Изобретение относится к гироскопическим устройствам и может быть использовано в авиационной и ракетно-космической технике.
Известны гиростабилизаторы (ГС) с подвесом в виде внутренних рамок, вращающихся относительно внешних, а внешние - относительно корпуса ГС от приводов поворота рамок (см. авт. св. № 1839898), прототип и другие аналоги.
Основным недостатком прототипа и аналогов является наличие внешних и внутренних рамок подвеса с расположением на них приводов поворота рамок, штанги, соединяющей двигатели-маховики, что ухудшает статическую балансировку, жесткость конструкции ГС и увеличивает инерционный момент в осях подвеса, который содействует появлению в опорах подвеса дополнительного момента трения.
Данное изобретение служит для устранения этих недостатков. Для этой цели гиродвигатель имеет четыре опоры, которыми опирается на глобоиды, соединенные с приводами поворота, расположенными неподвижно в основании.
Опоры позволяют также поворачиваться гиродвигателю относительно осей подвеса.
Сущность изобретения поясняется чертежом.
ГС состоит из гиродвигателя 1 (содержащего два двигателя-маховика, каждый из которых заключен в гермокамеру) с четырьмя опорами 2 по две на каждой оси, выполненные в виде валиков, установленных в нем на подшипниках качения 3. Другим концом валики опираются на стенки паза спирали глобоидов 4 и расположены в пазах 5.
Глобоиды установлены на подшипниках 6, один из которых находится в корпусе 7, а другой в основании 8 ГС, и соединены с приводами 9, размещенными неподвижно в основании 8 ГС.
На основании 8 ГС расположен статор 10 двухкоординатного датчика, а его якорь 11 размещен на гиродвигателе 1.
При работе ГС глобоиды 4, расположенные по оси У, начинают синхронно вращаться приводами 9, обеспечивая поворот гиродвигателя 1 на углы ±α вокруг оси X в подшипниках 3; аналогично при синхронном вращении глобоидов 4. По оси X осуществляется поворот гиродвигателя 1 вокруг оси У в подшипниках 3 на угол ±β.
При одновременной синхронной работе приводов 9 по осям X и У происходит также поворот гиродвигателя 1 вокруг этих же осей на подшипниках 3.
Вращение гиродвигателя 1 вокруг оси Z ограничено пазами 5.
Магнитопровод статора 10 двухкоординатного датчика измеряет отклонение якоря 11, а с ним и гиродвигателя 1 в двух взаимно перпендикулярных плоскостях.
По сравнению с прототипом потенциальные преимущества предлагаемого ГС заключаются в следующем:
1) отсутствие внутренних и внешних рамок, штанги, соединяющей двигатели-маховики, позволяет снизить массу ГС и его габариты;
2) улучшена статическая балансировка подвижных частей ГС за счет выполнения двигателей-маховиков симметричными относительно опор и установки приводов поворота на неподвижном основании;
