Изобретение относится к области точного приборостроения, более конкретно - к гироскопическому приборостроению. Преимущественная область использования - бортовые гироприборы летательных аппаратов.
Гироскопы с упругим вращающимся подвесом ротора и, особенно, их разновидность - динамически настраиваемые гироскопы (ДНГ), хорошо известны в технической литературе, см., например, Данилин В.П. и др. "Гироскопические чувствительные элементы", в сб. "Развитие механики гироскопических и инерциальных систем", М., "Наука", 1973, стр.101-103; Брозгуль Л.И., Смирнов Е.Л. "Вибрационные гироскопы", в сб. "История механики гироскопических систем", М., "Наука", 1975, стр.53-54. Такие гироскопы, вследствие ряда положительных качеств, нашли широкое применение в инерциальных навигационных системах США, см., например, обзор "Инерциальные навигационные системы на динамически настраиваемых гироскопах", УДК 629.7.05, "Вопросы ракетной техники", №2, 1974. Как правило, для повышения надежности ДНГ снабжают ограничительными упорами, установленными на приводном валу, см., например, патенты США кл. 74/5 № 3.585.866, 3.618.403.
В технической литературе показано, что основные погрешности гироскопа с упругим вращающимся подвесом связаны с действием момента остаточной жесткости подвеса и момента вязких потерь. Оба этих момента пропорциональны углу отклонения оси ротора гироскопа от оси приводного вала. Это выдвигает повышенные требования к точности и чувствительности системы съема выходной информации.
С точки зрения современных тенденций развития автоматики особый интерес представляют дискретные системы съема, выдающие информацию в виде кода и позволяющие непосредственно использовать выходные сигналы в цифровой вычислительной машине. Такая система съема известна в гироскопической технике, см., например, патент Франции № 1.380.644, 1964 г., G01c. Система содержат специальную маркерную метку, нанесенную на поверхность ротора гироскопа, и считывающие головки, установленные на корпусе. Метки и, соответственно, головки могут быть любой физической природы. Как правило, по каждой измерительной оси устанавливают две головки. При этом информация об угловом положении ротора содержится в разности периодов времени прохождения метки от одной считывающей головки до другой. Каждая считывающая головка формирует импульсный сигнал, и измерение разности периодов осуществляется с помощью эталонных сигналов частоты.
Гироскоп с упругим вращающимся подвесом ротора и дискретной системой съема выходной информации (по патенту Франции №1.380.644, 1964 г.) принят авторами за прототип. Такая система по сравнению с аналогом на основе емкостного датчика имеет более стабильный "нуль", однако обладает некоторыми специфическими недостатками.
Во-первых, при осевых колебаниях ротора гироскопа с частотой вращения приводного вала, связанных, например, с вибрацией шарикоподшипниковых опор, на выходе системы съема появляется нулевой (остаточный) сигнал. Т.е. система реагирует на осевые синхронные колебания ротора точно так же, как на его угловое отклонение. Причем стабильность остаточного сигнала оказывается связанной со стабильностью амплитуды и фазы синхронных вибраций.
Во-вторых, в устройстве-прототипе информация об угловом отклонении появляется на выходе системы с некоторым запаздыванием, поскольку для формирования сигнала маркерная метка должна пройти перед двумя считывающими головками. Поэтому запаздывание составляет, как минимум, период времени Т вращения ротора. Для индикаторных систем стабилизации, построенных на малогабаритных гироскопах с упругим подвесом, такое быстродействие датчика является недостаточным. Для уменьшения запаздывания может быть предложено увеличение скорости вращения гироскопа или числа маркерных меток на роторе. Практика показывает, что оба эти пути неприемлемы. Увеличение оборотов гироскопа выше некоторого разумного предела 15000-30000 об/мин отрицательно сказывается на его эксплуатационных характеристиках: снижается ресурс работы, растут погрешности, связанные с вибрацией, и т.д. Увеличение количества маркерных меток, при современной точности их нанесения на поверхность ротора, приводит к возникновению биений выходного сигнала, что ухудшает работу системы стабилизации,
Целью изобретения является устранение указанных недостатков. Предлагается на приводном валу, а именно на цилиндрической части ограничительного упора нанести дополнительную маркерную метку, а вблизи упора по осям, параллельным измерительным осям гироскопа, установить опорные считывающие головки. Дополнительные головки и метка должны быть аналогичны основным элементам. Поставленная цель достигается за счет того, что измеряется не разность периодов времени прохождения меткой от одной считывающей головки до другой, а интервал времени между моментами прохождения меток на роторе и приводном валу перед основными и дополнительными считывающими головками, установленными в одной плоскости.
На чертеже представлен один из возможных вариантов предлагаемого устройства.
На зеркальной цилиндрической поверхности ротора 1 гироскопа нанесена маркерная метка 2 в виде темной (неотражающей) спиральной линии. Вблизи ротора 1, вдоль одной из его экваториальных осей, называемой измерительной осью, на корпусе 3 гироскопа установлены считывающие головки 4 и 5. На приводном валу 6, а точнее на ограничительном упоре 7, нанесена еще одна маркерная метка 8, аналогичная метке 2. Вблизи упора 7, вдоль оси, параллельной измерительной оси гироскопа, установлены две дополнительные считывающие головки 9 и 10, аналогичные головкам 4, 5. Считывающая головка представляет собой оптоэлектронную пару "излучатель-приемник" ("светодиод-фотодиод").
