Изобретение относится к области приборостроения, а именно - к гироскопическим стабилизаторам углового положения различных объектов.
Известен индикаторный гиростабилизатор углового положения (Б.И. Назаров Гироскопические устройства 1970 г., стр. 193-208). Он содержит платформу в кардановом подвесе, трехстепенной гироскоп, усилитель-регулятор и привод, ротор которого закреплен на оси подвеса платформы. Выход гироскопа подключен через усилитель-регулятор к приводу. Этот прибор предназначен для стабилизации углового положения объекта, который установлен на платформе.
Наиболее близким по составу и принципу работы к предложенному устройству является индикаторный гиростабилизатор, представленный в (А.В. Кулешов, В.В. Фатеев. Погрешности двухосного индикаторного гиростабилизатора оптического прибора при качке носителя. Приборы и системы. управление, контроль, диагностика. 2017. №12. с. 7-13). Он содержит корпус, платформу в кардановом подвесе, на которой установлен трехстепенной гироскоп, являющийся датчиком углового положения платформы в инерциальном пространстве, усилитель-регулятор и привод в виде электрического датчика момента. Статор привода закреплен на корпусе, а ротор - на оси платформы. Выход гироскопа подключен через усилитель-регулятор к обмотке управления привода. Этот прибор принят за прототип.
Недостатком прототипа является его невысокая точность, что обусловлено наличием нежесткости в механической цепи передачи момента от ротора привода к платформе. Такая нежесткость практически всегда имеет место в гиростабилизаторах, поскольку конструкционные элементы, соединяющие ротор привода и ту часть платформы, которая обеспечивает основную часть её момента инерции, всегда имеют ограниченную угловую жесткость. Наличие указанной нежесткости не позволяет получить высокий коэффициент обратной связи, величина которого, как правило, определяет, прежде всего, точность прибора, поскольку при этом снижается запас устойчивости автоматической системы стабилизации.
Влияние нежесткости в цепи передачи момента на устойчивость автоматической системы широко известно и описано, например, в (В.А. Бессекерский, Е.А. Фабрикант Динамический синтез систем гироскопической стабилизации, Судостроение, 1968 г., стр. 130-147). Физически это объясняется тем, что при наличии нежесткости автоматическую систему индикаторного гиростабилизатора следует рассматривать состоящей из двух масс: платформы и ротора. Это приводит к тому, что для обеспечения устойчивости необходимо вводить демпфирование движения каждого из этих тел. Обычно коэффициенты «естественного» демпфирования платформы и ротора невелики. Для повышения демпфирования в индикаторном гиростабилизаторе вводят отрицательную обратную связь по скорости (В.А. Матвеев, В.П. Подчезерцев, В.В. Фатеев Гироскопические стабилизаторы на динамически настраиваемых вибрационных гироскопах. МГТУ им. Н.Э. Баумана, 2005, стр. 80-101). Для этого сигнал, пропорциональный угловой скорости движения платформы, после усиления и инвертирования, подают на привод. Однако если для абсолютно жесткой системы, в которой угловые скорости платформы и ротора привода одинаковы, это приводит к увеличению демпфирующих моментов и платформы, и ротора привода, то для нежесткой двухмассовой системы, в которой угловые скорости движения платформы и ротора различны, а момент обратной связи, пропорциональный угловой скорости движения одного тела (платформы), прикладывается к другому телу (ротору), это приводит к снижению устойчивости, что может привести к возникновению автоколебаний.
В предложенном индикаторном гиростабилизаторе недостаток прототипа устранен путем установки на ротор гироскопического датчика угловой скорости и подключения его выходного сигнала через усилитель-регулятор к приводу, что позволило значительно увеличить демпфирование движения ротора привода и устойчивость всей системы, что, в свою очередь, позволило повысить коэффициент позиционной обратной связи и соответственно - точность индикаторного стабилизатора.
