Изобретение относится к области навигационных гироскопических устройств и может быть использовано в высокоточных навигационных комплексах подвижных объектов, в частности, морских.
Известны инерциальные навигационные системы (ИНС), содержащие триаду акселерометров (ТА) и цифровое вычислительное устройство (ЦВУ), в которых ТА установлена на стабилизированной в плоскости местного горизонта платформе.
Информация о составляющих ускорения объекта вырабатывается акселерометрами в виде средних значений ускорения (приращений кажущейся скорости) на шаге опроса акселерометров, равном такту вычислений в ЦВУ. Для прецизионных ИВС при наличии вибрации основания требуемая точность вычислений выходных данных может быть обеспечена только за счет значительного увеличения частоты решения задач в ЦВУ, которая должна быть существенно выше частот вибрации При этом существенно увеличивается загрузка ЦВУ.
Известны ИНС, в которых ТА установлена жестко на корпусе объекта (см. например, ИНС "Micron" (США), доклад R.Duncan, Материалы конференции ION National Aerospace Meeting, 1973). В таких ИНС информация о составляющих ускорения объекта по осям связанного с объектом базиса поступает в ЦВУ с выходов ТА также в виде первых интегралов от составляющих ускорения (приращений кажущейся скорости) на интервале времени ΔТ, равном такту вычислений в ЦВУ (ΔT=tK+1-tK, K=0, 1, 2...). При этом в акселерометрах формируются и текущие значения приращений кажущейся скорости на данном интервале.
Установка ТА на корпусе объекта приводит к необходимости выполнения в ЦВУ значительно большего объема сложных вычислений по сравнению с ИНС, описанной выше. При работе ИНС в условиях углового движения объекта и интенсивной высокочастотной линейной вибрации для обеспечения требуемой точности выработки выходных данных вычисления в ЦВУ необходимо производить с частотой, превосходящей частоту вибрации. При этом резко возрастают потребные вычислительные затраты, что приводит к усложнению и увеличению объема аппаратуры ЦВУ, следствием чего является увеличение массогабаритных характеристик, энергопотребления и стоимости ЦВУ и ИНС в целом. С другой стороны, при жестких ограничениях на указанные выше характеристики это может привести к невозможности обеспечения требуемой точности выработки выходных данных ИНС в условиях вибрации основания.
Целью настоящего изобретения является снижение массогабаритных характеристик, энергопотребления и стоимости ЦВУ ИНС без снижения точности ИНС.
Поставленная цель достигается введением в состав ИНС цепочки "n" последовательно соединенных трехканальных интеграторов (ТИ) (n≥1), на входы которой поступают выходные сигналы ТА, а выходные сигналы ТИ поступают на входы ЦВУ. Схема ИНС приведена на чертеже. ИНС содержит триаду акселерометров 1, цифровое вычислительное устройство 2 и цепочку "n" последовательно соединенных трехканальных интеграторов 3 (31...3n).
Работа устройства заключается в следующем. Текущие выходные сигналы ТА 1, представляющие собой текущие значения интеграла от ускорения на интервале (tK, tK+1), поступают на входы первого ТИ 31 цепочки интеграторов 3, с выходов которого текущие значения двойного интеграла от ускорения на интервале (tK, tK+1) поступают на входы второго ТИ 32 и т.д. Таким образом, в цепочке ТИ 3 выходной сигнал каждого ТИ представляет собой вычисленное на интервале (tK, tK+1) текущее значение интеграла от входного сигнала, поступающего для первого ТИ - с ТА, а для всех остальных ТИ - с предыдущего ТИ. В результате выходной сигнал "i"-го ТИ 3i представляет собой текущие значения "i+1"- кратных интегралов от составляющих ускорения, вычисленные на интервале (tK, tK+1). Значения выходных сигналов ТА и всех ТИ на конец интервала интегрирования поступают на входы ЦВУ, после чего происходит одновременное обнуление выходных сигналов ТА и ТИ и процессы интегрирования возобновляются. Таким образом сигналы с ТА и всех ТИ поступают в ЦВУ дискретно с тактом ΔT, равным такту вычислений в ЦВУ. Введение в состав ИНС цепочки ТИ 3 позволяет обеспечить требуемую точность вычислений в ЦВУ выходных данных ИНС при частоте решения задач, не превышающей частоту линейной вибрации. При этом потребная частота вычислений будет тем ниже, чем больше количество ТИ в цепочке (чем больше число n). По сравнению с базовым объектом, за который принята ИНС "Micron", предлагаемое устройство позволяет обеспечить высокую точность выработки выходных данных ИНС при значительном сокращении вычислительных затрат в ЦВУ. При этом существенный эффект достигается уже при малом числе ТИ в цепочке. Так, для обеспечения выработки вертикали места с точностью не хуже 1 дуг. с в условиях линейной вибрации с амплитудой 0,2 g и частотой 30 Гц и при наличии качки с амплитудой 6° и периодом 12 с, частота вычислений в ЦВУ базового объекта должна быть не ниже 100 Гц. При тех же условиях в предлагаемом устройстве такая же точность может быть обеспечена при частоте вычислений в ЦВУ:
8 Гц - при наличии 1 ТИ (n=1),
4 Гц - при наличии 2 ТИ (n=2).
