Предлагаемая система стабилизации и наведения объекта относится к области автоматического регулирования и может быть использована для автоматического наведения и стабилизации.
Известны системы стабилизации и наведения c ограниченным углом поворота, например, танковых пушек, рабочие углы которых находятся в пределах от -5 до +15° (см. стабилизатор 2Э42. Техническое описание БС1.370.008 ТО), или стабилизаторы вертолетных пушек с рабочими углами от -4 до +7° (см. Привод изделия П-800. Руководство по эксплуатации ПБ1.331.082 РЭ).
Для исключения перегрузки привода на предельном угле прокачки, т.е. в режиме, когда объект наведения упирается в механический упор и сигнал управления направлен в сторону упора, в приводах имеются так называемые устройства разгрузки. Устройство разгрузки привода ограничивает сигнал управления приводом в сторону упора до величины, обеспечивающей прижатие привода к упору и исключающей недопустимый перегрев привода. При этом сохраняется нормальное управление в сторону от упора. Сигнал для включения устройства разгрузки обычно подается механическими или электронными концевыми выключателями.
Известны также приводы с ограниченными углами поворота без специального устройства разгрузки на предельных углах и электрических ограничителей (см. Стабилизатор 2Э52. Техническое описание ПБ1.331.092 ТО) с использованием для разгрузки привода на предельных углах схемы интегральной защиты электродвигателя от перегрузки. Такая схема исключает перегрев исполнительного двигателя выше допустимой величины. Однако в этом случае при достижении объектом механического упора схема интегральной защиты ограничивает сигнал управления приводом только при достижении максимально допустимой температуры перегрева электродвигателя, после чего сигнал управления ограничивается на время, необходимое для остывания электродвигателя, а такая потеря времени в боевой обстановке недопустима.
Недостатком систем с электрическими ограничителями является уменьшение диапазона рабочих углов привода на величину разницы между угловым положением механического упора и углом срабатывания электрического ограничителя. Наиболее близкой по технической сущности к заявляемому решению является выбранная в качестве прототипа система (Привод изделия П-800 ПБ1.331.082), где роль электрического ограничителя (см. фиг.1) выполняет электронный компаратор 8, подключенный к датчику положения объекта 1, в котором эксплуатационный разброс уровней срабатывания компаратора 8, вызванный колебаниями питающего напряжения и воздействием климатических факторов, вынуждает значительно усложнять схемные решения электрических ограничителей, увеличивать допуски на углы срабатывания электрического ограничителя, а значит уменьшать диапазоны рабочих углов прокачки объекта наведения. Особенно существенное влияние приобретает этот недостаток в тех случаях, когда диапазон рабочих углов мал (несколько градусов), а устройство с точной установкой электрических углов ограничения (механические концевые выключатели) не удается разместить из-за конструктивных или весовых ограничений, которые особо актуальны для систем летательных аппаратов.
Целью предлагаемого изобретения является расширение диапазона рабочих углов прокачки объекта за счет обеспечения срабатывания устройства разгрузки непосредственно на механическом упоре, а также упрощение привода за счет снижения требований к погрешности срабатывания электрического ограничителя.
Указанная цель достигается тем, что в систему стабилизации и наведения объекта, содержащую последовательно включенные датчик положения объекта, схему управления, устройство разгрузки, усилитель мощности, исполнительный привод и объект, а также первый компаратор, вход которого соединен с выходом датчика положения объекта, и датчик момента, вход которого соединен с выходом усилителя мощности, а выход - со вторым входом схемы управления, введены схема И, первый вход которой соединен с выходом первого компаратора, а выход - со вторым входом устройства разгрузки, и последовательно включенные второй компаратор и схема ИЛИ, выход которой соединен со вторым входом схемы И, причем вход второго компаратора соединен с выходом датчика момента, а второй вход схемы ИЛИ соединен с выходом схемы И.
Сопоставительный анализ с прототипом показывает, что заявляемое решение отличается наличием новых блоков: второго компаратора, схемы И, схемы ИЛИ и их связями с остальными элементами схемы.
Хотя эти новые блоки широко известны, однако при их введении в заявляемое изобретение в указанной связи с остальными элементами схемы для исключения срабатывания устройства разгрузки в диапазоне углов прокачки от электрического ограничителя до механического упора вышеуказанные блоки проявляют новые свойства, что обеспечивает расширение диапазона рабочих углов системы.