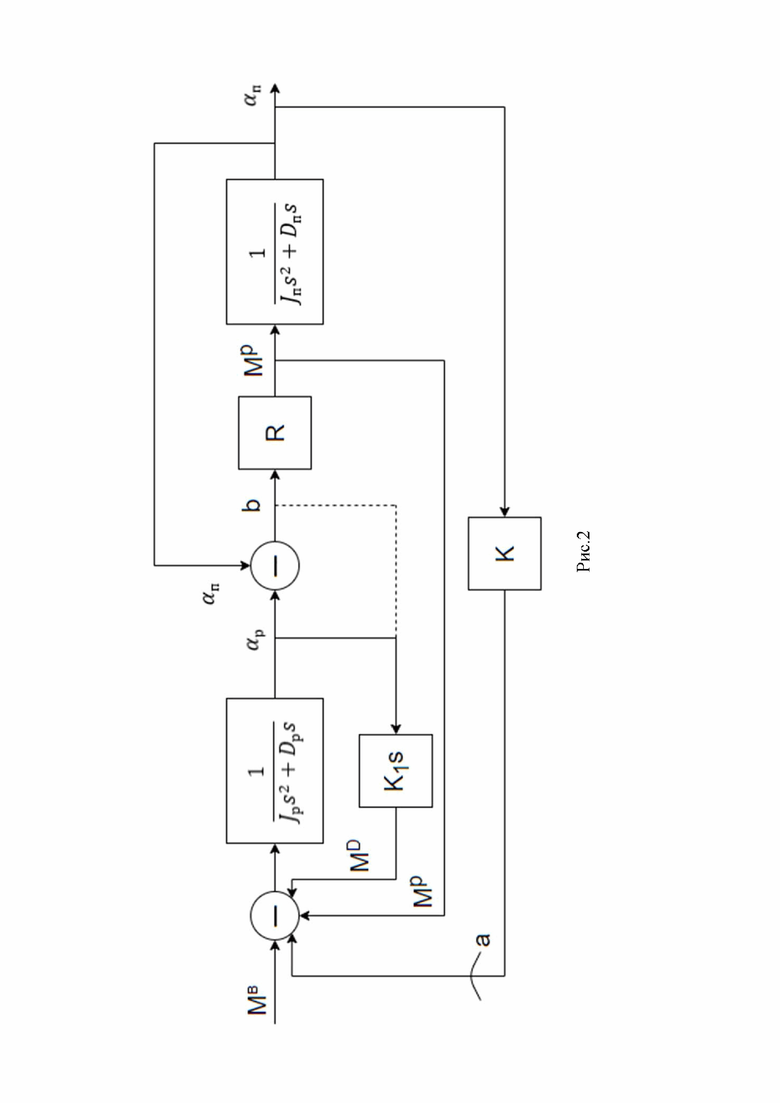
На рис. 1 и 2 приведены электро-кинематическая и структурная схемы предлагаемого изобретения для одноосного индикаторного гиростабилизатора; они же могут рассматриваться как схемы одного канала многоосного гиростабилизатора.
На рис. 3 представлены спрямленные логарифмические амплитудно-частотные характеристики индикаторного гиростабилизатора (пунктиром представлена ЛАХ прототипа, т.е. - в отсутствии ДУС на роторе привода).
На рис. 1 обозначены позициями:
1 - платформа,
2 - гироскопический измеритель углового положения платформы,
3 - усилитель-регулятор,
4 - ротор привода,
5 - статор привода,
6 - R- угловая жесткость механической цепи передачи момента от привода к платформе,
7 - ДУС - гироскопический датчик угловой скорости ротора.
На рис. 2 обозначены:
 осевые моменты инерции ротора и платформы,
осевые моменты инерции ротора и платформы,
 коэффициенты демпфирования ротора и платформы,
коэффициенты демпфирования ротора и платформы,
 абсолютные углы поворота ротора и платформы,
абсолютные углы поворота ротора и платформы,
 коэффициент усиления обратной связи по положению платформы,
коэффициент усиления обратной связи по положению платформы,
 коэффициент усиления обратной связи по скорости вращения ротора,
коэффициент усиления обратной связи по скорости вращения ротора,
 моменты внешних сил, демпфирования и пружины, условно обозначающей на рис. 1 нежесткость в механической цепи передачи момента.
моменты внешних сил, демпфирования и пружины, условно обозначающей на рис. 1 нежесткость в механической цепи передачи момента.
Составим передаточную функцию  автоматической системы индикаторного гиростабилизатора по рис. 2, разомкнутой в точке «а». Для исследования устойчивости гиростабилизатора представим, следуя (В.А. Бессекерский, Е.А. Фабрикант Динамический синтез систем гироскопической стабилизации, Судостроение, 1968 г., стр. 130-147), передаточную функцию разомкнутой системы в приближенном виде, имея в виду, что практически всегда
автоматической системы индикаторного гиростабилизатора по рис. 2, разомкнутой в точке «а». Для исследования устойчивости гиростабилизатора представим, следуя (В.А. Бессекерский, Е.А. Фабрикант Динамический синтез систем гироскопической стабилизации, Судостроение, 1968 г., стр. 130-147), передаточную функцию разомкнутой системы в приближенном виде, имея в виду, что практически всегда  , коэффициенты «естественного» демпфирования
, коэффициенты «естественного» демпфирования  - невелики, а жесткость
- невелики, а жесткость  , наоборот, - достаточно большая, по крайней мере
, наоборот, - достаточно большая, по крайней мере 


(*) - аналогичное значение относительного коэффициента затухания  получается при переносе входа усилителя-регулятора с передаточной функцией
получается при переносе входа усилителя-регулятора с передаточной функцией  в точку «b»
в точку «b»
Соответствующие спрямленные логарифмические амплитудно-частотные характеристики представлены на рис. 3.
