Изобретение относится к области приборостроения, преимущественно гироскопического, и может быть использовано при создании гироскопических приборов и устройств.
Известен датчик угловой скорости на основе динамически настраиваемого гироскопа (ДНГ-ДУС), образуемого путем замыкания его двух каналов обратными связями (см., например, книгу В.А. Матвеева "Гироскоп - это просто". - МГТУ им. Н.Э. Баумана. - М., 2012. - С. 249-252), каждая из которых содержит датчик угла, усилитель и датчик момента.
На практике в состав обратной связи ДНГ-ДУС входят (см. книгу В.П. Бурмистрова, Н.А. Темлякова "Методы регулировки и испытаний динамически настраиваемых гироскопов. Проектирование ДНГ для платформенных и бесплатформенных инерциальных навигационных систем" М., Технополис Москва. - 2018. - 98-99) датчик угла (ДУ) гироскопа, предварительный усилитель (ПУ), фазовый демодулятор (ФД), усилитель постоянного тока (УПТ), усилитель мощности (УМ) и датчик момента гироскопа. Обратная связь обеспечивает компенсацию моментов, действующих по осям гироскопа. Для уменьшения различного характера погрешностей нулевой сигнал ДУ согласовывают с положением вращающегося ротора гироскопа, когда его ось собственного вращения совпадает с осью вала привода. Это достигается регулировочной операцией по выставке нулевых сигналов ДУ. Метод выставки нулевых сигналов ДУ основан на том, что при достаточно большом значении остаточной жесткости упругого подвеса ротор стремится занять угловое положение, при котором его ось собственного вращения совпадает с осью вала и в этом положении происходит выставка нулевых сигналов ДУ. Для получения большого значения остаточной жесткости выставка нулевых сигналов ДУ проводится при вращении ротора гироскопа на скоростях ниже резонансной скорости вращения на 20-50%. Нулевые сигналы ДУ измеряют при разомкнутой обратной связи. Уменьшение нулевых сигналов в ДУ производят регулировкой мостовых схем, на основе которых они выполнены. Для устранения влияния на точность выставки скорости вращения Земли вектор кинетического момента гироскопа устанавливают по вертикали, а измерительные оси выставляемого ДУ, при этом находится в плоскости горизонта и ориентируется по линии Запад-Восток. В отмеченной выше литературе представленная обратная связь ДНГ имеет пропорциональный закон регулирования. Применение этого закона обуславливает при регулирования статические ошибки по углу наклона ротора, что приводит к погрешностям ДНГ-ДУС при действии на него возмущений.
За прототип взят датчик угловой скорости на базе динамически настраиваемого гироскопа (см. патент RU 2734277 С1, 14.10.2020) с изодромной обратной связью. Применение изодромного закона регулирования уменьшает погрешности, обусловленные статическими углами отклонения ротора ДНГ при действии возмущений. Так, при появлении по входным осям гироскопа ступенчатого вида угловых скоростей, моментов, дрейфа нулевых сигналов оконечных усилителей в установившемся режиме при изодромном регулировании не имеют статических погрешностей в угловом положении ротора. В ДНГ с изодромной обратной связью также проводят предварительную регулировку по согласованию нулевого углового положения ротора с нулевыми сигналами ДУ.
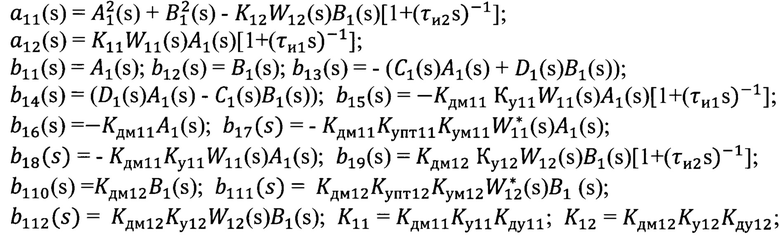
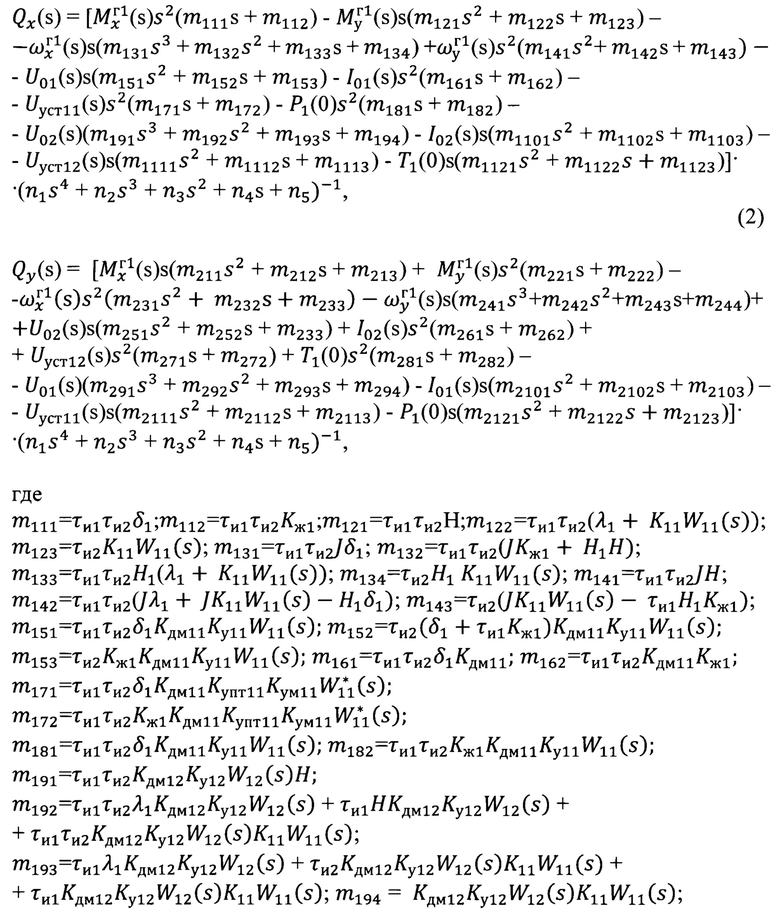
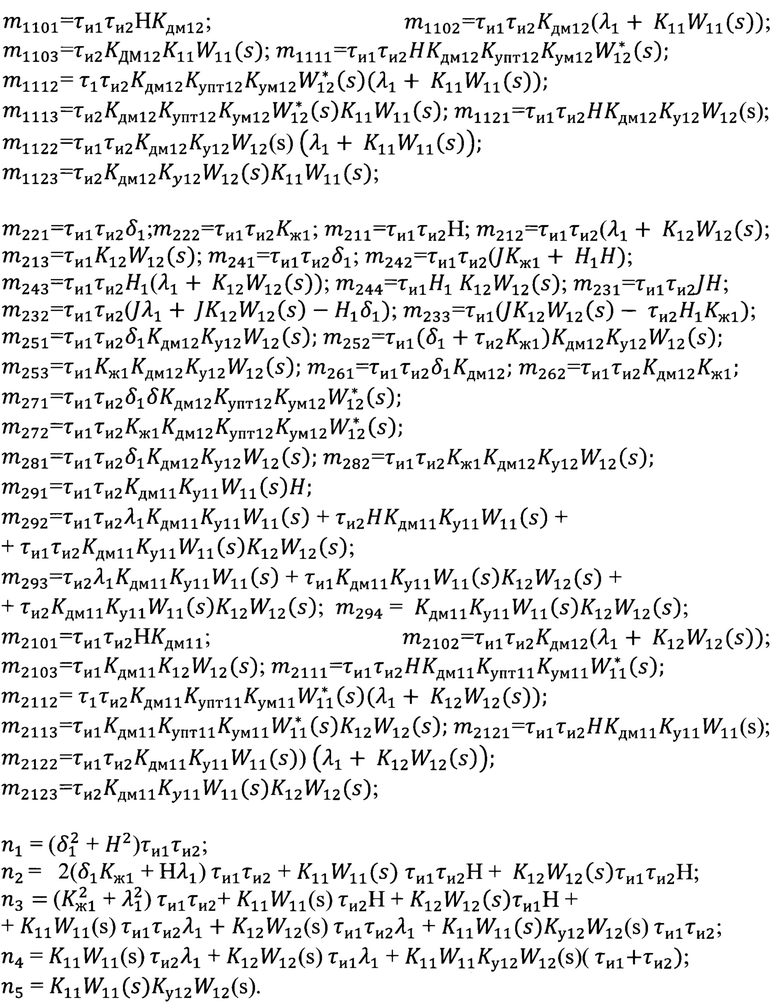
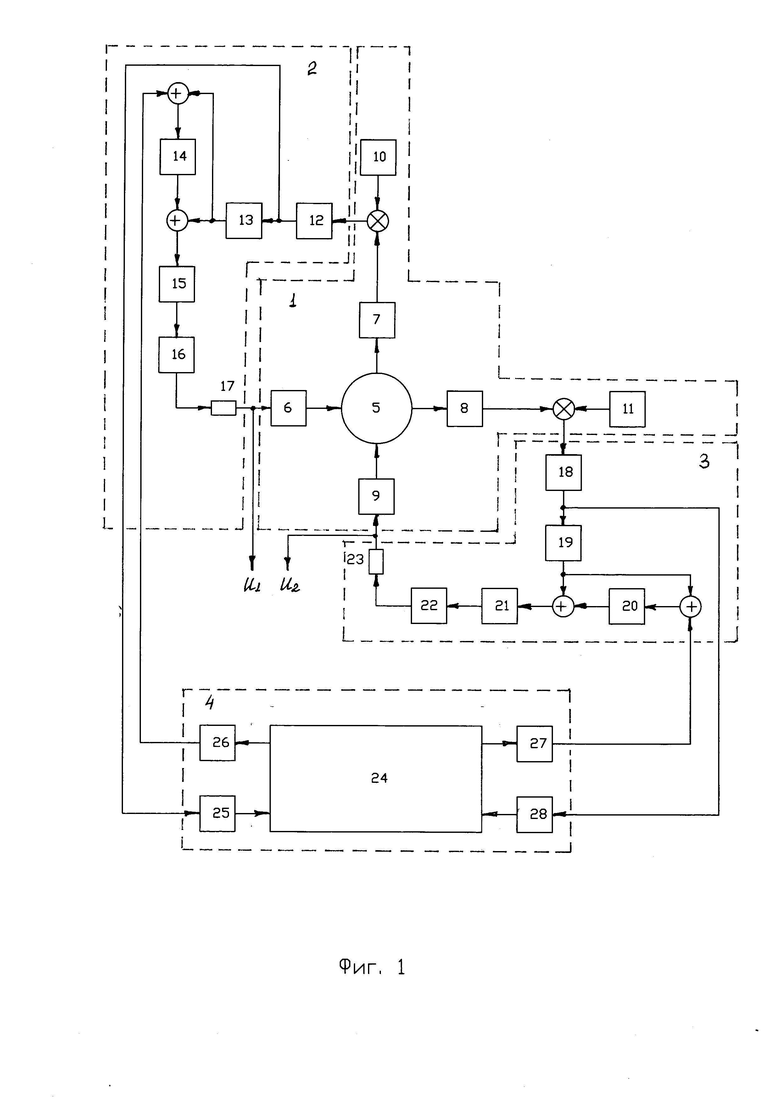
