Предлагаемое изобретение относится к приводам антенны радиолокационной станции обнаружения мобильных зенитных ракетных комплексов. Изобретение может быть использовано в станкостроении и в производстве промышленного оборудования. Техническая задача проектирования привода антенны станции обнаружения цели с 2-я рабочими частотами вращения, в частном случае 0,5 и 1 Гц, характеризуется рядом особенностей:
1) нагрузочный момент сопротивления практически не зависит от частоты вращения при расчетных скоростях ветра до 20-30 м/с, причем скорость ветра кратковременно может превышать расчетную;
2) большая инерционность конструкции антенны;
3) необходимость быстрой фиксации антенны с высокой точностью 1,5-2°;
4) требование обеспечения непрерывной 12-часовой работы в климатических условиях при высокой надежности и минимальных габаритах.
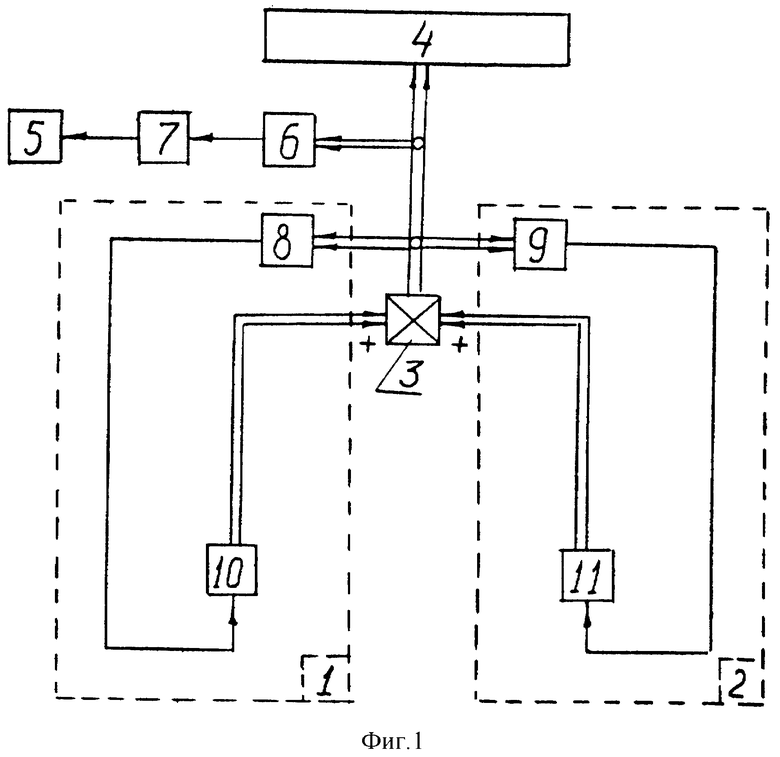
Изложенная задача решается на основе использования широко известного в технике устройства [1], состоящего из двигателя переменного тока, соединенного через 2 (3) параллельных кинематических цепи, каждая из которых содержит электромагнитную муфту сцепления и тормоз, с антенной. При этом обеспечиваются 2 рабочих частоты вращения и одна технологическая для фиксации антенны. Вместе с тем упомянутое устройство не обладает достаточной надежностью, в особенности, в климатических условиях и требуемые электромагнитные муфты отсутствуют среди стандартных (разрешенных к применению) изделий. Поэтому в качестве прототипа нами анализировалось устройство фиг.1, в котором использовали 2 устройства 1 и 2, выполненные в соответствии с [2], причем включение одного устройства обеспечивает частоту 0,5 Гц (как и в целевом назначении упомянутого авт. св.), двух - 1 Гц при сложении на дифференциале 3 углов поворота двух идентичных двигателей. Ползучая скорость и фиксация антенны 4 обеспечиваются устройствами 1 и 2 за счет одновременного пропускания по соединенным звездой обмоткам статоров обоих двигателей переменных и постоянных токов.
