Предлагаемое изобретение относится к усовершенствованию электромеханических исполнительных органов на базе гироскопических устройств систем ориентации космических аппаратов.
Известно, что для изменения углового положения космического аппарата на борту его должна быть система ориентации и стабилизации, содержащая исполнительные органы, с помощью которых генерируются управляющие моменты относительно осей выбранной системы координат.
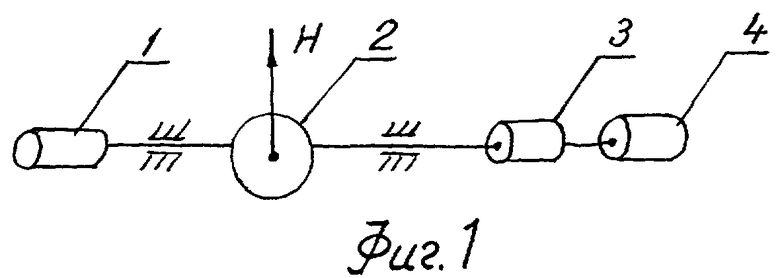
Известные в настоящее время исполнительные органы на базе двухстепенных гироскопов выполняются по классической кинематической схеме гироскопических устройств (см.фиг.1): на оси подвеса гироскопа устанавливаются датчик угла, датчик момента и при необходимости демпфер (см. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов, М.: Наука, 1974, Разыграев А.П. Основы управления космическими аппаратами и кораблями, М.: Машиностроение, 1977).
С помощью такой кинематической схемы управление угловым положением космического аппарата возможно проводить как в активном режиме, когда подается питание на управляющую обмотку датчика момента и последний создает момент по оси подвеса, так и в пассивном - за счет демпфера.
Для осуществления достаточно линейной характеристики управления момент сухого трения в оси подвеса двигателя-маховика должен быть минимальным.
Кроме этого к недостаткам этой схемы следует отнести:
- необходимость отсутствия в датчике момента остаточных моментов при снятии питания;
- достаточно большое потребление, габариты и масса датчика при обеспечении большого (более 0,1 кгм) момента от датчика;
- наличие реактивного момента при включении датчика момента.
Целью предлагаемого изобретения является устранение вышеприведенных недостатков и улучшение технических характеристик исполнительного органа: повышение линейности управления, снижение потребляемой мощности, обеспечение стабильности положения вектора Н и улучшение габаритно-массовых характеристик исполнительного органа в целом.
Сущность изобретения поясняется чертежами, где на фиг.1 приведена схема известного электромеханического исполнительного органа, а на фиг.2 - схема предлагаемого электромеханического исполнительного органа.
Электромеханический исполнительный орган имеет датчик угла (1), связанный с электродвигателем-маховиком (2), и датчик момента (4), связанный с электродвигателем-маховиком через демпфер (3).
Предлагаемый электромеханический орган имеет датчик угла (1), связанный с рамкой карданова подвеса электродвигателя-маховика (2), вязкий демпфер (3), привод вращения рамки (4), включающий электродвигатель (5), редуктор (8), упругий элемент (6), связанный через переключающий элемент (7) с осью подвеса.
Величина передаваемого момента от привода на рамку будет определяться характеристикой упругого элемента (при его закручивании).
Включение переключающего элемента (муфты) производится одновременно с подачей питания на электродвигатель привода. В зависимости от режима управления возможно и раздельное с электродвигателем управление муфтой. Переключающий элемент позволяет при снятии питания разрывать кинематическую цепь ось подвеса - привод вращения рамки, что позволяет в определенных режимах управления (без привода) уменьшить момент сопротивления по оси подвеса до величины момента трения в опорах рамки подвеса.
Кроме этого предлагаемый электромеханический исполнительный орган в сравнении с уже известными обладает следующими достоинствами:
1) может быть использован в нескольких режимах управления КА,
а) при включенной муфте (переключающем элементе)
- в активном режиме (управление от привода);
- в режиме, где необходимо наличие фиксации вектора Н;
б) при выключенной муфте (элементе) - в пассивном режиме;
2) потребляемая мощность питания привода при одинаковой величине управляющего момента (более 0,1 кгм) меньше, чем у датчика момента;
3) наличие определенной фиксации вектора Н при включенной муфте (элементе) и снятом питании привода;
4) привод при вышеуказанных условиях обладает лучшими габаритно-массовыми характеристиками в сравнении с индукционными датчиками момента;
5) широкий диапазон передаваемого момента от привода на рамку, практически от сотых долой до десятков килограммометров;
6) отсутствие на оси подвеса гироскопа остаточных моментов после снятия управляющего момента и отключение муфты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ ДВУХСТЕПЕННЫЙ УПРАВЛЯЮЩИЙ ГИРОСКОП | 1984 |
|
SU1839931A1 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| КОМБИНИРОВАННАЯ ГРАВИТАЦИОННАЯ СИСТЕМА ОРИЕНТАЦИИ МАЛОГО КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2658070C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН КОСМИЧЕСКОГО АППАРАТА | 1979 |
|
SU1839918A1 |
| Способ динамичной высокоточной ориентации и стабилизации космического аппарата | 2018 |
|
RU2702932C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Комбинированная система ориентации и навигации подвижного объекта | 2020 |
|
RU2746236C1 |
| УСТРОЙСТВО ДЛЯ ЗАДАНИЯ УГЛОВЫХ КОЛЕБАНИЙ ИСПЫТУЕМОМУ ОБЪЕКТУ | 1989 |
|
RU2010206C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2015 |
|
RU2621933C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
Изобретение относится к области космической техники. Исполнительный орган содержит двухстепенный гироскоп с датчиком угла и моментным устройством, состоящим из электродвигателя с редуктором и демпфера. Между редуктором и демпфером введена переключающая муфта с упругим элементом на выходе. Технический результат - возможность раздельного активного и пассивного управления и арретирования гироскопа в любом из положений. 2 ил.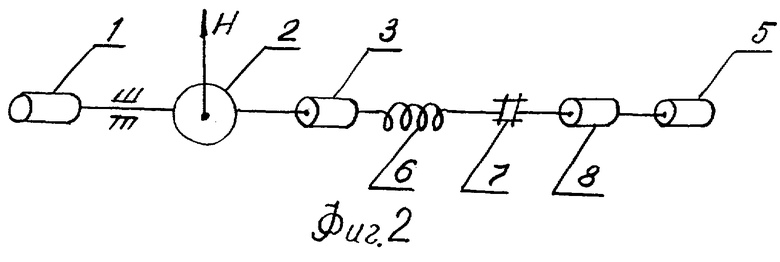
Электромеханический исполнительный орган, содержащий двухстепенный гироскоп с датчиком угла и моментным устройством в виде электродвигателя с редуктором и демпфера, отличающийся тем, что, с целью обеспечения возможности раздельного активного и пассивного управлений и арретирования гироскопа в любом из положений, между редуктором и демпфером введена переключающая муфта с упругим элементом на выходе.
| Каргу Л.И | |||
| Системы угловой стабилизации космических аппаратов, М., 1980 г., стр.96÷102 | |||
| Раушенбах Б.В., Токарь Е.Н | |||
| Управление ориентацией космических аппаратов, М.: Наука, 1974г. |

