(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящая система | 1978 |
|
SU744432A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Устройство для отработки заданногоположения регулирующего органа | 1973 |
|
SU508779A1 |
| Следящая система | 1990 |
|
SU1764030A1 |
| Бесконтактный следящий электропривод постоянного тока | 1972 |
|
SU463097A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Следящая система | 1979 |
|
SU849133A2 |
1
Изобретение относится к системам автоматического регулирования, осуществляющим замедление при приближении к границе перемещения, и может быть использована в устройствах автоматики для отработки с максимальной скоростью и минимальным временем переходного npoutecca скачкообразных рассогласований, например в устройствах изменения увеличения оптических систем, в приводах наведения оптических, телевизионных и других устройств, в механизмах протяжки, считывания, печати и т.д. .
Известны следящие системы, в которых для улучшения динамических свойств используется, наряду с исполнительным двигателем (блоком муфт), дополнительная тормознаямуфта, предназначенная для гащения запасенной кинетической энергии механизма и исполнительного двигателя в момент отсутствия управлянадего напряжения на входе усилителя системы 1.
Однако эти системы достаточно громоздки и аппаратурно сложны из-за наличия самих тормозных муфт и дополнительных усилителей для их управления. Кроме того, дополнительное потребление шергни тормозными муфтами делает эти системы неэкономичными.
Наиболее близкой по технической сущности к предлагаемой является следящая система, содержащая последовательно соединенные усилитель, двигатель, тахогенератор, делитель иапряжения и первый сумматор, а также пороговый блок и ключ, сигналшый вход которого соединен с выходом тахогенератора 2.
В этой системе в процессе отработке заданного рассогласования в момент равенства напряжений шшала рассогласования (первый вход уйшителя) н сигнала скоростной обработки свя-. зи, снимающегося с тахогеиератора и подающегося через делитель напряжения на второй вход усилителя, двигатель системы обесточен н система продолжает движение по инерции. Однако в следующий момент, так как система все же продолжает двигаться к точке обработки, сигнал рассогласования становится уже меньще сигнала отрицательной обратной связи, и с выхода усилителя на двигатель тачинает поступать управляющее напряжение противоположной полярности (фазы), величина которого прямо пропорци;3744433
щальна разности сигналов рассогласования и отрицательной обратной связи. Пропорционально выходному сигналу усилителя исполнительный двигатель развивает момент, препятствующий дальнейшему движению системы по инерции. . В момент достижения системой согласованного положения, т.е. при нулевом сигнале рассоглабоваакя, на вход уошителя через делитель на прямйния приходит только сигнал отрицательной обратной связи, двигатель развивает тормозящий ю Момент, система тормозится, и величнна сигнала отрицательной обратной связи уменьшается. После прохождения системой согласованного поло жешя, сигнал рассогласования меняет знак (фазу), в результате чего на первом и втором15 входах усилителя действуют сигналы одинаковой полярности (фазы), один из которых сигнал рассогласования - увеличивается по мере движения системь по ийерщш, а другой сигнал отрицательной обратной связи - убьта- 20 ,ет по мере убьтания.-скорости системы. При достижении системой определе.нной минимальной скорости с вькода тахогенератора снимаетсй напряжение, абсолютная вел11ЧШШ которого становится меньше установленйого ЛЬваяс - 25 батывання порогового блока, в результате чего пороговый блок срабатывает и переводит в ра:бочее состояние генераГор импульсов. Импульсное напряжёшге с reftisparbpa отясрывЙет кДЙч, и сигнал непосредственно с вывода TaxorisHepa- 30 тора чврй ключ, блок памяти и к«асштабябй Шсйе,пойетсй йа третий ) дгь у жлителя. Двигатель остйгаййвйается, под деистёием сигнала, овразрва:6й1е1ч)(Я S результа е перехода к tpsKfOty зщчаявбгс йёре- 35 мещенйя, реверсируемся и йа Килой taciEJpo подходит к точке отработки (границе riejpeMeшения) с противоположной первоначальному движйшю стЬройы, после чего двизгатель Остай авливается.40
Нёдбстком и естарй системы адяяётся то, ойа замжает( скорости только вблизи максимума первого пертрегулирования, что приводит к дополнительному пробегу меха газма (появление рассогласования с пропшоположной сторопы границы Перемещения) и потере времени на его .ликвидацию.