В известном датчике угловой скорости на базе динамически настраиваемого гироскопа регулировочная операция по согласованию нулевого углового положения ротора с нулевыми сигналами датчиков углов каналов выполняют один раз при изготовлении. При эксплуатации ДНГ-ДУС в условиях воздействия перепадов температур, вибрации, ударов может возникать изменение нулевых сигналов датчиков угла, обусловленных деформацией элементов конструкции, изменением положения вала привода в корпусе, старением конструкционных материалов с изменением их физических свойств, изменением электрических характеристик элементов мостовых схем ДУ. Изменение нулевых сигналов ДУ в процессе эксплуатации ДНГ-ДУС в известном способе не контролируют и не регулируют. Применение изодромного регулирования не устраняет наклоны ротора гироскопа при появлении изменений нулевых сигналов в датчиках углов. Это свойство ДНГ-ДУС с изодромной обратной связью можно показать, получив его переходную характеристику, обусловленную появлением ступенчатого нулевого сигнала ДУ. Рассмотрим работу ДНГ-ДУС с функциональной схемой, показанной на фиг. 1. Функциональная схема ДНГ-ДУС с регулятором уставки наклона его ротора содержит: динамически настраиваемый гироскоп 1, электронику 2 первого канала обратной связи по току датчика момента гироскопа, электронику 3 второго канала обратной связи по току датчика момента гироскопа, регулятор уставок 4 наклона ротора. Динамически настраиваемый гироскоп 1 имеет: ротор 5, датчики углов 7, 8 соответственно по первому и второму каналам, датчики моментов 6, 9 соответственно по первому и второму каналам. В датчиках углов имеются источники нулевых сигналов 10, 11. Электронные устройства, входящие в состав обратных связей 2, 3 являются одинаковыми и представляют из себя: предварительные усилители 12, 18, демодуляторы 13, 19, интеграторы 14 и 20, усилители постоянного тока 15 и 21, усилители мощности 16 и 22, эталонные сопротивления 17 и 23. В состав регулятора 4 уставок наклона ротора входят: программируемый управляющий микроконтроллер 24, входные демодуляторы регулятора уставок 25 и 28 первого и второго каналов, выходные интеграторы регулятора уставок 26 и 27 первого и второго каналов. Прецессионные уравнения движения ДНГ-ДУС с изодромными обратными связями в преобразованиях Лапласа в системе координат, связанной с его корпусом, можно представить следующим образом
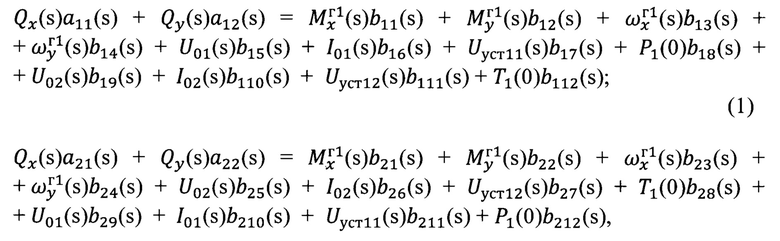
где в преобразованиях Лапласа:
Qx(s), Qy(s) - углы поворота ротора гироскопа относительно корпуса в системе координат, связанной с корпусом;
 - вредные моменты, действующие на ротор в проекциях на оси системы координат, связанной с корпусом;
- вредные моменты, действующие на ротор в проекциях на оси системы координат, связанной с корпусом;
 - проекции абсолютной угловой скорости корпуса гироскопа на оси систем координат, связанных с корпусом;
- проекции абсолютной угловой скорости корпуса гироскопа на оси систем координат, связанных с корпусом;
U01(s), U02(s) - нулевые сигналы датчиков углов по первому и второму каналам;
I01(s), I02(s) - токи в цепях обратных связей от нулевых сигналов усилителей;
Uyст11(s), Uycт12(s) - сигналы уставок на выходах демодуляторов каналов;
Р1(0), P1(0) - нулевые начальные условия по каналам гироскопа;
K11W11(s), K12W12(s) - передаточные функции обратных связей первого и второго каналов по пропорциональному закону регулирования;
 полиномы по степеням комплексной переменной S, имеющие свободные члены, равные единице;
полиномы по степеням комплексной переменной S, имеющие свободные члены, равные единице;
Kду11, Kду12 - масштабные коэффициенты датчиков углов первого и второго каналов гироскопов;
Ку11, Ку12 - общие коэффициенты усиления электронных устройств первого и второго каналов;
Kпу11, Kпу12 - коэффициенты усиления предварительных усилителей первого и второго каналов;
Кд11, Кд12 - коэффициенты усиления демодуляторов первого и второго каналов;
Kду11, Kду12 - коэффициенты усиления усилителей постоянного тока первого и второго каналов;
Kум11, Kум12 - коэффициенты усиления усилителей мощности первого и второго каналов;
W11*(s)=Wупт11(s)Wyм11(s);
W12*(s)=Wупт12 (s)Wум12(s);
A1(s)=δ1s+Kж1; B1(s)=-(Hs+λ1); C1(s)=Js; D1(s)=-N(J+С+Js)=Н1;
J - составляющая момента инерции ротора кардановых рамок относительно оси, лежащей в экваториальной плоскости ротора;
λ1=nD, где
D - коэффициент демпфирования кардановых рамок,
n - количество кардановых рамок;
Kж1 - остаточная жесткость упругого подвеса ДНГ;

