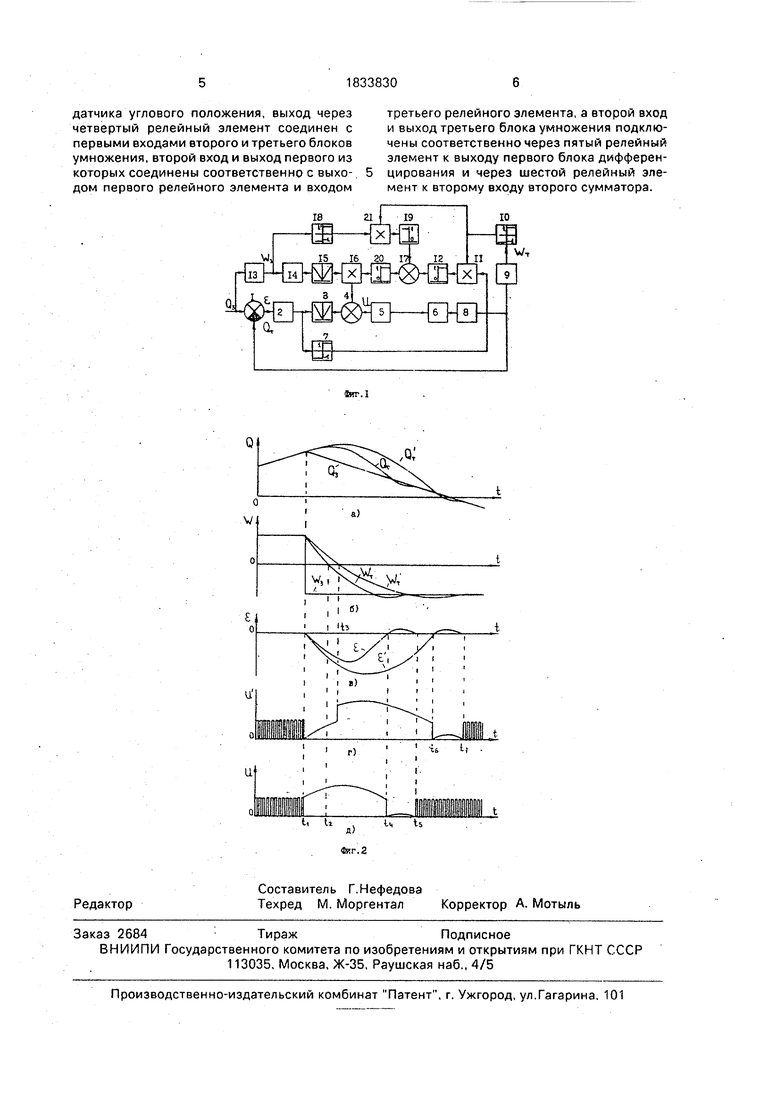
На фиг. 1 изображена структурная схема предлагаемой следящей системы; на фиг. 2 - эпюры основных координат системы- прототипа заявляемой при отработке пилообразного входного сигнала.
Система содержит измеритель рассогласования 1, усилитель 2, первый блок выделения модуля 3, первый сумматор 4, широтно-импульсный модулятор 5, бесконтактный двигатель постоянного тока 6, первый релейный элемент 7, датчик углового положения 8, второй блок дифференцирования 9, четвертый релейный элемент 10. второй блок умножения 11, третий релейный блок 12, первый блок дифференцирования 13, второй блок выделения модуля 14, второй блок умножения 15, второй сумматор 16, пятый релейный элемент 17, шестой релейный элемент 18, второй релейный элемент 19. третий блок умножения 20.
В тексте описания приняты следующие условные обозначения и сокращения:
бз - задающее воздействие;
QT, От - выходной угол в предлагаемой и системе-прототияе;
Л/з - производная от задающего воздействия; f
WT, WT - производная от выходного угла в предлагаемой и системе-прототипе;
to
р
СА 00 СА)
Ј,Ј1- рассогласование в предлагаемой и системе-прототипе;
U, U1 сигнал на выходе первого сумматора 4 в предлагаемой и системе-прототипе.
Следящая система работает следующим образом.
