Изобретение относится к приводам подъемных механизмов в частности автогидроподъемников, и может быть использовано в подъемно-транспортном машиностроении.
Цель изобретения - уменьшение габаритов подъемника в транспортном положении, упрощение обслуживания и повышение безопасности при проведении работ.
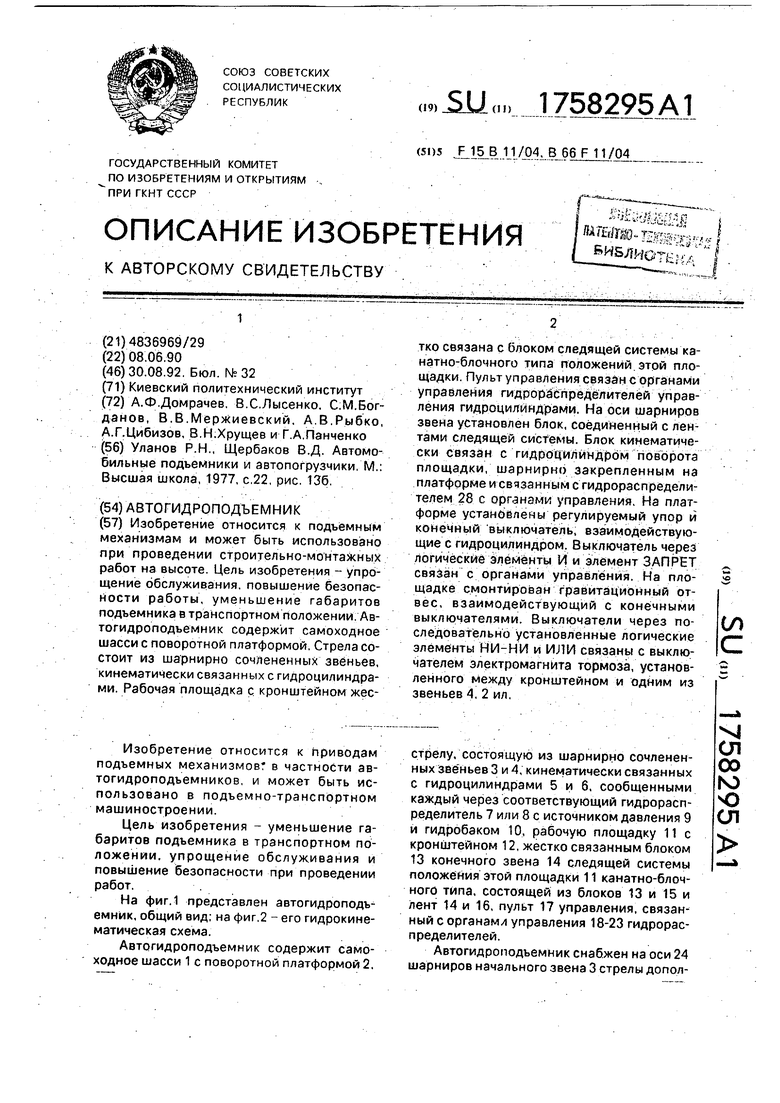
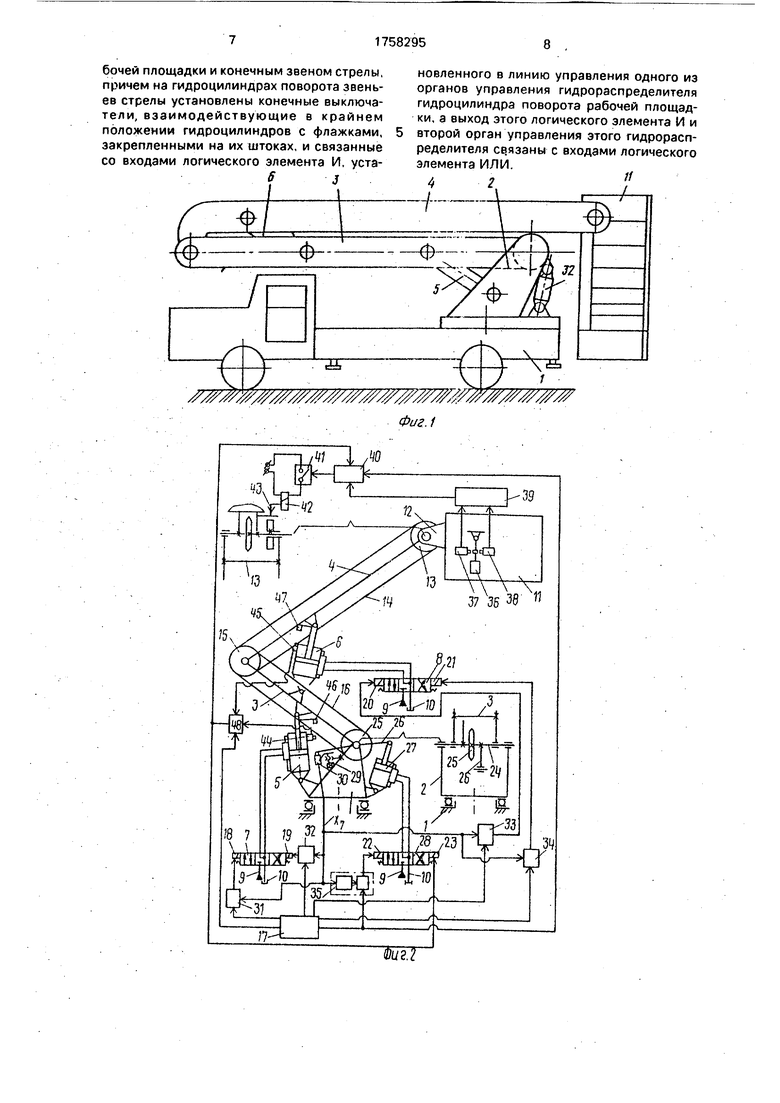
На фиг.1 представлен автогидроподъемник, общий вид; на фиг.2 - его гидрокинематическая схема.