С - главный момент инерции ротора ДНГ вокруг оси собственного вращения;
Аn - главный момент инерции n-ой кардановой рамы повеса вокруг ее экваториальной оси;
λ1 - коэффициент характеризующий демпфирование подвеса и момент газодинамического сопротивления вращению ротора и подвеса ДНГ;
N - угловая скорость вала ДНГ;
 где
где
А, В - главные моменты инерции ротора ДНГ вокруг его экваториальных осей,
Сп,Вп - главные моменты инерции n-ой кардановой рамки вокруг оси собственного вращения и экваториальной оси;
τи1, τи2 - постоянные времени интеграторов каналов обратной связи ДНГ.
Разрешая уравнения (1) относительно углов поворота ротора ДНГ, вызванных возмущающими воздействиями, получим
В дальнейшем полагаем, что электроника обратной связи ДНГ является безинерционной, для которой W11(s)=W12(s)=W11*(s)=W12*(s)=1.
При ступенчатых возмущающих воздействиях их изображения имеют вид  Uycт12(s)=Uycт12S-1. Подставим эти изображения ступенчатых воздействий в (2). Тогда согласно теореме о конечном значении установившиеся значения углов поворота ротора ДНГ можно представить следующим образом
Uycт12(s)=Uycт12S-1. Подставим эти изображения ступенчатых воздействий в (2). Тогда согласно теореме о конечном значении установившиеся значения углов поворота ротора ДНГ можно представить следующим образом
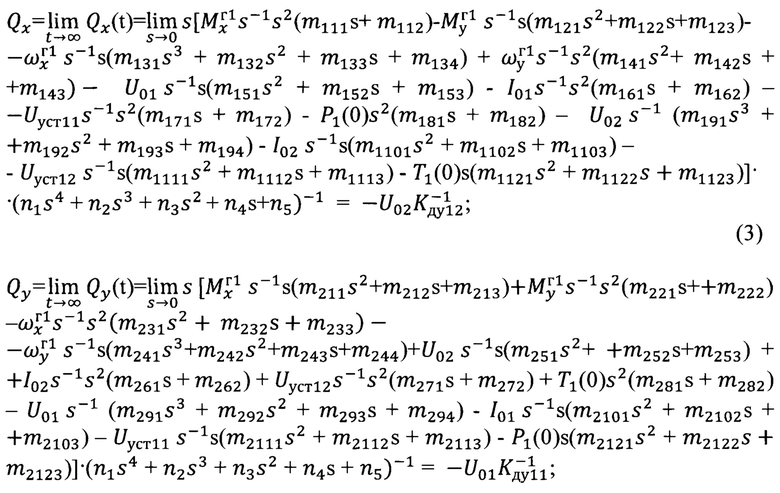
Полученные в выражениях (3) установившиеся значения углов поворота ротора показывают, что применение в ДНГ-ДУС изодромной обратной связи исключает статические ошибки по углу поворота ротора, обусловленные постоянной угловой скоростью, вредными моментами, нулевыми сигналами оконечных усилителей, сигналами уставок на входах интеграторов изодромных каналов обратных связей. Однако при этом имеются статические ошибки по углам поворота ротора, обусловленные нулевыми сигналами датчиков угла. Из выражений (2) выделим ошибки, обусловленные нулевыми сигналами датчиков углов U01(s), U02(s)