Цель изобретения - повьппение быстродействия системы, т.е. выход на рабочий режим и: остановка сястемы в точке отработки должны 50 происхощпь за минимальное время и без выбега мехайизма.
Для достижения этой цетш в следящую систему дополнительно введен вторш сумматор, первый вход которого соединен с выходом55
Первого сумматора и входом порогового блока, а второй вход соединен с выходом ключа, выход второго сумматора соединен с входом
усилителя, вход порогового блока соединен с выходом первого сумматора, а выход - с управляющим входом ключа.
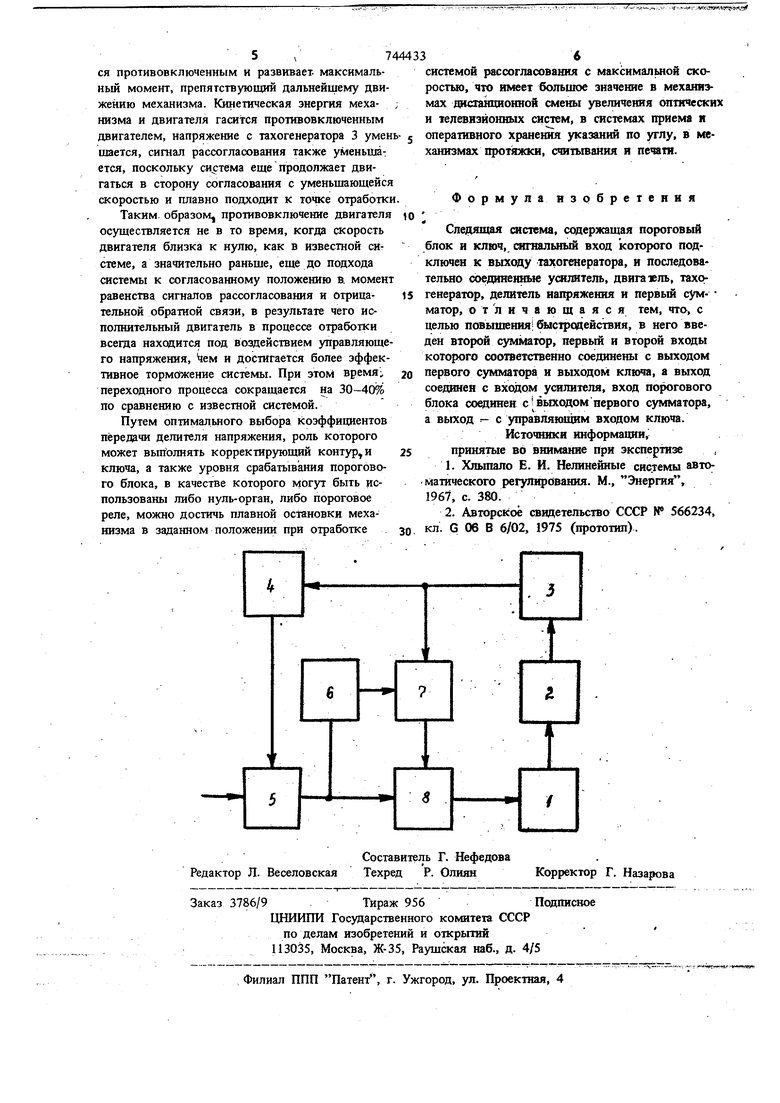
На чертеже приведена блок-схема предлагаемой следящей системы.
Система содержит усилитель 1, двигатель 2, хахогенератор 3, делитель 4 напряжения, первый сумматор 5, пороговый блок 6, кл19Ч 7,; второй сумматор 8.
Система работает следующим образом.
В согласованном состоянии ключ 7 открыт, сигнал с выхода тахогенератора 3 через ключ 7 и второй сумматор 8 подается на вход усилителя 1 (система замкнута по скорости), двигатель 2 обесточен и система неподвижна.