Для функционирования цифроаналогового индикатора обзора 5 использованы датчик угла и преобразователь сигналов датчика в код (ПДК). В качестве элементов контроля положения фиксации антенны, как и в [2], используются щеточные контакты токосъемников 8 и 9 выработки управляющих сигналов для приводов 10 и 11. Однако расчеты показали недостаточную надежность устройства, т.к. в связи с возрастанием инерционности антенны и, в особенности, частоты вращения (с 0,5 до 1 Гц), увеличивался выбег антенны при ее торможении с частоты вращения 1 Гц в режиме фиксации. Выбег при отсутствии ветровой нагрузки составил 320-340°, а в общем случае он может превышать 360°, что приводит к увеличению времени работы двигателя в режиме ползучей скорости, понижая его надежность. Кроме того, увеличение выбега антенны свыше 360° нарушает логику фиксации, реализованую в прототипе. Затрудняются в связи с переключением частот условия работы фрикционных тормозов. Не обеспечивается защита от ветровых нагрузок в режиме ползучей скорости.
Таким образом, целью изобретения является повышение надежности и быстродействия фиксации привода антенны. Эта цель достигается тем, что в устройство введены блок задержки, логическая схема И, цифровой вычислительный узел (ЦВУ) и защита двигателя при превышении ветровых нагрузок по отношению к расчетным, при этом входы блока задержки подключены к выходам пульта оператора, и через диод к одному из выходов блока включения и торможения (БВТ) первого двигателя, а один из его выходов соединен со входом второго тормоза, другие два выхода - с блоком включения и динамического торможения (БВД) второго двигателя, и четвертый выход через логическую схему И подключен к разрешающему входу ЦВУ, сигнальный вход которого соединен с выходом ПДК, а его выходы "Реверс" и "Фиксация" соединены с входами БВТ, другие входы которого соединены с пультом оператора, причем один из выходов БВТ подключен к управляющему входу первого тормоза, а второй вход логической схемы И соединен с пультом оператора.
Функциональная схема предлагаемого устройства представлена на фиг.2. Реализация функциональной схемы устройства на релейно-контактных элементах, с применением микроэлектронного программного устройства задержки КТ1, показана на фиг.3.
На чертежах и в тексте приняты следующие обозначения:
1 - антенна РЛСО;
2 - пульт оператора (ПО);
3, 7 - электромагнитные фрикционные тормозы первого, второго двигателей;
4, 9 - первый, второй трехфазные асинхронные двигатели переменного тока;
5 - блок включения и торможения первого двигателя (БВТ);
6 - блок задержки τ0=const
8 - блок включения и динамического торможения второго двигателя (БВД);
10 - логическая схема И;
11 - цифровой вычислительный узел (ЦВУ);
12 - механический дифференциал сложения углов поворота двигателей;
13 - датчик угла (элемент контроля положения фиксации);
14 - преобразователь сигналов датчика в код (ПДК);
15 - цифроаналоговый индикатор обзора (ЦИО).
Предлагаемое устройство состоит из пульта оператора 2, в котором выход 1 предназначен для выключения первого тормоза 3 и подготовки к работе ПО, выходы 2 и 6 для включения первого двигателя 4 и второго, 9, 3 - для подготовки к работе схемы И 10 в режиме "Фиксация", 4 и 5 - для перевода привода в режим "Фиксация" с частотой вращения 1 и 0,5 Гц, вход 1 предназначен для выключения привода при превышении ветровых нагрузок, что осуществляется за счет задерживаемого сигнала с выхода 2 блока включения и торможения 5 первого двигателя, на входы 2 и 1 которого последовательно поступают сигналы "Реверс" и "Фиксация" с выходов 4 и 3 ЦВУ 11, на входы последнего 2 и 1 поступают разрешающий сигнал с выхода логической схемы И 10 и информация об угловом положении антенны с выхода ПДК 14; блок задержки 6 прохождения сигналов с выходов ПО 2, 4 и 5, 6 на вход второго тормоза 7, на рабочий вход 2 схемы совпадения 10 и на входы 1, 2, БВД для динамического торможения, включения двигателя 9; механического дифференциала 12, входы которого через кинематику соединены с двигателями 4, 9, а выход - с антенной.