Выражения (3), (4) показывают, что ошибки по каналам имеют одинаковый характер и одинаковую величину при одинаковых возмущениях. Поэтому в дальнейшем будем рассматривать ошибку одного канала. Для первого уравнения системы (4) найдем оригинал с помощью вычетов. При скачкообразном изменении нулевого сигнала датчика угла U02=Const получим
а1 а2 - действительные части корней Si характеристического уравнения n1s4+n2s3+n3s2+n4s+n5=0, определяющие затухание;
β1, β2 мнимые части корней Si характеристического уравнения, являющиеся круговой частотой.
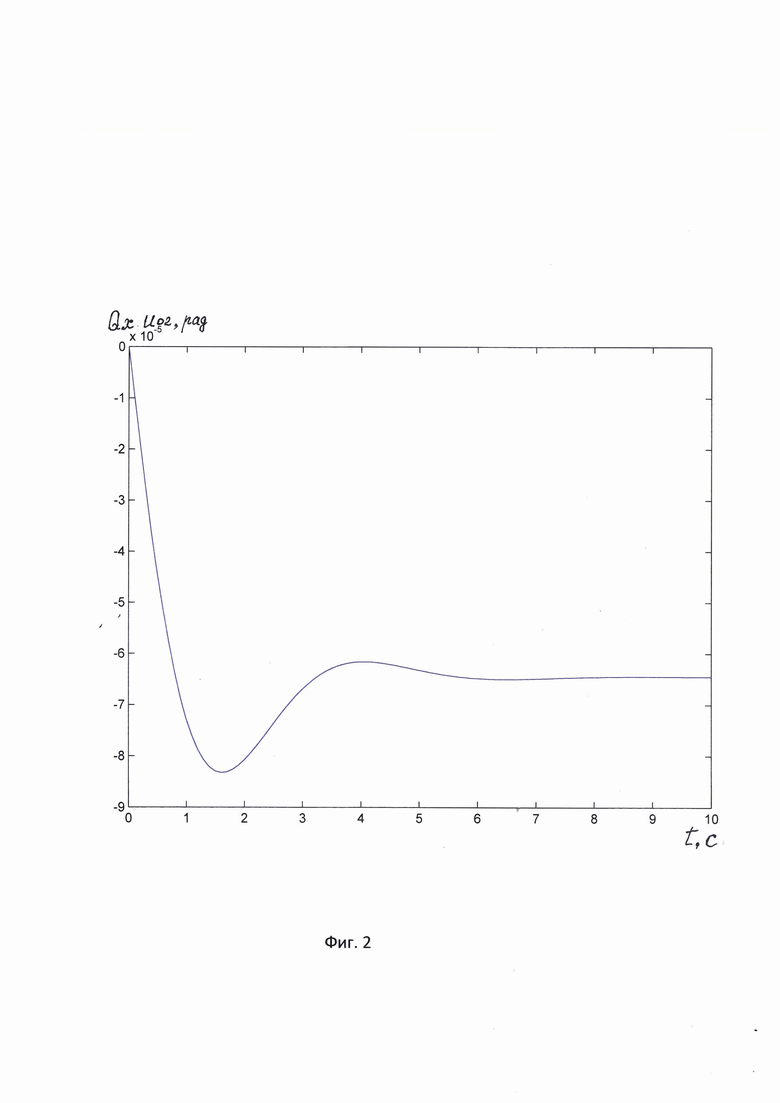
Используя численные значения параметров ДНГ-ДУС с помощью системы Matlab, получен компьютерный расчет по соотношению (5) изменения угла наклона Qx(t)U02 ротора ДНГ, работающего в режиме обратной связи при воздействии ступенчатого нулевого сигнала датчика угла U02=0,001 В, который представлен на фиг. 2. Из зависимости на фиг. 2 видно, что при появлении ступенчатого нулевого сигнала датчика угла величиной 0,001 В установившийся угол наклона ротора гироскопа, работающего с изодромной обратной связью, отклоняется на величину 6,5 радиан (13,41''), что превышает типичные требования, предъявляемые к углам наклона ротора при регулировке нулевых сигналов датчиков углов. В известном способе регулировка нулевых сигналов ДНГ выполняется один раз на стадии его изготовления. При эксплуатации ДНГ-ДУС в условиях воздействия температурных перепадов, вибрации, ударов, старения конструкционных материалов датчиков углов, изменения электрических параметров мостовых схем в которые включены статора датчиков углов происходит изменение значений нулевых сигналов датчиков углов. Эти изменения нулевых сигналов отрабатывает система обратной связи путем наклона ротора от нулевых значений углов, достигнутых при регулировке, что приводит к появлению дополнительных вредных моментов, пропорциональных углам наклона ротора и связанных с остаточной жесткостью упругого подвеса, торможением ротора в газовой среде, газодинамическими воздействиями за счет изменения зазоров между вращающимися и неподвижными частями гироскопа. Применение изодромной обратной связи в ДНГ-ДУС не устраняет наклон ротора, обусловленный изменением нулевых сигналов его датчиков углов в процессе эксплуатации, что приводит к ухудшению точностных характеристик гироскопа.
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является система обратной связи динамически настраиваемого гироскопа с изодромным регулированием, которая не имеет статических ошибок по углу наклона ротора, вызванных в том числе и нулевыми сигналами датчиков углов, за счет применения в обратной связи дополнительного регулятора сигнала уставок, которые формируют в нем, а затем подают на входы интеграторов изодромной обратной связи, что позволяет обеспечивать регулирование с исключением изменений от запуска к запуску нулевого углового положения ротора ДНГ.
Технический результат достигается тем, что в известном способе регулирования изменения углового положения ротора динамически настраиваемого гироскопа, работающего в режиме датчика угловой скорости, вызванного изменением нулевых сигналов его датчиков углов, включающий изодромное регулирование по двум аналоговым каналам обратных связей, каждый из которых имеет датчик углового положения ротора, предварительный усилитель датчика угла, демодулятор, интегратор изодромного канала обратной связи, усилитель постоянного тока, усилитель мощности токового сигнала датчика момента, датчик момента, предварительную регулировку нулевых сигналов датчиков углов при нулевых углах отклонения оси вращения ротора гироскопа от оси вращения приводного вала, выполняемой в режиме разомкнутых обратных связей на нерезонансной частоте вращения ротора, дополнительно предварительно подключают к выходам предварительных усилителей датчиков углов входы регулятора уставок наклона ротора гироскопа, включающего программируемый регулирующий микроконтроллер, входные демодуляторы и выходные интеграторы, выхода которых подсоединяют к интеграторам изодромной обратной связи гироскопа, и после настройки нулевых сигналов датчиков углов в режиме разомкнутых обратных связей на нерезонансной частоте вращения ротора измеряют в регуляторе уставок достигнутые величины настроек нулевых сигналов датчиков углов с демодуляторов регулятора уставок  и запоминают их значения в памяти регулирующего микроконтроллера, выполняют регулировочный запуск гироскопа на резонансной скорости вращения ротора при замкнутых обратных связях и устраняют углы наклона ротора, вызванные погрешностями настройки нулевых сигналов датчиков углов , для чего вычисляют в регулирующем микроконтроллере величины формирующих уставки сигналов
и запоминают их значения в памяти регулирующего микроконтроллера, выполняют регулировочный запуск гироскопа на резонансной скорости вращения ротора при замкнутых обратных связях и устраняют углы наклона ротора, вызванные погрешностями настройки нулевых сигналов датчиков углов , для чего вычисляют в регулирующем микроконтроллере величины формирующих уставки сигналов 
которые подают на входы интеграторов соответственно первого и второго каналов регулятора уставок и получают на его выходах сигналы уставок