В измерителе рассогласования 1. определяется величина ошибки по положению между Оз и От, которая усиливается первым усилителем 2, выпрямляется первым блоком выделения модуля 3 и поступает на вход первого сумматора 4. В зависимости оттого, какой сигнал на выходе шестого релейного элемента 20, выходной сигнал второго блока умножения 16 равен либо нулю, либо выпрямленному во втором блоке выделе- нию модуля 15 сигналу Ws, который выделен из Оз вторым блоком дифференцирования 13. Выходной сигнал U первого сумматора 4 поступает через широтно-импульсный модулятор 5 на первый вход бесконтактного двигателя постоянного тока 6, определяющий скорость вращения последнего. Первый релейный элемент 7 выделяет знак сигнала рассогласования е и задает направление двигателя на его втором входе. При отработке линейно-изменяющегося задающего воздействия на интервале времени 0-t. на выходе четвертого релейного элемента 17 присутствует 1, так как Ws 0, на выходе второго релейного элемента 10 - 1, так как WT 0, следовательно, на выходе третьего блока умножения 21 будет 1, а на выходе пятого релейного элемента 18 - О. Так как на первом входе первого блока умножения 11 присутствует 1 и на первый вход второго сумматора 16 поступает О, то на втором входе второго блока умножения 15 будет О, если сигнал рассогласования отрицателен, и 1, если положителен:, то есть прие 0 двигатель будет притормаживаться сигналом рассогласования, а при Ј 0 будет разгоняться зз счет сигнала рассогласования и инвариантного входа, однако как только ошибка станет отрицательной двигатель станет тормозиться. Таким образом, при идеальном релейном элементе 19 устанавливается скользящий режим, при котором инвариантный вход подключается с бесконечно большой частотой, а система без ошибки отрабатывает задающее воздействие. В момент времени ц происходит изменение скорости задающего воздействия, Л/з О, WT 0, на выходе третьего блока умножений 21 будет -1, на выходе пятого релейного элемента 18 . Рассогласование отрицательно, на выходе третьего релейного элемента 12 - О, на выходе второго сумматора 16 - 1, и следовательно, инвариантный вход подключен, двигатель начинает реверсироваться за счет инвариантного входа и рассогласования. В момент времени taWT становится меньше нуля, на
выходе первого блока умножения 11 появится 1, на выходе пятого релейного элемента 18 - О, но на выходе сумматора 16 по-прежнему будет присутствовать 1. В момент времени tn рассогласование изменит свой
знак, на выходе третьего релейного элемента 12 будет О, инвариантный вход отключится, двигатель начнет тормозиться за счет сигнала рассогласования, а с момента ts установится скользящий режим описанный5 выше. В системе-прототипе инвариантный вход подключится лишь в момент хз, когда WT 0, (фиг.2б), то есть на интервале ti-t3 реверсирование двигателя происходит только за счет сигнала рассогласования
0 (фИГ.2г).
Таким образом, в предлагаемой системе происходит интенсивное реверсирование электродвигателя, которое ведет к повышению быстродействия и динамиче5 ской точности и обусловлено тем, что инвариантный вход подключается сразу после изменения знака скорости задающего воздействия.
Формула изобретен и я
0Следящая система, содержащая последовательно соединенные измеритель рассогласования, первый сход которого является входом задающего-воздействия, первый усилитель, первый блок выделения
5
0
модуля, первый сумматор, широтно-импульсный модулятор, бесконтактный двигатель постоянного тока, второй вход которого через первый релейный элемент соединен с выходом первого усилителя, датчик углового положения, выход которого соединен с вычитающим входом измерителя рассогласования, первый блок дифференцирования, вход которого соединен с первым входом измерителя рассогласования, выход второ5 го блока дифференцирования соединен входом второго блока выделения модуля, выход которого соединен с первым входом первого блока умножения, выход которого соединен с вторым входом первого сумма0 тора, второй вход - с выходом второго релейного элемента, соединенного входом с выходом второго сумматора, первый вход которого подключен к выходу третьего релейного элемента, а также второй блок диф5 ференцирования, отличающаяся тем, что, с целью повышения быстродействия и динамической точности системы, в нее введены три релейных элемента, два блока умножения, причем вход второго блока дифференцирования соединен выходом
датчика углового положения, выход через четвертый релейный элемент соединен с первыми входами второго и третьего блоков умножения, второй вход и выход первого из которых соединены соответственно с выхо-. дом первого релейного элемента и входом
третьего релейного элемента, а второй вход и выход третьего блока умножения подключены соответственно через пятый релейный элемент к выходу первого блока дифференцирования и через шестой релейный элемент к второму входу второго сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1990 |
|
SU1805446A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Следящая система | 1978 |
|
SU763851A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Следящий электропривод | 1987 |
|
SU1446600A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
Изобретение относится к следящим системам и может быть использовано в различных устройствах автоматики в качестве исполнительных следящих систем. Целью изобретения является повышение быстродействия и динамической точности. Следящая система содержит измеритель рассогласования, усилитель, два блока выделения модуля, два сумматора, широтно- имлульсный модулятор, бесконтактный двигатель постоянного тока, датчик угла, пять релейных элементов, три блока умножения, два блока дифференцирования. 2 ил.
18
ю
| Бесконтактный следящий электропривод постоянного тока | 1972 |
|
SU463097A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