Устройство работает следующим образом. В процессе подъема антенны 1 из положения "по-походному" срабатывают элемент контроля привода подъема и его исполнительный элемент SA1 (фиг.3) и за счет сигнала с выхода 1 ПО 2 выключается тормоз 3, освобождая кинематику и подготавливая к включению первый двигатель 4. Включение упомянутого двигателя (частоты вращения антенны 0,5 Гц) производится с помощью БВТ 5 сигналом с выхода 2 ПО2, который образуется при срабатывании кнопочного блока 1 ПО и в этом режиме проходит на управляющий орган, включая напряжения двигателя 220 в 400 Гц. Если переключатель частот вращения SA2 был установлен в положение 1 Гц, то, кроме того, сигналы постоянного тока с выходов 2, 6 ПО, проходя через блок задержки (но в этом режиме не задержанные), первый выключает тормоз 7, второй запускает блок задержки и через БВД поступает на две фазы второго двигателя, препятствуя разложению движения первого двигателя. Через интервал времени τ0, достаточный для установления частоты обзора 0,5 Гц и выключения стопора, срабатывает блок задержки 6, выключая динамическое торможение и включая вращение двигателя 9 по управляющему входу 2 БВД 8, устанавливая тем самым частоту обзора 1 Гц. Для фиксации антенны переключатель SA3 устанавливается в соответствующее положение. Тогда сигнал с выхода 3 ПО подготавливает к работе схему И 10, сигнал с выхода 6 снимается, выключая через блок 8 двигатель 9, а на выходе 4 появляется и, благодаря блокированию сигналом с выхода 2 ПО, запускает блок задержки, одновременно осуществляя через БВД динамическое торможение двигателя 9.
Через интервал времени τ0, достаточный для полной остановки двигателя, блок 6 срабатывает, в результате чего снимаются сигналы с его выходов 1 и 3, включая второй тормоз 7 и снимая динамическое торможение, а на выходе 4 сигнал появляется и включает схему совпадения 10, на выходе которой вырабатывается сигнал "Разрешение вкл. ЦВУ". Этот сигнал по входу 2 открывает строб "Реверс" ЦВУ, который при достижении антенной наперед заданного положения, определяемого с помощью датчика угла 13 и ПДК 14, срабатывает и по выходу 4 ЦВУ включает реверс и ползучую скорость двигателя 4, одновременно открывая строб "Фиксация", который при этом положении антенны срабатывает и вырабатывает на выходе 3 сигнал фиксации. Тогда двигатель 4 выключается, а тормоз 3 (и, если это необходимо, динамическое торможение) включаются, вырабатывая сигнал "Укладка". Блок задержки 6, блок 8, двигатель 9 работают аналогично изложенному описанию при смене частот вращения антенны, что удобно проследить по фиг.3. В случае недопустимого увеличения времени движения двигателя 4 в режиме ползучей скорости (больше τ0) сигнал с выхода 2 блока 5, поступая на вход 4 блока задержки 6, вызывает срабатывание и появление на его выходе 5 сигнала, который по входу 1, снимая с блокировки, выключает ПО, и весь привод, за счет снятия сигналов с его выходов 2, 4, 5. Заметим, что в тех случаях, когда время фиксации больше τ0, то необходим отдельный вход блока задержки или второе программное устройство. При необходимости n-скоростного привода в устройство устанавливается n-двигателей n-1 дифференциалов, а управляющая схема практически остается без изменений. Из описания следует, что при фиксации с частоты 1 Гц привод автоматически путем торможения второго двигателя переводится на частоту 0,5 Гц, и только потом первый двигатель включается в режим "Реверса" и включения ползучей скорости. При этом, хотя по отношению к устройству-прототипу момент торможения уменьшился в 2 раза (поскольку торможение с частоты вращения 0,5 Гц до частоты 0,04 Гц осуществляется одним двигателем), но кинематическая энергия вращающихся масс привода  уменьшается в 4 раза, что привело к значительному увеличению быстродействия в режиме "Фиксации", уменьшению выбега антенны и времени работы двигателя в режиме ползучей скорости, упрощению схемы (логики) управления, удобству конструирования, поскольку условия фиксации не зависят от частоты вращения. Кроме того, в предлагаемом устройстве за счет введения связей (без увеличения числа узлов и электроэлементов) реализовано этапирование выключения (включения) двигателей и включения (выключения) электромагнитных тормозов, включения двигателей, что позволило снизить ускорения антенны и перевести упомянутые тормозы в режим статического стопорения, в результате чего уменьшить габариты, стоимость при одновременном повышении надежности привода.