направляемых на входы интеграторов изодромных каналов обратных связей гироскопа, затем определяют угол наклона ротора от полученного его нулевого положения до вращающегося упора для чего вычисляют в управляющем микроконтроллере величины формирующих уставки сигналов, с помощью которых отклоняют ротор до вращающегося упора,

и запоминают их в памяти регулирующего микроконтроллера, отклоняют ротор гироскопа в положительном направлении по входной оси его первого канала от исходного нулевого угла наклона ротора путем подачи сигнала  с регулирующего микроконтроллера на вход интегратора первого канала регулятора уставок и после касания ротором вращающегося упора в регуляторе уставок измеряют величину максимального сигнала
с регулирующего микроконтроллера на вход интегратора первого канала регулятора уставок и после касания ротором вращающегося упора в регуляторе уставок измеряют величину максимального сигнала  с демодулятора первого канала регулятора уставок и запоминают этот сигнал в памяти микроконтроллера, отключают сигнал
с демодулятора первого канала регулятора уставок и запоминают этот сигнал в памяти микроконтроллера, отключают сигнал  от входа интегратора первого канала регулятора уставок, отклоняют ротор гироскопа в положительном направлении по входной оси второго канала от исходного нулевого угла наклона ротора, для чего подают сигнал
от входа интегратора первого канала регулятора уставок, отклоняют ротор гироскопа в положительном направлении по входной оси второго канала от исходного нулевого угла наклона ротора, для чего подают сигнал  с регулирующего микроконтроллера на вход интегратора второго канала регулятора уставок и после момента касания ротором вращающегося упора в регуляторе уставок измеряют сигнал
с регулирующего микроконтроллера на вход интегратора второго канала регулятора уставок и после момента касания ротором вращающегося упора в регуляторе уставок измеряют сигнал  с демодулятора второго канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал
с демодулятора второго канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал  от входа интегратора регулятора уставок второго канала, а в рабочем режиме при каждом i-том запуске гироскопа, работающего на резонансной частоте скорости вращения ротора с замкнутыми обратными связями по каналам, определяют изменение между угловым положением ротора при рабочем нулевом сигнале с датчиков углов и угловым положением ротора при его касании вращающегося упора для этого до времени достижения точностной готовности гироскопа отклоняют ротор сперва по входной оси первого канала от исходного угла наклона ротора
от входа интегратора регулятора уставок второго канала, а в рабочем режиме при каждом i-том запуске гироскопа, работающего на резонансной частоте скорости вращения ротора с замкнутыми обратными связями по каналам, определяют изменение между угловым положением ротора при рабочем нулевом сигнале с датчиков углов и угловым положением ротора при его касании вращающегося упора для этого до времени достижения точностной готовности гироскопа отклоняют ротор сперва по входной оси первого канала от исходного угла наклона ротора  для этого подают сигнал
для этого подают сигнал  с регулирующего микроконтроллера на вход интегратора первого канала регулятора уставок и после момента касания ротором вращающегося упора в регуляторе уставок измеряют величину максимального сигнала
с регулирующего микроконтроллера на вход интегратора первого канала регулятора уставок и после момента касания ротором вращающегося упора в регуляторе уставок измеряют величину максимального сигнала  с демодулятора первого канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал
с демодулятора первого канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал  от входа интегратора первого канала регулятора уставок, отклоняют ротор гироскопа в положительном направлении по входной оси второго канала от исходного угла
от входа интегратора первого канала регулятора уставок, отклоняют ротор гироскопа в положительном направлении по входной оси второго канала от исходного угла  для чего подают сигнал
для чего подают сигнал  с регулирующего микроконтроллера на вход интегратора второго канала регулятора уставок и после момента касания ротором вращающегося упора измеряют в регуляторе уставок сигнал
с регулирующего микроконтроллера на вход интегратора второго канала регулятора уставок и после момента касания ротором вращающегося упора измеряют в регуляторе уставок сигнал  с демодулятора второго канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал
с демодулятора второго канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал  от входа интегратора регулятора уставок второго канала, после этого обеспечивают нулевое угловое положение ротора динамически настраиваемого гироскопа в i-том запуске при наличии нулевых сигналов его датчиков углов, для чего вычисляют в микроконтроллере формирующие уставки сигналы
от входа интегратора регулятора уставок второго канала, после этого обеспечивают нулевое угловое положение ротора динамически настраиваемого гироскопа в i-том запуске при наличии нулевых сигналов его датчиков углов, для чего вычисляют в микроконтроллере формирующие уставки сигналы