3) отсутствие рамок и штанги уменьшает влияние инерционного момента по осям подвеса;
4) упрощенная компоновка позволяет повысить жесткость и надежность гиростабилизатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСТАБИЛИЗАТОР | 1975 |
|
SU1839898A1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1984 |
|
SU1839933A1 |
| ПРИВОД РАМОК КАРДАНОВА ПОДВЕСА ГИРОСТАБИЛИЗАТОРА | 1978 |
|
SU1839980A1 |
| Система гиростабилизации кабины пилотируемого летательного аппарата (ЛА) | 2019 |
|
RU2728221C1 |
| УСТРОЙСТВО ГИРОСКОПИЧЕСКОЙ СТАБИЛИЗАЦИИ ЛИДАРА В ПЛОСКОСТИ ГОРИЗОНТА | 2007 |
|
RU2329468C1 |
| ГИРОСТАБИЛИЗАТОР | 1978 |
|
SU1840380A1 |
| ПРИВОД ПОВОРОТА РАМОК КАРДАНОВА ПОДВЕСА ГИРОСТАБИЛИЗАТОРА | 1981 |
|
SU1839893A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН КОСМИЧЕСКОГО АППАРАТА | 1979 |
|
SU1839918A1 |
| Поточно-глобоидный технологический модуль | 1991 |
|
SU1781082A1 |
| НАБЛЮДАТЕЛЬНЫЙ ПРИБОР СО СТАБИЛИЗАЦИЕЙ И ЦИФРОВОЙ ФОТОРЕГИСТРАЦИЕЙ | 2010 |
|
RU2442199C1 |
Изобретение относится к гироскопическим устройствам и может быть использовано в авиационной и ракетно-космической технике. Сущность: устройство содержит гиродвигатель, приводы поворота по каждой оси и датчик команд. При этом гиродвигатель установлен в двухкоординатном подвесе с опорами. Кроме того, двухкоординатный подвес с опорами выполнен в виде валиков и червяков глобоидной передачи. Один конец каждого валика закреплен с возможностью вращения в гиродвигателе, а в паз спирали каждого из червяков установлен второй конец соответствующего ему валика. Причем червяки глобоидной передачи установлены на основании гиростабилизатора перпендикулярно ему и связаны с соответствующими им приводами поворота. Технический результат: уменьшение габаритов. 1 ил.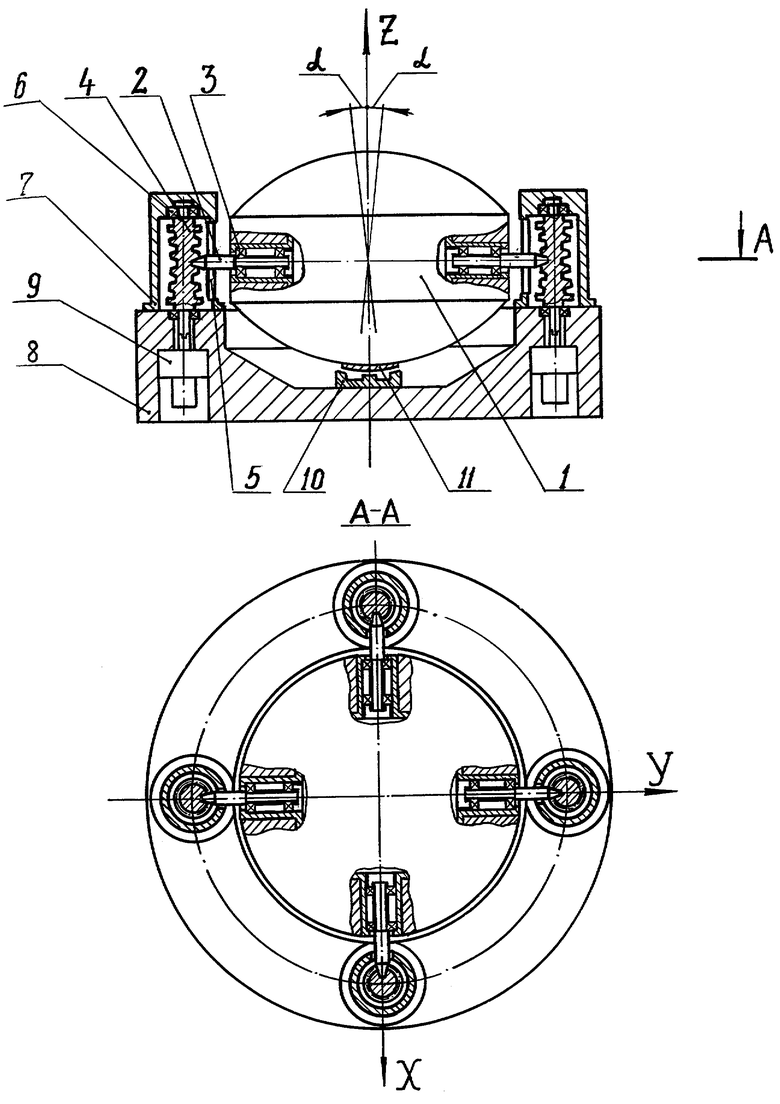
Гиростабилизатор, содержащий гиродвигатель, установленный в двухкоординатном подвесе с опорами, приводы поворота по каждой оси и датчик команд, отличающийся тем, что, с целью уменьшения габаритов, двухкоординатный подвес с опорами выполнен в виде валиков, один конец каждого из которых закреплен с возможностью вращения в гиродвигателе, и червяков глобоидной передачи, в паз спирали каждого из которых установлен второй конец соответствующего ему валика, причем червяки глобоидной передачи установлены на основании гиростабилизатора перпендикулярно ему и связаны с соответствующими им приводами поворота.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авт | |||
| свид | |||
| ГИРОСТАБИЛИЗАТОР | 1975 |
|
SU1839898A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