уменьшается в 4 раза, что привело к значительному увеличению быстродействия в режиме "Фиксации", уменьшению выбега антенны и времени работы двигателя в режиме ползучей скорости, упрощению схемы (логики) управления, удобству конструирования, поскольку условия фиксации не зависят от частоты вращения. Кроме того, в предлагаемом устройстве за счет введения связей (без увеличения числа узлов и электроэлементов) реализовано этапирование выключения (включения) двигателей и включения (выключения) электромагнитных тормозов, включения двигателей, что позволило снизить ускорения антенны и перевести упомянутые тормозы в режим статического стопорения, в результате чего уменьшить габариты, стоимость при одновременном повышении надежности привода.
Использование изобретения позволит разработать привод на две частоты вращения с применением стандартных элементов широкого применения при снижении габаритов, веса и повышении надежности. Кроме того, может быть получен экономический эффект и за счет уменьшения количества реле исключения токосъемника, удешевления тормозов.
По данному техническому предложению в соответствии со схемой Фиг.3 изготовлены натурный макет и экспериментальный образец предлагаемого устройства, испытания которых показали высокую точность фиксации -0,5°, выбег нагрузки при торможении в режиме "Фиксации" 82°, время работы двигателя в режиме ползучей скорости при фиксации 5,5 с, время фиксации с частоты вращения 1 Гц составило 7 с. Устройство удовлетворяет всем требованиям, предъявляемым к РЛСО. Выбег нагрузки в устройстве-прототипе согласно экспериментально-расчетным данным (в тех же условиях) составил 320°, время работы двигателя в режиме ползучей скорости - 11 с, время фиксации - 13 с.
Источники информации
1. Траксел, Дж.Дж. Справочная книга по техн. авт. регул. М.-Л., 1962 г.
2. Авторское свидетельство № 1840480, H01Q1/00, 2007 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ АНТЕННЫ КРУГОВОГО ОБЗОРА | 1974 |
|
SU1840480A1 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2321153C1 |
| Устройство для управления электроприводом шлифовально-полировального станка | 1974 |
|
SU717722A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| Система управления опорно-поворотными устройствами антенной установки | 2024 |
|
RU2822869C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2351972C2 |
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2020 |
|
RU2759515C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ НАПРАВЛЕНИЯ ЗЕРКАЛА АНТЕННОГО УСТРОЙСТВА НА ОБЪЕКТ ВИЗИРОВАНИЯ С ОДНОВРЕМЕННЫМ ФОРМИРОВАНИЕМ СИГНАЛОВ ТОРМОЖЕНИЯ ВРАЩЕНИЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ ПРИ КРУГОВОМ ВРАЩЕНИИ ОСНОВАНИЯ АНТЕННОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО ЖЕСТКО ВНУТРИ КОРПУСА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2336611C1 |