которые подают на входы интеграторов первого и второго каналов регулятора уставок до окончания i-гo запуска и получают на входах интеграторов изодромных каналов обратных связей гироскопа сигналы уставок, устанавливающие ротор в нулевое угловое положение, в следующем виде

где

Кд11, Кд12 - коэффициенты усиления демодуляторов по первому и второму каналам обратных связей гироскопа;
Кдр11, Кдр12 - коэффициенты усиления демодуляторов регулятора уставок по первому и второму каналам:
Кду11, Кду12 - масштабные коэффициенты датчиков углов гироскопа по первому и второму каналам;
Кпу11, Кпу12 - коэффициенты усиления предварительных усилителей датчиков углов по первому и второму каналам гироскопа;
 - максимальные величины по конструкторской документации углов наклона ротора до вращающегося упора по его осям;
- максимальные величины по конструкторской документации углов наклона ротора до вращающегося упора по его осям;
τи1, τи2 - постоянные времени интеграторов первого и второго изодромных каналов обратных связей гироскопа;
τир1, τир2 - постоянные времени интеграторов регулятора уставок по первому и второму каналам.
Рассмотрим работу динамически настраиваемого гироскопа с изодромной обратной связью, к которой подключен регулятор уставок наклона ротора, как показано на фиг. 1. Проанализируем работу одного канала гироскопа, так как оба канала имеют одинаковую структуру, и полученные результаты для одного канала будут распространяться и на другой канал. Согласно выражению (2) для второго канала ДНГ-ДУС будем иметь следующую зависимость в изображения Лапласа угла Qx(s)Uycт12 наклона ротора от подаваемого на вход интегратора изодромной обратной связи сигнала UycTl2(s) уставки

При линейном изменении сигнала уставки Uуст12(t)=Kуст12t, Uycт12(s)= Kуст12s-2 выражение (11) представим в виде

Для выражения (12) найдем оригинал с помощью вычетов, который будет иметь вид
Из полученного выражения (13) видно, что при подаче на вход интегратора изодромной обратной связи ДНГ сигнала уставки в виде линейной зависимости Uyст12(t)=Kyст12t появляется постоянный угол наклона ротора гироскопа

величину и знак которого можно изменять, изменяя знак и величину коэффициента пропорциональности Куст12. Аналогичное изменения угла наклона ротора происходит и по другому каналу при подаче на вход его интегратора сигнала уставки Uyст11(t)=Kycт11t, которое можно представить в виде

Получим, представленные ранее, соотношения (6), (7), (8), (9), (10), используя выражения (14), (15). Пусть с помощью предлагаемой схемы обратной связи ДНГ-ДУС, показанной на фиг. 1, имеющей регулятор уставок наклона ротора, в режиме разомкнутых обратных связей на нерезонансной частоте вращения ротора измерили в регуляторе уставок достигнутые величины настроек нулевых сигналов датчиков углов в виде сигналов  с демодуляторов регулятора уставок. Определим сигналы уставок, которые необходимо подать на входы интеграторов обратных связей первого и второго каналов ДНГ-ДУС, чтобы устранить наклон ротора, связанный с сигналами
с демодуляторов регулятора уставок. Определим сигналы уставок, которые необходимо подать на входы интеграторов обратных связей первого и второго каналов ДНГ-ДУС, чтобы устранить наклон ротора, связанный с сигналами  при работе гироскопа уже на резонансной частоте скорости вращения ротора и замкнутых обратных связях. Сигналам соответствуют следующие нулевые сигналы с мостовых схем датчиков углов
при работе гироскопа уже на резонансной частоте скорости вращения ротора и замкнутых обратных связях. Сигналам соответствуют следующие нулевые сигналы с мостовых схем датчиков углов

При работе ДНГ в режиме замкнутой обратной связи эти нулевые сигналы датчиков углов обусловят следующие углы наклона ротора

С учетом (16) представим (17) в виде

Эти углы наклона ротора гироскопа согласно (14), (15) можно устранить с помощью уставок

которые также согласно (14), (15) обеспечат наклон ротора

Для устранения углов  необходимо выполнить условие
необходимо выполнить условие

Для определения  подставим в (21) выражения (18), (20)
подставим в (21) выражения (18), (20)

Подставим в (22) значения для т1113, т2цз, п5 из (2) и после преобразований получим

Из (23) определим

Тогда искомые значения уставок согласно (19) будут иметь вид

которые определяют выражение (7).
Так как  являются выходными сигналами интеграторов регулятора уставок, то входными сигналами этих интеграторов будут
являются выходными сигналами интеграторов регулятора уставок, то входными сигналами этих интеграторов будут

которые определяют выражение (6) и обеспечивают устранение углов 
 Для выработки сигналов на входах интеграторов регулятора уставок, которые обеспечивают наклон ротора до вращающегося упора берут из конструкторской документации на ДНГ максимальные величины этих углов. Определим сигналы уставок, с помощью которых можно повернуть ротор на углы
Для выработки сигналов на входах интеграторов регулятора уставок, которые обеспечивают наклон ротора до вращающегося упора берут из конструкторской документации на ДНГ максимальные величины этих углов. Определим сигналы уставок, с помощью которых можно повернуть ротор на углы  Согласно (20)
Согласно (20)

Из (27) получим

Уставки в этом случае будут иметь вид

Так как  являются выходными сигналами интеграторов регулятора уставок, то входными сигналами этих интеграторов соответственно будут
являются выходными сигналами интеграторов регулятора уставок, то входными сигналами этих интеграторов соответственно будут

которые определяют выражение (8) и обеспечивают наклон ротора до вращающегося упора.
В рабочем режиме при каждом i-том запуске гироскопа отклоняют ротор от его исходного углового положения  до вращающегося упора последовательно по каждому каналу и измеряют сигналы с демодуляторов регулятора уставок
до вращающегося упора последовательно по каждому каналу и измеряют сигналы с демодуляторов регулятора уставок  после касания ротором вращающегося упора.
после касания ротором вращающегося упора.
Предварительно в регулировочном запуске были определены с демодуляторов уставок сигналы  характеризующих углы наклона ротора от нулевого положения до вращающегося упора. Углы от положения ротора в i-том запуске до вращающегося упора определяются как
характеризующих углы наклона ротора от нулевого положения до вращающегося упора. Углы от положения ротора в i-том запуске до вращающегося упора определяются как

Разность между углами ротора до вращающегося упора в i-том запуске и регулировочном запуске


Используя (20) определим
С учетом (18), (31), (32)

Подставляя в (34) значения для т1113, т2ц3, п5 из (2) и преобразуя, получим


Так как  являются выходными сигналами интеграторов регулятора уставок, то входными сигналами этих интеграторов будут соответственно
являются выходными сигналами интеграторов регулятора уставок, то входными сигналами этих интеграторов будут соответственно

Выражения (35), (36), (37) характеризуют выражения (10), (9) и вырабатываются в микроконтроллере.
Проведены компьютерные исследования предлагаемого способа регулирования изменения углового положения ротора ДНГ-ДУС, вызванного изменением нулевых сигналов его датчиков углов. Для этого использовалось выражение