При этом сложность вычислений в ЦВУ возрастает по сравнению с базовым вариантом незначительно. Проведенные расчеты показывают, что при построении ЦВУ на базе вычислителя с системой команд СМ и использовании одного ТИ экономия вычислительных затрат по быстродействию по сравнению с базовым объектом составит не менее 1 млн к. оп/с. Благодаря этому может быть значительно уменьшен объем аппаратуры ЦВУ, что ведет к снижению массогабаритных характеристик, энергопотребления и стоимости ЦВУ и изделия в целом. Этим также достигается повышение надежности ЦВУ и, следовательно, ИНС.
При использовании в ИНС акселерометров с цифровым выходом, ТИ могут быть реализованы на серийно выпускаемых отечественной промышленностью элементах цифровой техники. Поскольку для реализации предлагаемого устройства достаточно небольшого числа ТИ (n=1, 2), то введение их в состав ИВС практически не уменьшит предполагаемый эффект от использования изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ СИСТЕМА ОРИЕНТАЦИИ | 1998 |
|
RU2154810C2 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2003 |
|
RU2249791C2 |
| ИЗМЕРИТЕЛЬ ПОЛОЖЕНИЯ ТРУБНОГО СТАВА | 1991 |
|
RU2031368C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2016 |
|
RU2634082C1 |
| Способ построения инерциальных демпфированных систем с произвольным периодом, инвариантных по отношению к маневрированию, и устройство для его осуществления | 2015 |
|
RU2616087C1 |
| НАВИГАЦИОННО-ПИЛОТАЖНЫЙ КОМПЛЕКС | 2016 |
|
RU2634083C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| АВТОНОМНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2015 |
|
RU2578247C1 |
Изобретение относится к области навигационных гироскопических устройств и может быть использовано в высокоточных навигационных комплексах подвижных объектов, в частности, морских. Сущность: система содержит блок трех акселерометров с ортогональными осями чувствительности, жестко установленный на подвижном объекте, и блок определения матрицы угловой ориентации подвижного объекта. Кроме того, в систему дополнительно введены n последовательно соединенных трехканальных интеграторов, задатчик временного режима работы трехканальных интеграторов, блок вычисления производных матрицы угловой ориентации, блок выработки приращений скоростей, блок выработки приращений перемещений, блок выработки координат и скоростей объекта. Технический результат: обеспечение требуемой точности в условиях действия на объект вибраций. 