4 4ib
00 4
00
Изобретение относится к автоматик и может быть использовано в различных щ)ецизионных цифровых системах регулирования и управления.
Целью изобретения является умень- шение времени отработки рассогласования и повьшение на,цежности следящей системы.
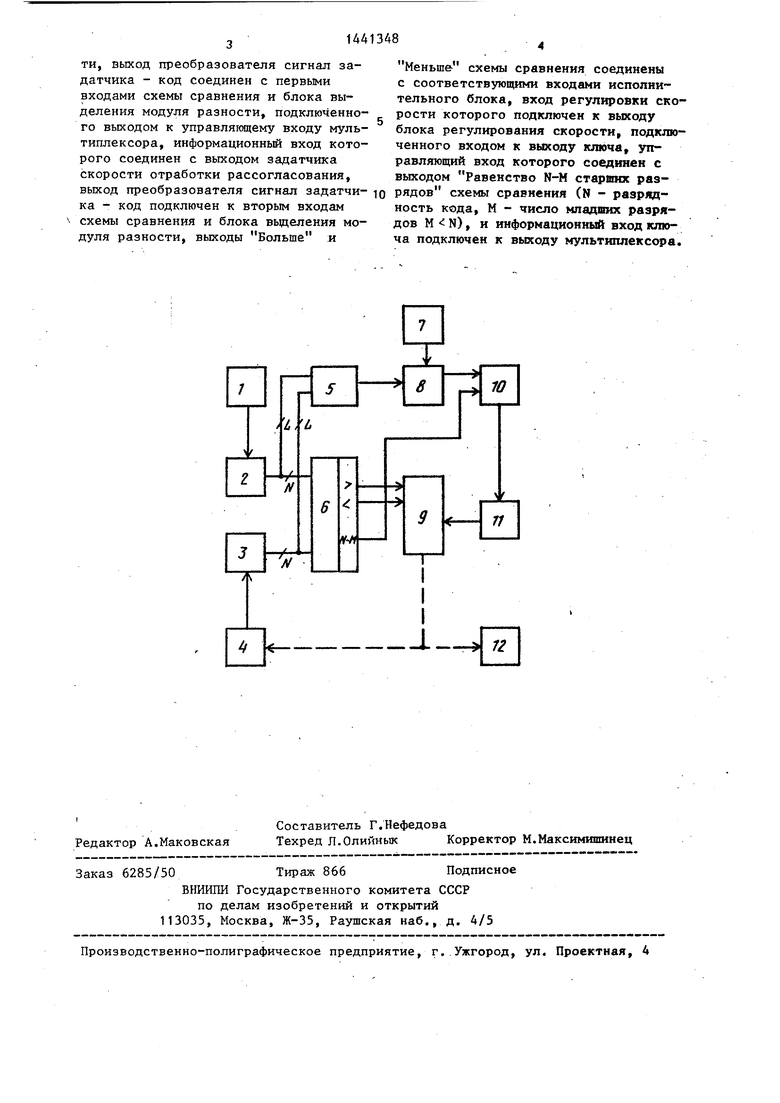
На чертеже представлена функцио- нальная схема описываемой системы.
Цифровая следящая система содержит задатчик 1, преобразователь 2 сигнал зада/гчижа - код, преобразователь 3 сигнал датчика - код, дат- чик 4, блок 5 вьщеления модуля разности, схему 6 сравнения, задатчик 7 скорости отработки, мультиплексор 8, исполнительный блок 9, ключ 10, блок :t 1 регулирования скорости отработки и объект 12.Задатчик 1 соединен с выходом N-разрядного преобразователя 2 сигна задатчика - код, выходы которого соединены с первыми входами N-разрядной схемы 6 сравнения. Из М младших разрядов N-разрядного числа Ь старших разрядов одновременно подаются на входы L-разрядного блока 5 вьщеления модуля разности. Датчик 4 соединен с входом N-разрядного преобразовател 3 сигнал датчика - код, выходы которого соединены с вторыми входами N-разрядной схемы 6 сравнения, одновременно из М младших разрядов аз- рядного числа L старпгих разрядов по даются на вторые входы L-разрядного блока 5 вьщеления модуля разности.
Система работает следующим образом.
При равенстве всех разрядов, поступающих с преобразователей сигналов датчика и задатчика, объект не перемещается, а при неравенстве Ng и N работа устройства определяется величиной рассогласования. Из N-разрядного числа выбирается М таких младшкх разрядов, что если модуль рассогласования не превьшает 2, то используются пониженные скорости отработки рассогласования, которые определяются задатчиком 7, при пре- вьшении модуля рассогласования 2 - максимальная скорость отработки.
С целью упрощения схемы устройства возможно использование не всех М младших разрядов N-разрядного числа, а только L старших разрядов М-разрядного числа.
Q
0
5 о
0
5
0
Если модуль рассогласования пре вышает , то блок 5 не оказывает влияния на работу системы, так как ключ 10 закрыт и сигнал на блок 11 регулирования скорости не проходит. Отработка рассогласования производится с максимальной скоростью. Направление, отработки определяется сигналами Больше и Меньше, поступающими из схемы 6 сравнения на входы исполнительного блока 9.
Если модуль рассогласования не превышает , то сигнал, поступающий с выхода Равенство старших N-M разрядов схемы б сравнения, открывает ключ 10. В блоке 5 вычисляется модуль разности нвукцу L разрядами значений датчика и задатчика, которьй используется для управления работой 2 канального мультиплексора 8.
N М / L
Коммутируя определенным образом выходы за,цатчика 7 скорости отработки и информационные входы мультиплексора Sj задается дискретный закон изменения скорости отработки от величины рассогласования, По мере отработки рассогласования происходит последовательное переключение входов мультиплексора 8. Сигнал задатчика 7 скорости отработки через мультиплексор 8 и ключ to поступает на вход блока 11 регулирования скоро- стио Скорость отработки снижается от максимальной до минимальной, а при разности Ng и N, не превьшюющей по модулю происходит отработка с минимальной скоростью.
Формула изобретения
Цифровая следящая система, содержащая задатчикэ выход которого соединен с входом преобразователя сигнал задатчика код., исполнительный блок, кинематически связанный с объектом и датчиком положения, .выход которого соединен с. входом преобразователя сигнал датчшса - код, отличающаяся тем, что, с целью снижения времени отработки и повьшения надежности системы, в нее введены схема сравнения} блок выделения модуля разности, мультиплексор,. ключ, задатчик скорости отработки рассогласования и блок регулирования скороети, выход преобразователя сигнал за- датчика - код соединен с первыми входами схемы сравнения и блока выделения модуля разности, подключенного выходом к управляющему входу мультиплексора, информационный вход которого соединен с выходом задатчика скорости отработки рассогласования.
выход преобразователя сигнал задатчи- ю рядов схемы сравнения (N - разрядка - код подключен к вторым входам схемы сравнения и блока вьщеления модуля разности, выходы Больше к
ность кода, М - число младших разрядов ), и информационный вход клю ча подключен к выходу мультиплексора
Меньше схемы сравнения соединены с соответствующими входами исполнительного блока, вход регулировки ско рости которого подключен к выходу блока регулирования скорости, подключенного входом к выходу ключа, управляющий вход которого соединен с выходом Равенство N-M старших разрядов схемы сравнения (N - разрядность кода, М - число младших разрядов ), и информационный вход ключа подключен к выходу мультиплексора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Следящая система | 1982 |
|
SU1121647A1 |
| Устройство управления позиционированием | 1987 |
|
SU1462248A1 |
| Следящая система | 1979 |
|
SU930234A1 |
| Цифровая следящая система | 1979 |
|
SU868700A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Цифровая следящая система | 1979 |
|
SU840795A1 |
| Способ стабилизации напряжения или тока | 1985 |
|
SU1288663A1 |
| Цифровой следящий привод | 1980 |
|
SU941926A1 |
Изобретение относится к автома- тшсе и может быть использовано в различных прецизионных цифровых системах регулирования и управления. Целью изобретения является уменьшение времени отработки рассогласования и повьшение надежности следящей системы. Предлагаемая следящая система содержит задатчик, датчик, N-разрядные преобразователи сигнал - код, N-pas- рядную схему сравнения, L-разрядную схему вьщеления модуля разности, 2- канапьный мультиплексор, задатчик скорости отработки рассогласования, схему регулирования скорости отработки. В предлагаемой следящей системе количество разрядов, используемых для изменения скорости отработки, ограничено, что приводит к упрощению и повьшению надежности системы в Целом. 1 ил. (Л с
| Муттер В.М | |||
| Аналого-цифровые следящие системы | |||
| Л.: Энергия, 1974, с.312 | |||
| Устройство для приведения объекта в заданное положение | 1978 |
|
SU706820A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