Автогидроподъемник содержит самоходное шасси 1 с поворотной платформой 2,
стрелу, состоящую из шарнирно сочлененных звеньев 3 и 4, кинематически связанных с гидроцилиндрами 5 и 6, сообщенными каждый через соответствующий гидрораспределитель 7 или 8 с источником давления 9 и гидробаком 10, рабочую площадку 11 с кронштейном 12, жестко связанным блоком 13 конечного звена 14 следящей системы положения этой площадки 11 канатно-блоч- ного типа, состоящей из блоков 13 и 15 и лент 14 и 16, пульт 17 управления, связанный с органам/1 управления 18-23 гидрораспределителей.
Автогидроподъемник снабжен на оси 24 шарниров начального звена 3 стрелы дополVI
сл
00
го о сл
нительным блоком 25, соединенным с лентами 16 следящей системы и кинематически (через рычаг 26), связанным с дополнительным гидроцилиндром 27 поворота рабочей площадки 11, шарнирно закрепленным на поворотной платформе 2 и через дополнительный гидрораспределитель 28 сообщенным с источником давления 9 и гидробаком 10, а на поворотной платформе 2 установлены регулируемый упор 29 и конечный выключатель 20, взаимодействующие с гидроцилиндром 27 поворота рабочей площадки в одном из его крайних положений, причем диаметр дополнительного блока 25 равен диаметру блока 15 следящей системы, установленной на первом звене 3 системы.
Конечный выключатель 30 через логические элементы И 32-34 связан с органами управления 18-21 гидрораспределителей 7 и 8 поворота шэрнирно сочлененных звеньев 3 и 4 стрелы, а через логический элемент ЗАПРЕТ 35 связан с органом 22 управления гидрораспределителя 28 поворота рабочей площадки 11.
На рабочей площадке 11 смонтирован гравитационный отвес 36, взаимодействующий с конечным выключателем 37 и 38, связанными через последовательно включенные логические элементы НИ-НИ 39, ИЛИ 40 с включателем 41 электромагнита 42 вновь введенного тормоза 43, установленного между кронштейном 12 рабочей площадки 11 и конечным звеном 4 стрелы, причем на гидроцилиндре 5 и 6 поворота звеньев 3 и 4 стрелы установлены конечные выключатели 44 и 45, взаимодействующие в крайнем положении гидроцилиндров 5 и 6 с флажками 46 и 47, закрепленными на их штоках и связанные со входами логического элемента И 48, установленного в линию управления одного из органов 23 управления гидрораспределителя 28 поворота рабочей площадки 11, а выход этого логического элемента 48 и второй орган 22 управления этого гидрорэспределителя 28 связаны с входами логического элемента ИЛИ 40.
Автогидроподъемник работает следующим образом.
Автогидроподъемник, находящийся в транспортном положении (фиг 1), устанавливают на опорные башмаки (не показаны), после чего с пульта 17 управления (фиг.2) поступает команда на орган управления 22 гидрораспределителя 28 и на логический элемент ИЛИ 40. Сигнал поступает на выключатель 41, подается напряжение на электромагнит 42 тормоза 43. Тормоз освобождает кронштейн 12 от конечного звена 4 стрелы. Одновременно гидрораспределитель 28 переключается в левую по схеме позицию. Рабочая жидкость от источника 9 давления поступает через гидрозамок в поршневую полость гидроцилиндра 27. Гидроцилиндр 27 поворачивает рычаг 26 и ось 24 в шарнирах поворотной платформы 2.