При подаче на первый вход первого сумматора 5 сигнала рассогласования с выхода этого сумматора снимается напряжение, величина которого превышает уровень срабатывания порогового блока 6. В результате срабатьгеания порогового блока 6 ключ 7 закрьшается, и цепь выход тахогенератора 3 - второй вход второго сумматора 8 прерьшается. Одновременно с зтим сигнал с выхода первого сумматора 5 через второй сумматор 8 поступает иа вход усилителя 1, в результате чего на делитель 2 подается управляющее напряжение соответствующей полярности (фазы), под действием которого двигатель 2 приходит во вращение и ведет систему в направлении уменьшения сигнала рассогласования. С выхода тахогенератора 3 через Делитель напряжения 4 на второй вход первого сумматора 5 подается часть напряжения скоростной отрицательной обратной связи, величина которого значительно меньше сигнала рассогласования, в результате чего на вход усилителя 1 через второй сумматор 8 подается уменьшенное на величину сигнала обратной связи напряжение рассогласования, и двигатель 2 ведет систему к согласованному положению с максимальной
скоростью.:
По мере обработки системой заданного рассогласования величина сигнала на первом входе первого сумматора 5 уменьнюется, а величина сигнала обратной связи остается постоянной, так как скорость двигателя максимальна, до того момента, коща сигнал рассогласования становится равным по величине сигналу обратной связи. В этот момент с выхода первого сумматора 5 снимается нулевое напряжение, пороговый блок 6 выключается, ключ 7 открьтается, и на второй вход второго сумматора 8 подается выходное напряжение тахогенератора 3 (система замыкается по скорости). На вход усилителя 1 с выхода сумматора 8 подается напряжение, величина и полярность которого определяются напряжением скоростной отрицательной обратной связи. Двигатель 2 оказываетСЯ противовключенным и развивает максимальный момент, препятствующий дальнейшему движению механизма. Кинетическая энергия механизма и двигателя гасится противовключенным двигателем, напряжение с тахогенератора 3 умен шается, сигаал рассогласования также уменьшат ется, поскольку систе1ма еще продолжает двигаться в сторону согласования с уменьшающейся скоростью и плавно подходит к точке отработки Таким образом, противовключенне двигателя осуществляется не в то время, когда скорость двигателя близка к нулю, как в известной системе, а значительно раньше, еще до подхода системы к согласованному положению в. момент равенства сигналов рассогласования и отрицательной обратной связи, в результате чего исполнительный двигатель в продессе отработки всегда находится под воздействием управляющего напряжения, чем и достигается более зффективное торможение системы. При этом время; переходного процесса сокращается на 30-40% по сравнению с известной системой. Путем оптимального выбора коэффициентов передачи делителя напряжения, роль которого может выполнять корректирующий контур, и ключа, а также уровня срабатывания порогового блока, в качестве которого могут быть использованы либо нуль-орган, либо пороговое реле, можно достичь плавной остановки механизма в заданном положении при отработке
744433 системой рассогласования с максимальной скоростью, что имеет большое значение в механяэмах дисхайционной смены увеличения оптических и телевизионных систем, в системах приема и оперативного хранешся указаний по углу, в механизмах протяжю, считывания я печати. Формула изобретения Следящая система, содержащая пороговый блок и ключ, сигнальный вход которого подключей к выходу тахогенератора, и последовательно соединенные усилитель, двигасль, тахргенератор, делитель напряжения и первый сум- матор, отличающаяся тем, что, с целью псяышения быстродействия, в него введен второй сумштор, первый и второй входы которого соответственно соединены с выходом первого сумматора и выходом ключа, а выход соединен с входом усилителя, вход порогового блока соединен с выходом первого сумматора, а выход - с управляюншм входом ключа. Источники ниформации,принятые во внимание при экспертизе , 1.Хпьшало Е. И. Нелинейные системы автоматического регулирования. М., Энергия, 1967, с. 380. 2.Авторское свидетельство СССР № 566234, кл. G 06 В 6/02, 1975 (прототип).