При вращении ротора в нулевом неотклоненном положении маркерные метки 2, 8 проходят перед каждой парой головок 4, 9 и 5, 10 синхронно, т.е. в одни и те же моменты времени. При угловых отклонениях оси ротора от оси приводного вала метка 2 будет проходить перед считывающей головкой 4 раньше (или позже), чем метка 8 - перед головкой 9, в зависимости от направления углового отклонения. Перед считывающими головками 5, 10 метки проходят в обратной порядке - сначала метка 8 перед головкой 10, затем метка 2 перед головкой 5. Это опережение (отставание) одной метки по отношению к другой в момент "промежуточного финиша", т.е. при прохождении перед считывающими головками, и содержит полезную информацию об угловом отклонении ротора. Разница во времени формирования импульсов считывающими головками 4 и 9 (5 и 10) пропорциональна углу отклонения ротора. Точное измерение этого интервала времени может быть осуществлено с помощью эталонных сигналов частоты.
При осевых синхронных колебаниях гироскопа, вызванных вибрацией шарикоподшипников и опасных для устройства-прототипа, нулевой сигнал на выходе системы не появляется, поскольку ротор гироскопа и приводной вал перемещаются в осевом направлении одинаково, и метки пробегают перед считывающими головками одновременно,
Быстродействие системы съема выходной информации возрастает, поскольку не требуется определять разность полупериодов вращения ротора по сигналам считывающих головок (т.е. осреднять количество импульсов за оборот) - выходной сигнал формируется практически мгновенно в момент прохождения маркерных меток ротора и приводного вала перед соответствующими головками.
Уровень синхронной осевой вибрации, измеренный на экспериментальных образцах известных ДНГ, может составлять 2÷3 д. При скорости вращения ротора 30000 об/мин амплитуда линейных вибраций ротора составляет 2÷3 мк. Это может привести к возникновению нулевого сигнала порядка 30÷40 дуг.с с ожидаемой нестабильностью на уровне 3÷4 дуг.с. При постоянной времени гироскопа 30÷40 с, полученной на образцах, такая нестабильность нуля системы съема будет приводить к добавочной скорости ухода порядка 0,1 дуг.мин/мин. Такая погрешность при современных жестких требованиях к гироприборам весьма ощутима. Предлагаемое устройство позволяет свести указанную ошибку до пренебрежимо малой величины.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2002 |
|
RU2235976C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1977 |
|
RU2107260C1 |
| Способ регулирования изменения углового положения ротора динамически настраиваемого гироскопа, работающего в режиме датчика угловой скорости, вызванного изменением нулевых сигналов его датчиков углов | 2024 |
|
RU2829634C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| Инерциальный измерительный модуль | 2021 |
|
RU2761592C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| Способ уменьшения вибрационных погрешностей гироплатформы на динамически настраиваемых гироскопах | 2020 |
|
RU2750180C1 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| Преобразователь информации динамически настраиваемого гироскопа | 1990 |
|
SU1779929A1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2017 |
|
RU2653155C1 |
Гироскоп с упругим вращающимся подвесом ротора содержит корпус, приводной вал с ограничительным упором и дискретную систему съема выходной информации, состоящую из считывающих головок и маркерных меток. В гироскоп дополнительно введены считывающие головки, установленные в корпусе гироскопа. А также дополнительная маркерная метка, нанесенная на цилиндрической части ограничительного упора. При этом дополнительные считывающие головки расположены вблизи ограничительного упора. Технический результат - повышение точности и быстродействия системы съема. 1 ил.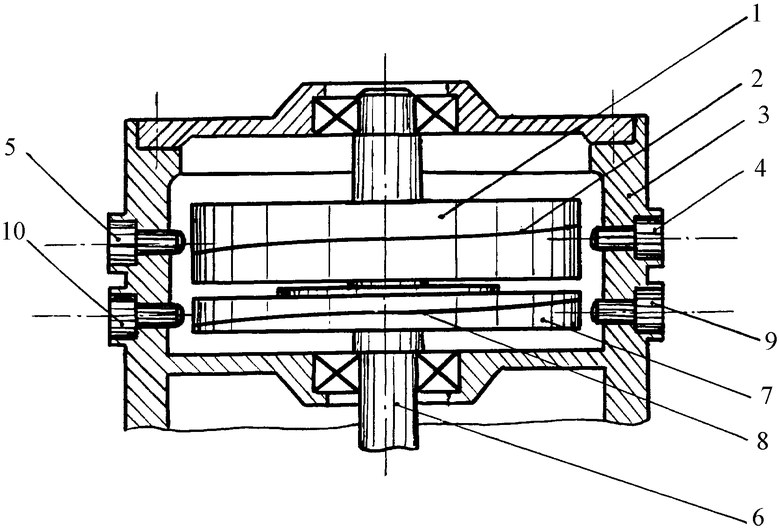
Гироскоп с упругим вращающимся подвесом ротора, содержащий корпус, приводной вал с ограничительным упором и дискретную систему съема выходной информации, состоящую из считывающих головок и маркерных меток, отличающийся тем, что, с целью повышения точности и быстродействия системы съема, в него дополнительно введены считывающие головки, установленные в корпусе гироскопа, и дополнительная маркерная метка, нанесенная на цилиндрической части ограничительного упора, при этом дополнительные считывающие головки расположены вблизи ограничительного упора.
| Способ определения оптимальных сроков воздействия внешних факторов на прорастающие семена сельскохозяйственных культур | 1986 |
|
SU1380644A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