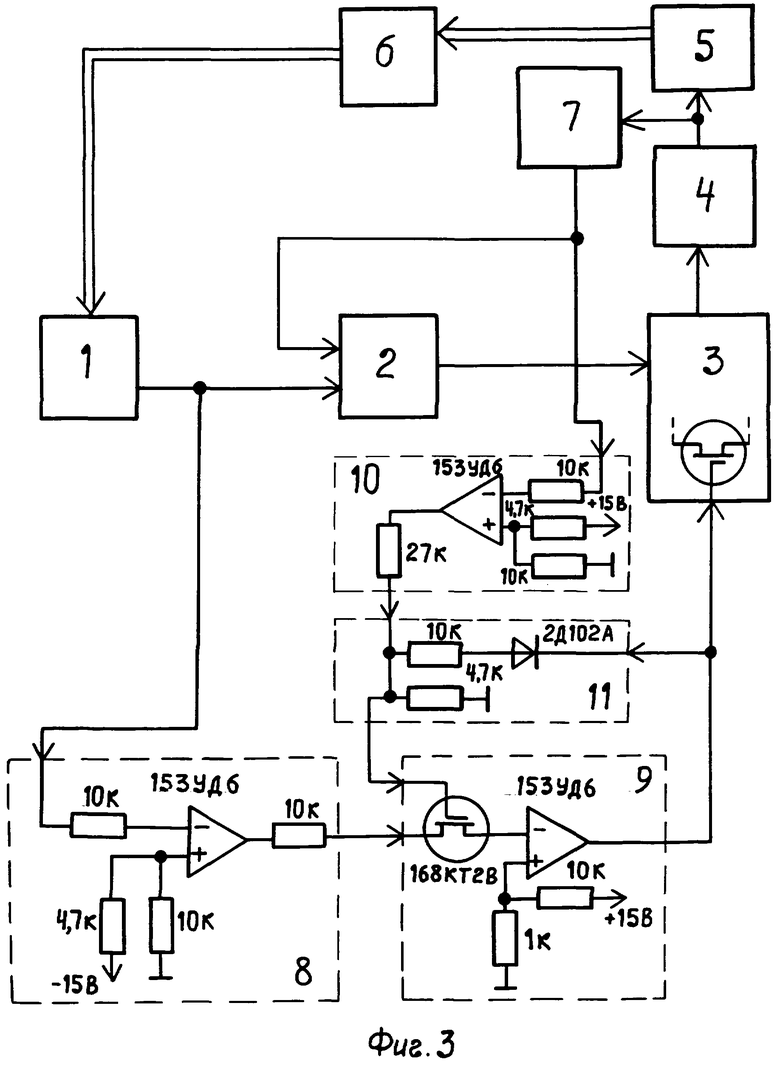
На фиг.1 представлена блок-схема прототипа предлагаемой системы, на фиг.2 - блок-схема предлагаемой системы, а на фиг.3 - ее схемная реализация.
Предлагаемая система (фиг.2) содержит последовательно соединенные датчик положения объекта 1, схему управления 2, устройство разгрузки 3, усилитель мощности 4, исполнительный привод 5 и объект 6.
Кроме того, система содержит: датчик момента 7, вход которого подключен к выходу усилителя мощности 4, а выход - к второму входу схемы управления 2, первый компаратор 8, вход которого подключен к выходу датчика положения объекта 1, а выход - к первому входу схемы И 9, выход которой соединен со входом устройства разгрузки 3, последовательно соединенные второй компаратор 10 и схему ИЛИ 11, выход которой соединен со вторым входом схемы И 9, причем вход второго компаратора 10 соединен с выходом датчика момента 7, а второй вход схемы, ИЛИ 11 соединен с выходом схемы И 9.
Предлагаемая система работает следующим образом. На первый компаратор 8 от датчика положения объекта 1 поступает напряжение, пропорциональное углу поворота объекта 6. При достижении объектом 6 зоны предельного угла поворота данный компаратор срабатывает и на его выходе, а значит и на первом входе схемы И 9, появляется открывающий сигнал. На втором входе схемы И имеется в этот момент сигнал, запирающий схему И за счет уставки второго компаратора 10. При дальнейшем наведении в сторону упора объект упирается в механический упор и на выходе датчика момента 7 (обычно датчик тока в электроприводах или датчик давления в гидроприводах) появляется сигнал, превышающий уставку второго компаратора 10. Компаратор 10 срабатывает и открывающий сигнал с его выхода через схему ИЛИ 11 поступает на второй вход схемы И 9.
После этого на выходе схемы И 9 появляется сигнал, поступающий на устройство разгрузки 3, где происходит ограничение мощности развиваемой приводом в сторону механического упора. Одновременно сигнал с выхода схемы И 9 поступает на второй вход схемы ИЛИ 11, исключая изменение открывающего сигнала на выходе схемы ИЛИ 11, а значит и на втором входе схемы И 9. Дело в том, что после срабатывания устройства разгрузки 3 момент, развиваемый приводом, падает, и сигнал на выходе датчика момента 7 может стать меньше уставки второго компаратора 10. После чего сигнал на его выходе меняет знак. Однако схема ИЛИ 11 обеспечивает в этот момент неизменность открывающего напряжения на втором входе схемы И 9, а значит и на входе устройства разгрузки 3. Тем самым исключаются автоколебания объекта на упоре, которые могли бы иметь место при изменении знака напряжения на выходе второго компаратора.
В предлагаемой системе, благодаря действию схемы ИЛИ 11, исключается переключение устройства разгрузки 3. Действие схемы разгрузки 3 прекращается только после переключения сигнала первого компаратора 8, т.е. после выхода объекта из зоны ограничения углов.
Применение предлагаемой системы позволяет упростить схемные решения за счет снижения требований к погрешности срабатывания электрического ограничения, а также полностью использовать диапазон рабочих углов системы, так как в отличие от систем с обычными электронными компараторами в предлагаемой системе разгрузка происходит при непосредственном достижении объектом механического упора.
Макетирование предлагаемой системы показало ее эффективность для разгрузки на упорах приводов стабилизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ ОБЪЕКТА | 1991 |
|
RU2107248C1 |
| Следящая система наведения | 2023 |
|
RU2815295C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2021 |
|
RU2781092C1 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 2003 |
|
RU2238506C1 |
| Система стабилизации изображения на подвижном основании | 2017 |
|
RU2733324C2 |
| Привод наведения | 2024 |
|
RU2835457C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2224219C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОДНОКАНАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ (ВАРИАНТЫ) | 1995 |
|
RU2111522C1 |

Изобретение относится к области автоматического регулирования и может быть использовано для автоматического наведения и стабилизации объекта. Сущность: устройство содержит последовательно соединенные датчик положения объекта, устройство формирования управляющих сигналов, устройство разгрузки, усилитель мощности, исполнительный привод, объект, первый компаратор и датчик момента. При этом вход первого компаратора соединен с выходом датчика положения объекта, вход датчика момента соединен с выходом усилителя мощности, а выход - со вторым входом устройства формирования управляющих сигналов. Кроме того, в него введены схема И, и последовательно соединенные второй компаратор и схема ИЛИ. При этом первый вход схемы И соединен с выходом первого компаратора, а выход - со вторым входом устройства разгрузки. Выход схемы ИЛИ соединен со вторым входом схемы И. Вход второго компаратора соединен с выходом датчика момента, а второй вход схемы ИЛИ соединен с выходом схемы И. Технический результат - расширение диапазона рабочих углов системы. 3 ил.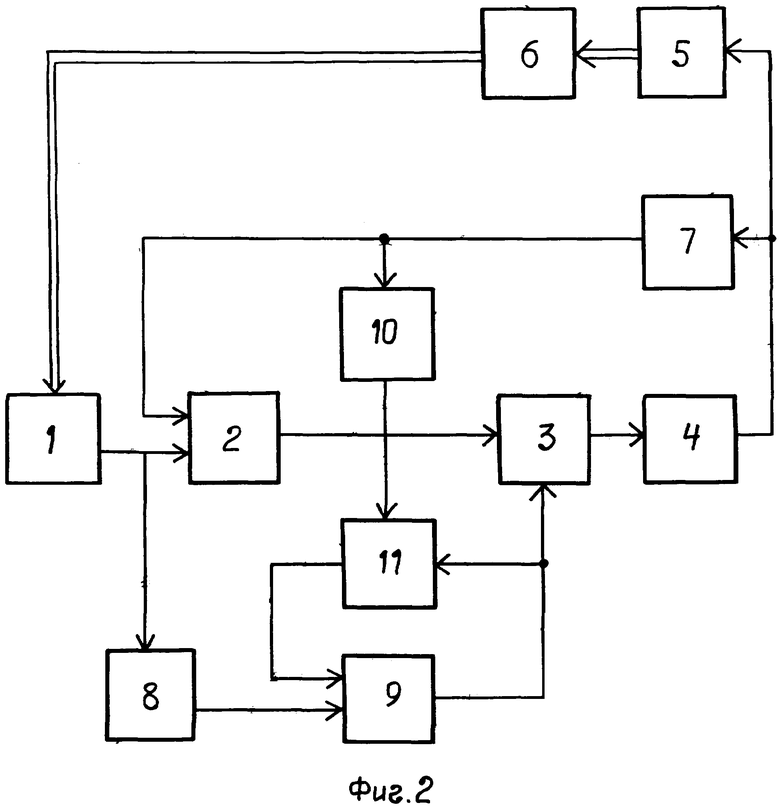
Устройство стабилизации и наведения объекта, содержащее последовательно соединенные датчик положения объекта, устройство формирования управляющих сигналов, устройство разгрузки, усилитель мощности, исполнительный привод и объект, а также первый компаратор, вход которого соединен с выходом датчика положения объекта, и датчик момента, вход которого соединен с выходом усилителя мощности, а выход со вторым входом устройства формирования управляющих сигналов, отличающееся тем, что с целью расширения диапазона рабочих углов системы, в нее введены схема И, первый вход которой соединен с выходом первого компаратора, а выход - со вторым входом устройства разгрузки, и последовательно соединенные второй компаратор, схема ИЛИ, вывод которой соединен со вторым входом схемы И, причем вход второго компаратора соединен с выходом датчика момента, а второй вход схемы ИЛИ соединен с выходом схемы И.
| В.К.Захаров | |||
| Электронные элементы автоматики | |||
| Л.: Энергия, 1975 г., стр.182 | |||
| Ю.А.Рязанов | |||
| Проектирование систем автоматического регулирования М.: Машиностроение, 1968 г., стр.114. |