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2022 |
|
RU2788578C1 |
| Статический преобразователь частоты для синхронного электропривода | 1983 |
|
SU1164847A1 |

Изобретение относится к приводам антенн радиолокационных станций обнаружения мобильных зенитных ракетных комплексов. Технический результат заключается в повышении быстродействия фиксации привода антенны и его надежности. Сущность изобретения состоит в том, что в устройство, содержащее первый и второй электромагнитные тормозы и асинхронные двигатели, при этом фазные обмотки статора первого двигателя подключены к блоку включения и торможения, который соединен с двумя первыми выходами пульта оператора, введены блок задержки, логическая схема И и цифровой вычислительный узел, при этом входы блока задержки соединены с выходами пульта оператора и блока включения и торможения, а его выходы - со входом второго электромагнитного тормоза, с входами блока включения и динамического торможения, с входом пульта оператора и через схему И с входом цифрового вычислительного узла, вход которого подключен к преобразователю сигналов датчика, а выходы - к входам блока включения и торможения. 3 ил.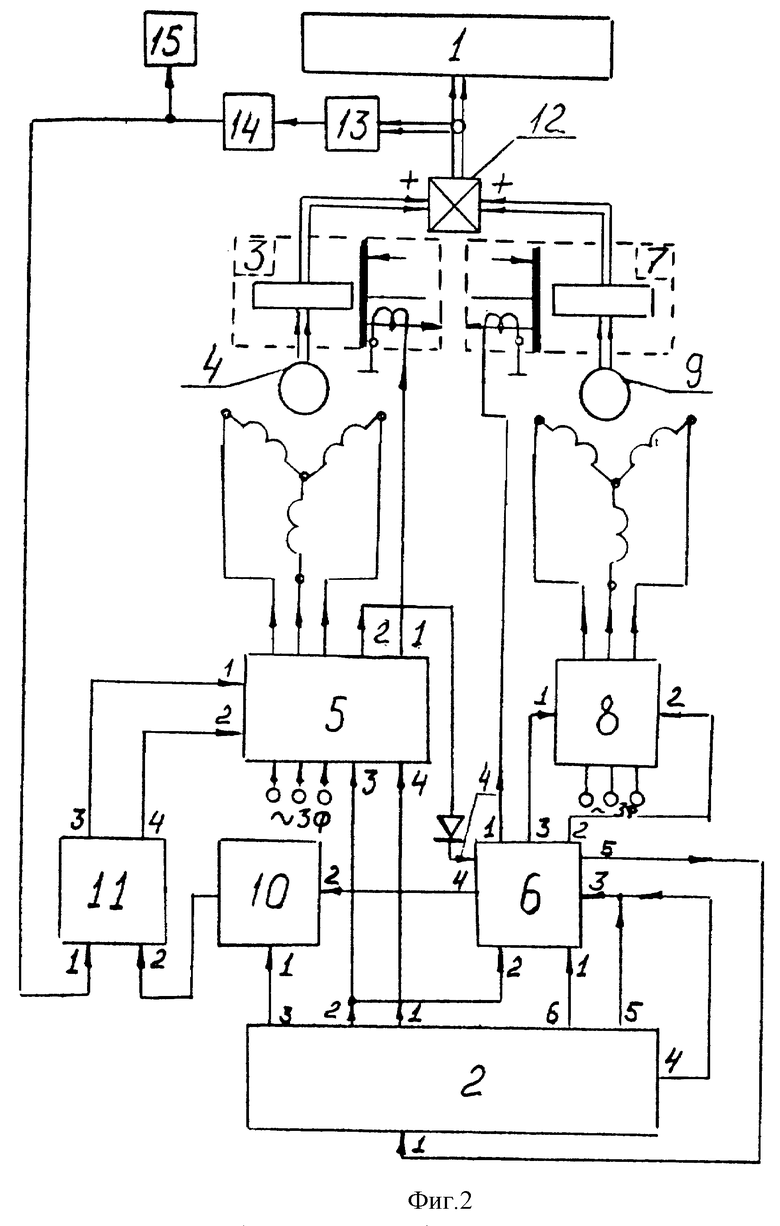
Устройство двухскоростного привода антенны, содержащее первый и второй электромагнитные тормозы и асинхронные двигатели, причем фазные обмотки статора первого двигателя подключены к блоку включения и торможения, который соединен с двумя первыми выходами пульта оператора, а фазные обмотки статора второго двигателя - к блоку включения и динамического торможения, при этом выходы упомянутых двигателей соединены с входами дифференциала, который механически соединен с осью антенны и датчиком угла поворота, соединенного через преобразователь сигналов датчика с цифроаналоговым индикатором обзора, отличающееся тем, что, с целью повышения быстродействия фиксации привода антенны и его надежности, в устройство дополнительно введены блок задержки, логическая схема И, цифровой вычислительный узел, при этом входы блока задержки соединены с выходами пульта оператора и блока включения и торможения, а его выходы соединены со входом второго электромагнитного тормоза, с входами блока включения и динамического торможения, с входом пульта оператора и через схему И с входом цифрового вычислительного узла, вход которого подключен к преобразователю сигналов датчика, а выходы подключены к входам блока включения и торможения.
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ АНТЕННЫ КРУГОВОГО ОБЗОРА | 1974 |
|
SU1840480A1 |