Следящая система, состоящая из блоков 25,15 и 13. лент 16 и 14 поворачивает кронштейн 12 и рабочую площадку 11 из
0 транспортного положения относительно оси. При достижении площадкой 11 горизонтального положения рычаг воздействует на регулируемый упор 29 и конечный выключатель 30. Сигнал с конечного выключателя
5 30 поступает на вход логического элемента ЗАПРЕТ 35, за счет чего на его выходе появляется сигнал. Гидрораспределитель 28 под действием пружин устанавливается в нейтральное положение. Одновременно сигнал
0 поступает на входы логических элементов И 31-34, тем самым, разрешая работу гидроцилиндров 5 и 6 Гравитационный отвес 36 устанавливается вертикально, в результате чего сигналы с конечных выключателей 37 и
5 38 снимаются Сигнал на выходе логического элемента НИ-НИ 39 через логический элемент ИЛИ 40 поступает на выключатель 41, в результате чего электромагнит 41 растормаживает тормоз 43.
0 Рабочие - монтажники вместе с необходимым инструментом и монтируемым оборудованием поднимаются на площадку 11. С пульта управления подается команда. На выходе логических элементов И 32 и 33
5 вырабатываются сигналы, и органы управления 19 и 20 переключают гидрораспределители 7 и 8 соответственно в левую и правую по фиг.2 позиции. Рабочая жидкость поочередно поступает в поршневые поло0 сти гидроцилиндров 6 и 5, а штоковые полости этих гидроцилиндров соединяются со сливом, Осуществляется движение рабочей площадки в зону монтажа. Следящая система, состоящая из блоков 13,15 и 25, лент 14
5 и 16 обеспечивает постоянное горизонтальное положение площадки. После подачи команд с пульта 17 управления рабочая площадка 11 останавливается, и рабочими производится монтаж технологического
0 оборудования.
Для спуска рабочей площадки с пульта управления 17 поочередно подаются команды. На выходе логических звеньев И 31 и 34 вырабатываются сигналы. Органы управле5 нив 18 и 21 переключают гидрораспределители 7 и 8 соответственно в правую и левую по фиг.2 позиции. Штоковые полости гидро- цйлиндров 6 и 5 соединяются с источником 9 давления, а поршневые полости этих гидроцилиндров - с гидробаком 10. Осуществляется опускание рабочей площадки до новой зоны монтажа или в исходное положение.
При возвращении в крайнее нижнее положение стрелы флажки 46 и 47 воздействуют на конечные выключатели 44 и 45. Сигналы поступают на входы логического элемента И 48. Рабочие-монтажники освобождают рабочую площадку 11. После этого с пульта управления подается сигнал. На выходе логического элемента И 48 вырабатывается сигнал, который поступает на орган управления 23 гидрораспределителя 28 и на вход логического элемента ИЛИ 40.
Гидрораспределитель 28 переключается в правую по схеме позицию. Рабочая жидкость от источника 9 поступает в штоко- вую полость гидроцилиндра 27, а его поршневая полость соединяется с гидробаком 10.Сигнал на выходе логического элемента ИЛИ 40 независимо от величины сигнала включает электромагнит 42, и растормаживается тормоз 43. Гидроцилиндр 27 через следящую систему поворачивает рабочую площадку в транспортное положение (фиг.1).
Если в процессе подъема, опускания или при установленной в зоне монтажа рабочей площадке 11 произошел разрыв ленты 14 или 16, рабочая площадка под действием ее веса начинает поворачиваться в зависимости от расположения ее центра тяжести (положение рабочих-монтажников и оборудования) в ту или иную сторону. Гравитационный отвес 36 воздействует на конечный выключатель 37 или 38. Сигнал поступает на логический элемент НИ-НИ 39, а на выходе логического элемента ИЛИ 40 вырабатывается сигнал и электромагнит 42 обесточивается, и тормоз 43 замыкает площадку 11 и конечную секцию стрелы 4. Опускание рабочей площадки в исходное положение в этом случае происходит обычным порядком после натяжения на пульте управления аварийной кнопки, отключающей электромагнит 42 независимо от состояния конечных выключателей 37 и 38.
Таким образом, предлагаемое техническое решение позволяет упростить обслуживание автопогрузчика, так как здесь подрегулировка горизонтального положения площадки из-за вытяжки ленты и начальная ее установка может осуществляться за счет установки регулируемого упора 29. Введение в систему конечных выключателей 30,37,38,44 и 45 и их связь с логическими элементами, введение тормоза 43, связанного с гравитационным отвесом 36. повышает безопасность работы автогидро- подьемника как за счет блокировки включений пульта управления, так и при возможном обрыве ленты следящей системы канатно-блочного типа. Введение гидравлического механизма поворота рабочей площадки в транспортном положении и его связь с другими механизмами уменьшает габариты автогидроподъемника в транспортном положении.