или с учетом (5) и (13)
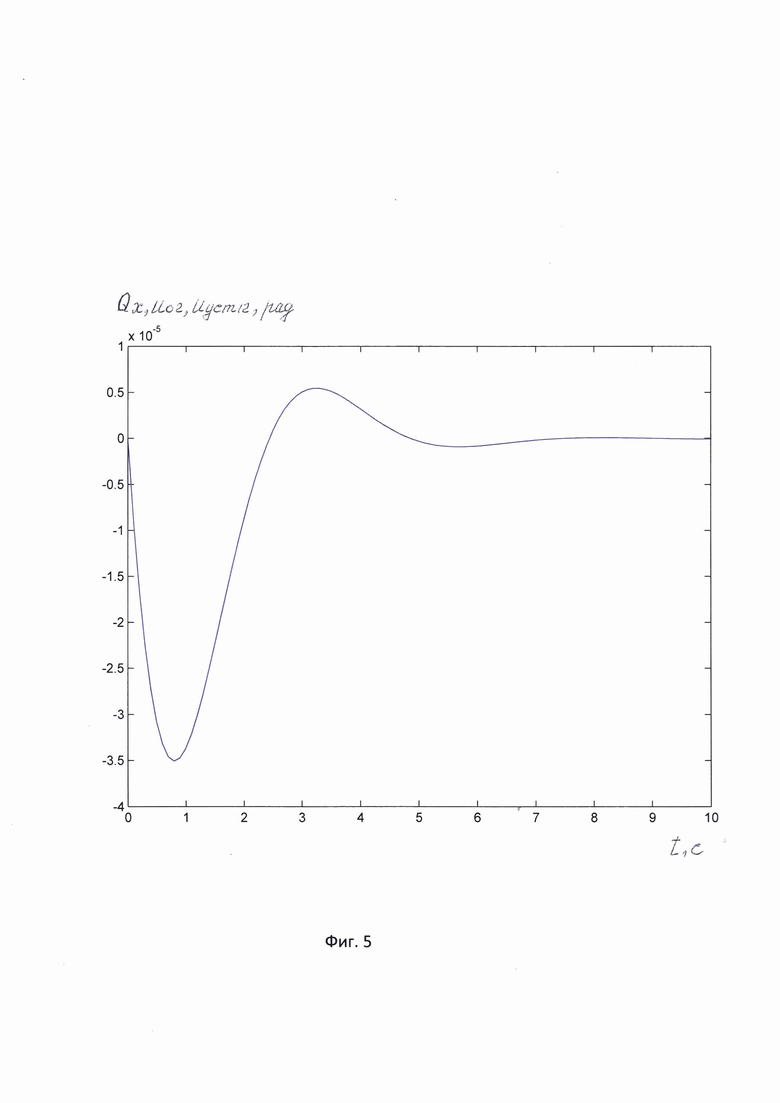
На основе выражения (39) в системе Matlab была разработана программа для численного вычисления Qx(t)U02,Uуст12. Задавали ступенчатый нулевой сигнал датчика угла второго канала гироскопа U02=0,001 В. Этот сигнал при работе гироскопа в режиме замкнутой обратной связи вызывал отклонение ротора гироскопа на угол Qx=0,6448⋅10-4 рад. Используя значение Qx коэффициент Куст12 и сигнал уставки Uyст12 определяли с помощью выражений (28), (29). На фиг. (5) показано, рассчитанное на компьютере изменение угла наклона ротора ДНГ-ДУС при воздействии ступенчатого нулевого сигнала датчика угла U02=0, 001 В и подаче на вход интегратора изодромной обратной связи сигнала уставки, изменяющейся по линейному закону Uyст12=0,059t. Сравнение представленных на фиг. 2 и 5 зависимостей показывает, что предлагаемый способ позволяет устранить наклон ротора в ДНГ-ДУС с изодромной обратной связью, обусловленного появлением нулевого сигнала датчика угла гироскопа. Аналогичным образом устраняют наклон ротора, вызванный нулевым сигналом датчика угла и по другому каналу гироскопа.
Таким образом, предлагаемый способ регулирования изменения углового положения ротора динамически настраиваемого гироскопа, работающего в режиме датчика угловой скорости, вызванного изменением нулевых сигналов его датчиков углов, имеет следующие отличия от известного способа:
1.В подготовительных операциях введены следующие новые действия:
- подключают к выходам предварительных усилителей обратных связей гироскопа дополнительно регулятор уставок наклона ротора, вырабатывающий сигналы уставок, подаваемые на входы интеграторов изодромных каналов обратных связей;
- обеспечивают автоматическое регулирование сигналов уставок в зависимости от нулевых сигналов датчиков углов;
- используют в регуляторе уставок микроконтроллер, демодуляторы регулятора и интеграторы регулятора;
- измеряют величины ошибок настроек нулевых сигналов датчиков углов, используя сигналы демодуляторов регулятора уставок в режиме разомкнутых обратных связей гироскопа на нерезонансной частоте вращения его ротора;
- вычисляют в микроконтроллере сигналы, формирующие уставки, соответствующие величинам погрешностей настроек нулевых сигналов датчиков углов, для чего используют сигналы с демодуляторов регулятора уставок;
- подают с микроконтроллера формирующие сигналы на входы интеграторов регулятора уставок для получения на их выходах линейно изменяющихся сигналов уставок;
- направляют линейно изменяющиеся сигналы уставок на входы интеграторов изодромных обратных связей гироскопа для установки его ротора в нулевое положение при наличии ошибок настройки нулевых сигналов датчиков углов;
- вычисляют в управляющем микроконтроллере сигналы, подаваемые на входы интеграторов регулятора уставок, обеспечивающие наклон ротора гироскопа от нулевого положения до вращающегося упора, используя максимальные значения углов до вращающегося упора из технической документации на гироскоп;
- запоминают значения сигналов, обеспечивающих наклон ротора из нулевого положения до вращающегося упора в памяти микроконтроллера;
- подают сигнал, обеспечивающий наклон ротора из нулевого положения до вращающегося упора, с регулирующего микроконтроллера на вход интегратора первого канала регулятора уставок;
- измеряют максимальный сигнал с демодулятора первого канала регулятора уставок после касания ротором вращающегося упора;
- запоминают в памяти микроконтроллера максимальный сигнал с демодулятора первого канала регулятора уставок после касания ротором вращающегося упора;
- отключают сигнал, обеспечивающий наклон ротора от нулевого положения до вращающегося упора от входа интегратора первого канала регулятора уставок;
- подают сигнал с регулирующего микроконтроллера на вход интегратора второго канала регулятора уставок, обеспечивающего наклон из нулевого положения до вращающегося упора;
- измеряют максимальный сигнал с демодулятора второго канала регулятора уставок после касания ротором вращающегося упора;