1 ил.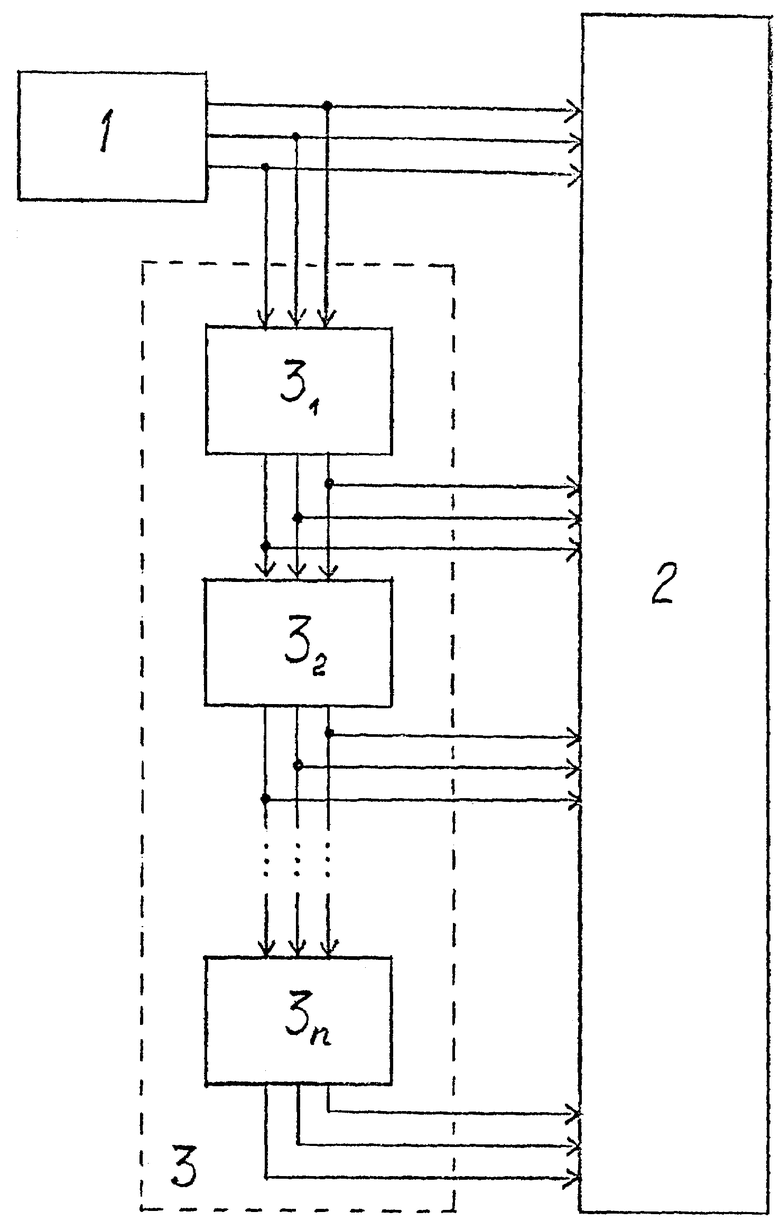
Инерциальная навигационная система, содержащая блок трех акселерометров с ортогональными осями чувствительности, жестко установленный на подвижном объекте, блок определения матрицы угловой ориентации подвижного объекта, отличающаяся тем, что, с целью обеспечения требуемой точности в условиях действия на объект вибраций, в нее дополнительно введены n последовательно соединенных трехканальных интеграторов, задатчик временного режима работы трехканальных интеграторов, блок вычисления производных матрицы угловой ориентации, блок выработки приращений скоростей, блок выработки приращений перемещений, блок выработки координат и скоростей объекта, причем с первого по n+1 входы блока выработки приращений скоростей подключены соответственно к выходу блока трех акселерометров и выходам с первого по n-й трехканальных интеграторов, а с n+2-го по 2n+2 входы блока выработки приращений скоростей подключены соответственно к выходам с первого по n+1 блока вычисления производных матрицы угловой ориентации, куда также подключены с первого по n+1 входы блока выработки приращений перемещений, с n+2 по 2n+2 входы которого подключены к выходам с первого по n-й трехканальных интеграторов, выход блока выработки приращений перемещений подключен к первому входу блока выработки координат и скоростей, ко второму входу которого подключен выход блока выработки приращений скоростей, выход задатчика временного режима работы трехканальных интеграторов подключен ко входу "установка нуля" каждого из n трехканального интегратора, причем входы первого трехканального интегратора соединены с блоком трех акселерометров, соответственно с одним из акселерометров по каждому каналу.
| Помыкаев И.И | |||
| и др | |||
| Навигационные приборы и системы | |||
| М., 1983, стр | |||
| Переставная шейка для вала | 1921 |
|
SU309A1 |