Формула изобретения
01. Автогидроподъемник, содержащий
самоходное шасси с поворотной платформой, стрелу, состоящую из шарнирно сочлененных звеньев, кинематически связанных с гидроцилиндрами, сообщенными каждый
5 через соответствующий гидрораспределитель с источником давления и гидробаком, рабочую площадку с кронштейном, жестко связанным с блоком конечного звена следящей системы положения этой площадки ка0 натно-блочного типа, состоящей из блоков и лент, пульт управления, связанный с органами управления гидрораспределителей, отличающийся тем, что, с целью уменьшения габаритов подъемника втранс5 портном положении и упрощения обслуживания, он снабжен на оси шарниров начального звена стрелы дополнительным блоком, соединенным с лентами следящей системы и кинематически связанным с до0 полнительным гидроцилиндром поворота рабочей площадки, шарнирно закрепленным на поворотной платформе и через до- полнительный гидрораспределитель сообщенным с источником давления и гид5 робаком, а на поворотной платформе установлены регулируемый упор и конечный выключатель, взаимодействующие с гидроцилиндром поворота рабочей площадки в одном из его крайних положений, причем
0 диаметр дополнительного блока равен диаметру блока следящей системы, установленной на первом звене системы.
2.Автогидроподъемник по п.1, о т л и - чающийся тем, что, с целью повышения
5 безопасности в работе, конечный выключатель через логические элемента И связан с органами управления гидрораспределителей поворота шарнирно сочлененных звеньев стрелы, а через логический элемент
0 ЗАПРЕТ - с органом управления гидрораспределителя гидроцилиндра поворота рабочей площадки.
3.Автогидроподъемник по п.2, отличающийся тем, что на рабочей площадке
5 смонтирован гравитационный отвес, взаимодействующий с конечными выключателями, связанными через последовательно включенные логические элемента НИ-НИ, ИЛИ с включателем электромагнита тормоза, установленного между кронштейном рабочей площадки и конечным звеном стрелы, причем на гидроцилиндрах поворота звеньев стрелы установлены конечные выключатели, взаимодействующие в крайнем положении гидроцилиндров с флажками, закрепленными на их штоках, и связанные со входами логического элемента И, устаSJ
новленного в линию управления одного из органов управления гидрораспределителя гидроцилиндра поворота рабочей площадки, а выход этого логического элемента И и второй орган управления этого гидрораспределителя связаны с входами логического элемента ИЛИ.
//


| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод автомобильного подъемника | 1991 |
|
SU1789787A1 |
| Электрогидравлическая система управления выносными опорами самоходной площадки обслуживания высокорасположенных объектов | 1991 |
|
SU1837125A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Устройство управления положением рамы транспортного средства | 1990 |
|
SU1808744A1 |
| Гидропривод механизма поворота подъемного крана | 1989 |
|
SU1691574A1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| Рулевое управление транспортного средства | 1988 |
|
SU1558757A1 |
| Устройство для управления выносными опорами грузовой платформы | 1986 |
|
SU1423493A1 |
| Устройство для очистки корпуса судна | 1983 |
|
SU1134473A1 |
Изобретение относится к подъемным механизмам и может быть использовано при проведении строительно-монтажных работ на высоте. Цель изобретения - упрощение обслуживания, повышение безопасности работы, уменьшение габаритов подъемника в транспортном положении Автогидроподъемник содержит самоходное шасси с поворотной платформой, Стрела состоит из шарнирно сочлененных звеньев, кинематически связанных с гидроцилиндрами. Рабочая площадка с кронштейном жестко связана с блоком следящей системы ка- натно-блочного типа положений этой площадки. Пульт управления связан с органами управления гидрораспределителей управления гидроцилиндрами. На оси шарниров звена установлен блок, соединенный с лентами следящей системы. Блок кинематически связан с гидроцилиндром поворота площадки, шарнирно закрепленным на платформе и связанным с гидрораспределителем 28 с органами управления. На платформе устанОЁлены регулируемый упор и конечный выключатель, взаимодействующие с гидроцилиндром. Выключатель через логические элементы И и элемент ЗАПРЕТ связан с органами управления. На площадке смонтирован гравитационный отвес, взаимодействующий с конечными выключателями. Выключатели через последовательно установленные логические элементы НИ-НИ и ИЛИ связаны с выключателем электромагнита тормоза, установленного между кронштейном и одним из звеньев 4, 2 ил. со с
// / /////// / ///// / /
Фиг 1
| Уланов Р.Н., Щербаков В.Д | |||
| Автомобильные подъемники и автопогрузчики, М.: Высшая школа, 1977, с.22, рис | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