Следуя (В.А. Бессекерский, Е.А. Фабрикант Динамический синтез систем гироскопической стабилизации, Судостроение, 1968 г., стр. 130-147), отмечаем, что ЛАХ известного гиростабилизатора в зоне  имеет пик, равный
имеет пик, равный  , где
, где  . Как отмечалось ранее, величина
. Как отмечалось ранее, величина  очень мала, что соответствует очень большой величине пика ЛАХ. Если пик ЛАХ в зоне пересекает ось ноля децибел, то возникает опасность потери гиростабилизатором устойчивости и возникновению автоколебаний.
очень мала, что соответствует очень большой величине пика ЛАХ. Если пик ЛАХ в зоне пересекает ось ноля децибел, то возникает опасность потери гиростабилизатором устойчивости и возникновению автоколебаний.
По рис. 3 видно, что введение обратной связи по скорости ротора путем установки на него ДУС, подключенного ко входу усилителя-регулятора, существенно увеличивает относительный коэффициент затухания

Это, в свою очередь уменьшает величину пика ЛАХ в зоне и вероятность возникновения автоколебаний. Соответствующая ЛАХ показана на рис. 3 сплошной линией.

Изобретение относится к области приборостроения, а именно - к гиростабилизаторам углового положения различных объектов. Индикаторный гиростабилизатор содержит корпус, платформу в угловом подвесе, установленный на платформе гироскопический датчик её углового положения, привод, состоящий из статора, установленного на корпусе, ротора, соединенного с платформой механической связью, и обмотки управления, усилитель-регулятор с двумя входами. Выход усилителя-регулятора подключен к обмотке управления привода, а выход гироскопического датчика подключен к первому входу усилителя-регулятора. При этом в него введен гироскопический датчик угловой скорости, установленный на роторе привода так, что его ось чувствительности параллельна оси вращения ротора, а его выход подключен ко второму входу усилителя-регулятора. Технический результат – повышение точности индикаторного гиростабилизатора. 3 ил.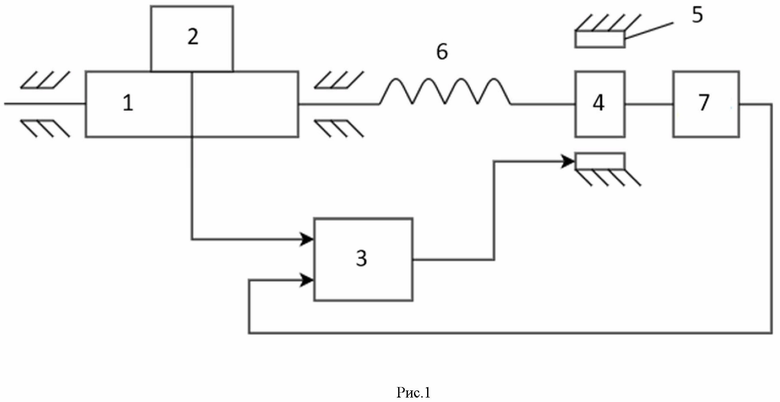
Индикаторный гиростабилизатор, содержащий корпус, платформу в угловом подвесе, установленный на платформе гироскопический датчик её углового положения, привод, состоящий из статора, установленного на корпусе, ротора, соединенного с платформой механической связью, и обмотки управления, усилитель-регулятор с двумя входами, при этом выход усилителя-регулятора подключен к обмотке управления привода, а выход гироскопического датчика подключен к первому входу усилителя-регулятора, отличающийся тем, что в него введен гироскопический датчик угловой скорости, установленный на роторе привода так, что его ось чувствительности параллельна оси вращения ротора, а его выход подключен ко второму входу усилителя-регулятора.
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| ГИРОСТАБИЛИЗАТОР | 1975 |
|
SU1839898A1 |
| Импульсный индикатор для пожарной сигнализации | 1930 |
|
SU29390A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |

