Предлагаемая система стабилизации и наведения объекта относительно к области автоматического регулирования и может быть использована для автоматического наведения и стабилизации инерционных объектов с ограниченными углами поворота.
Известны системы стабилизации и наведения объектов с ограниченными углами поворота, в которых рабочий диапазон углов прокачки объекта наведения расширен до углов установки механических ограничителей.
Недостатком этой системы является недостаточна точность ограничения развиваемого приводом момента при достижении объектом наведения механического упора.
Техническим результатом изобретения является повышение точности ограничения действующего при разгрузке на упоре момента, путем введения глубокой отрицательной обратной связи по действующему моменту в зоне механического упора при наведении объекта в сторону механического упора
Указанный технический результат достигается тем, что в систему стабилизации и наведения объекта, содержащую последовательно соединенные датчик положения объекта, устройство формирования управляющих сигналов, усилитель мощности, исполнительный привод, первый компаратор, вход которого соединен с выходом датчика положения объекта, датчик момента, вход которого соединен с выходом усилителя мощности, второй компаратор, вход которого соединен с выходом первого компаратора, дополнительно введен детектор, вход которого соединен с выходом второго компаратора, и выход соединен с вторым входом логической схемы И, выход которой соединен со вторым входом устройства формирования управляющих сигналов.
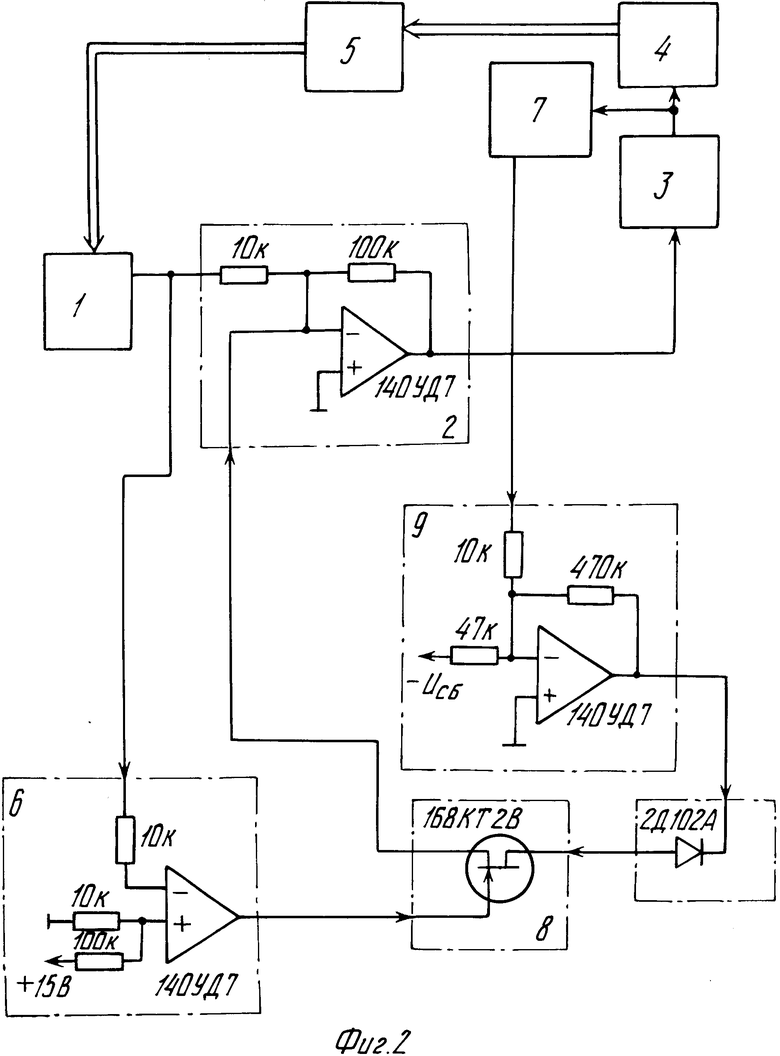
На фиг. 1 представлена блок-схема системы стабилизации и наведения объекта; на фиг. 2 - схемная реализация блок-схемы.
Она содержит датчик 1 положения объекта, устройство 2 формирования управляющих сигналов, усилитель 3 мощности, исполнительный привод 4, объект 5, первый компаратор, датчик момента 7, схему И 8, второй компаратор 9, детектор 10.
Система работает следующим образом. При наведении объекта в сторону механического упора в заданной зоне до упора срабатывает первый компаратор и подает открывающий сигнал на первый вход схемы И. На втором входе схемы И находится закрывающий сигнал. Объект продолжает движение в сторону механического упора без ограничения мощности. При достижении механического упора резко возрастает действующий на привод момент, измеряемый датчиком момента. При превышении моментом заданного допустимого момента, определяемого уставкой второго компаратора, который срабатывает, сигнал на его выходе меняет знак. Этот сигнал через детектор, который включен в проводящем для него направлении, поступает на второй вход схемы И. Схема И представляет собой электронный ключ, который открывается сигналом на первом входе и пропускает в этом случае на свой выход сигнал, поступивший на второй вход.
Таким образом, сигнал с выхода второго компаратора поступает через детектор и схему И на второй вход формирователя управляющих сигналов в противофазе с сигналом датчика положения объекта, что приводит к уменьшению развиваемого приводом момента. Глубина этой отрицательной связи подбирается таким образом, чтобы развиваемый приводом момент в сторону упора ограничивался допустимым для конструкции привода значением. Значение этого момента выставляется уставкой второго компаратора и не зависит от величины входного управляющего сигнала.
Таким образом, в предлагаемой системе происходит разгрузка привода на механическом упоре. При этом не происходит ограничения момента на движение в сторону от упора, т.к. в этом случае не происходит изменения сигнала на выходе второго компаратора, а детектор не пропускает имеющийся там сигнал на второй вход схемы И.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 1996 |
|
RU2095728C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ ОБЪЕКТА | 1988 |
|
SU1840536A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| ДВУХПЛОСКОСТНАЯ СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2150072C1 |
| Следящая система наведения | 2023 |
|
RU2815295C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 2001 |
|
RU2207487C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2145724C1 |
Система стабилизации и наведения объекта повышает точность стабилизации и содержит датчик положения объекта, устройство формирования управляющих сигналов, усилитель мощности, исполнительный привод, два компаратора датчик момента, схему И, дешифратор. 2 ил.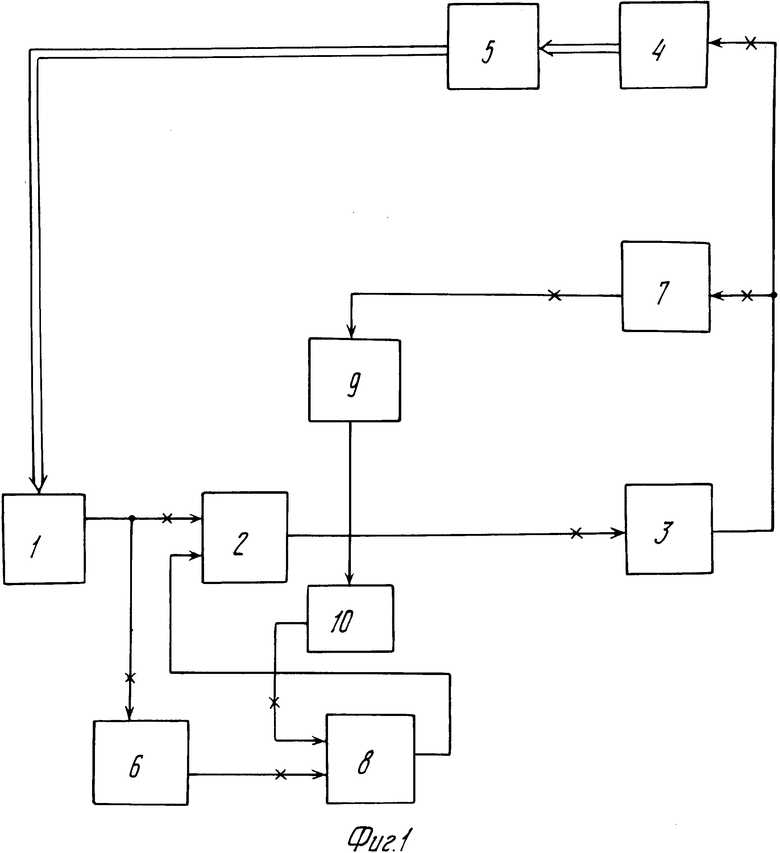
Система стабилизации и наведения объекта, содержащая последовательно соединенные датчик положения объекта, устройство формирования управляющих сигналов, усилитель мощности, исполнительный привод и объект, а также первый компаратор, вход которого соединен с выходом датчика положения объекта, датчик момента, вход которого соединен с выходом усилителя мощности, второй компаратор, вход которого соединен с выходом датчика момента, и логическую схему И, первый вход которой соединен с выходом первого компаратора, отличающаяся тем, что, с целью повышения точности стабилизации, в нее введен детектор, вход которого соединен с выходом второго компаратора, а выход соединен с вторым входом логической схемы И, причем выход логической схемы И соединен с вторым входом устройства формирования управляющих сигналов.
| Патент США N 4326447, F 41 G 5/24, 27.04.82. |