-запоминают максимальный сигнал в памяти микроконтроллера с демодулятора второго канала регулятора уставок после касания ротором вращающегося упора;
- отключают сигнал, обеспечивающий наклон ротора из нулевого положения до вращающегося упора от входа интегратора второго канала регулятора уставок;
2. В рабочем режиме ДНГ-ДУС при каждом запуске гироскопа введены следующие новые действия:
- отклоняют ротор гироскопа в положительном направлении сперва по первому каналу от исходного угла наклона, обусловленного нулевыми сигналами датчиков углов, для чего подают с регулирующего микроконтроллера на вход интегратора первого канала регулятора уставок сигнал, обеспечивающий наклон ротора до вращающегося упора;
- измеряют максимальный сигнал с демодулятора первого канала регулятора уставок после касания ротором вращающегося упора и запоминают его в памяти микроконтроллера;
- отключают сигнал, обеспечивающий наклон ротора до вращающегося упора от исходного положения, обусловленного нулевыми сигналами датчиков углов, от входа интегратора первого канала регулятора уставок;
- отклоняют ротор гироскопа в положительном направлении по второму каналу от исходного угла наклона, обусловленного нулевыми сигналами датчиков углов, для чего подают с регулирующего микроконтроллера на вход интегратора второго канала регулятора уставок сигнал, обеспечивающий наклон ротора до вращающегося упора;
- измеряют максимальный сигнал с демодулятора второго канала регулятора уставок после касания ротором вращающегося упора и запоминают его в памяти микроконтроллера;
- отключают сигнал, обеспечивающий наклон ротора до вращающегося упора от исходного положения, обусловленного нулевыми сигналами датчиков углов, от входа интегратора второго канала регулятора уставок;
- вычисляют в микроконтроллере сигналы формирования уставок, используя запомненные в памяти микроконтроллеры сигналы с демодуляторов регулятора уставок по каналам после касания ротором вращающегося упора;
- подают на входы интеграторов первого и второго каналов регулятора уставок сигналы формирования уставок и получают на их выходах сигналы уставок, которые подают на входы интеграторов изодромных каналов обратных связей гироскопа для обеспечения нулевого углового положения ротора при наличии нулевых сигналов датчиков углов.
На фиг. 1 показана функциональная схема датчика угловой скорости на основе динамически настраиваемого гироскопа с регулятором уставки наклона его ротора.
На фиг. 2 представлено изменение угла наклона ротора динамически настраиваемого гироскопа, работающего в режиме изодромных обратных связей по токам датчиков моментов, при воздействии ступенчатого нулевого сигнала датчика угла U02 - 0,001 В.
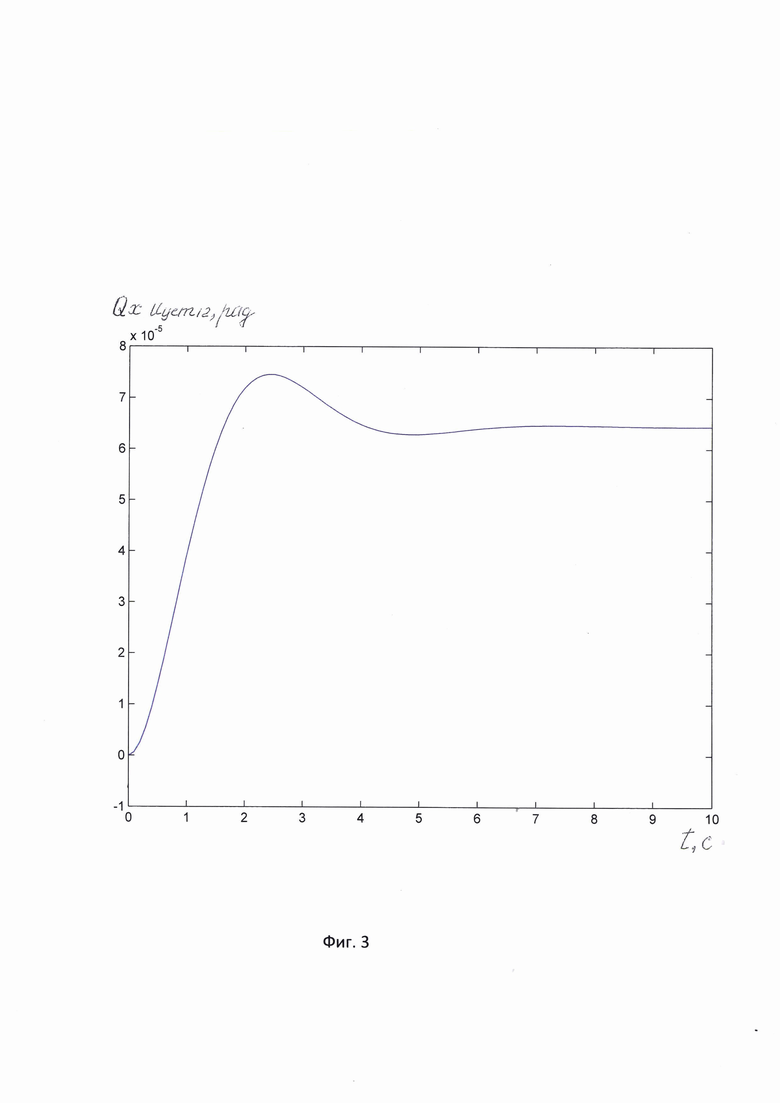
На фиг. 3 показано изменение угла наклона ДНГ-ДУС при подаче на вход интегратора изодромной обратной связи второго канала линейно изменяющегося сигнала уставки Uycт12 = -0,0597t.
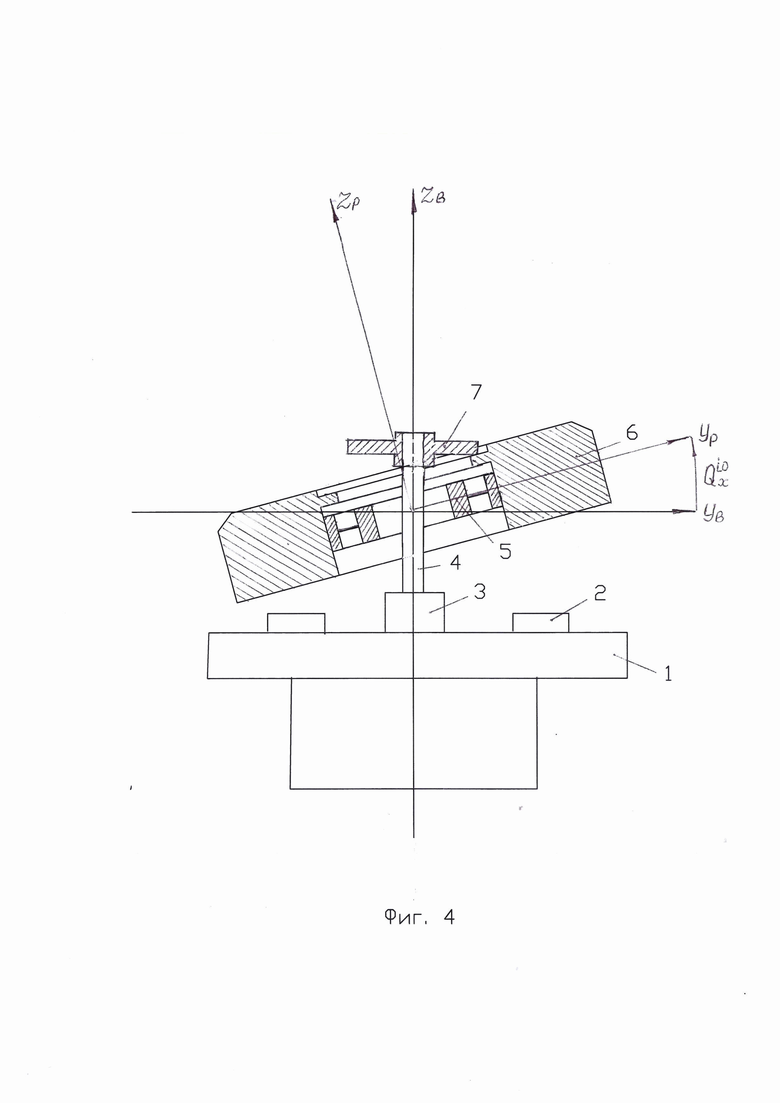
На фиг. 4 представлена конструктивная схема расположения основных узлов динамически настраиваемого гироскопа.
На фиг. 5 показано изменение угла наклона ротора ДНГ-ДУС при воздействии ступенчатого нулевого сигнала датчика угла U02=0,001 В во втором канале и подачи на вход интегратора второго канала изодромной обратной связи сигнала уставки, изменяющегося по линейному закону Uyст12= -0,0597t.
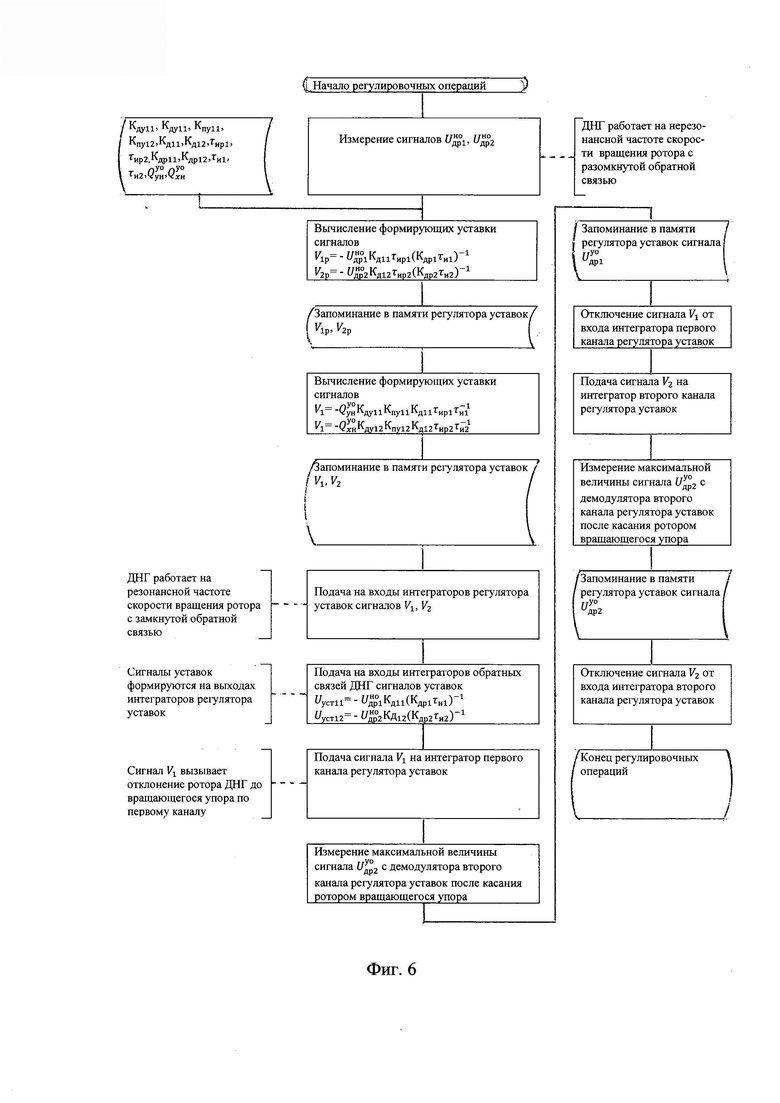
На фиг. 6 представлена блок-схема выполняемых действий при проведении предварительных регулировочных операций в предлагаемом способе регулирования изменения углового положения ротора ДНГ-ДУС, вызванного изменением нулевых сигналов его датчиков углов.
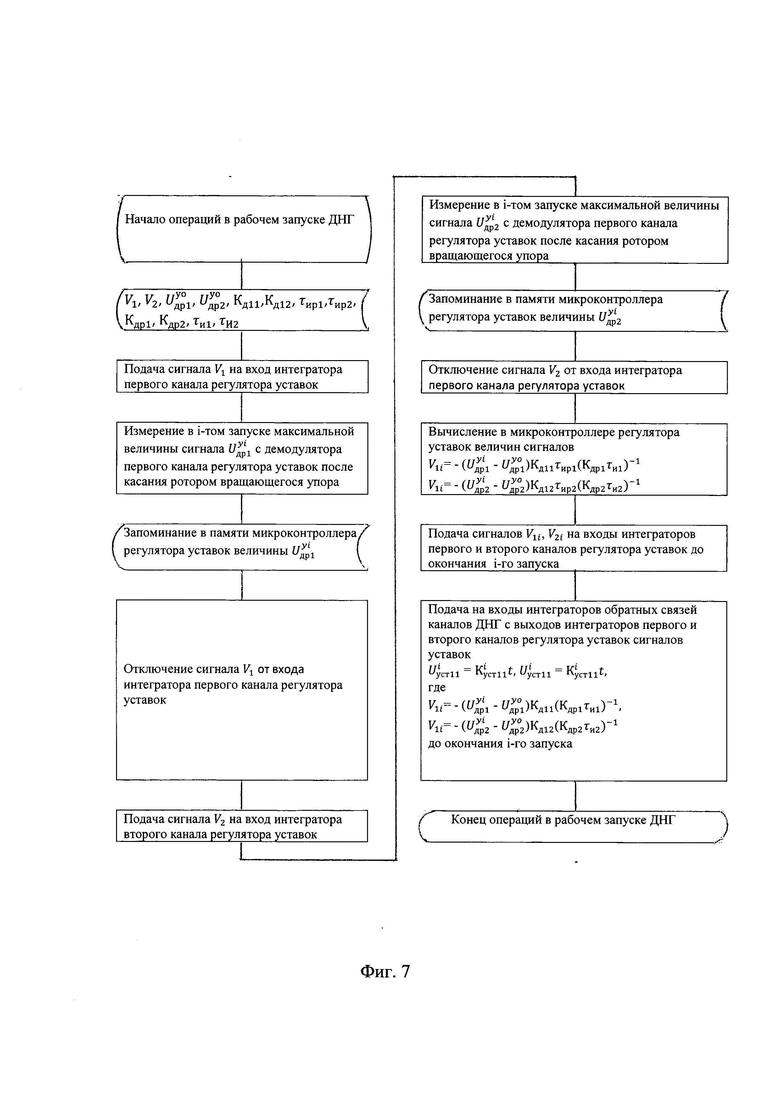
На фиг. 7 показана блок-схема работы регулятора уставки наклона ротора ДНГ-ДУС в рабочих запусках при регулировании изменения углового положения его ротора, вызванного изменением нулевых сигналов датчиков углов.
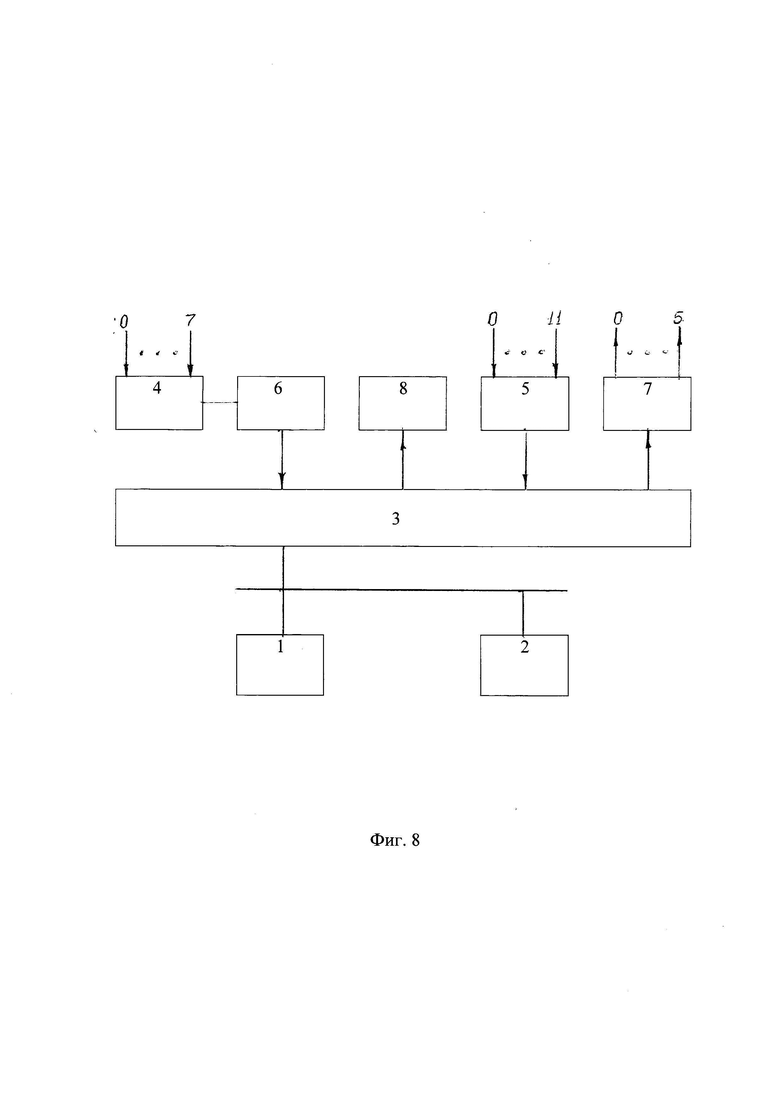
На фиг. 8 приведена схема состава программируемого регулирующего микроконтроллера.
На фиг. 1 представлена функциональная схема датчика угловой скорости на основе динамически настраиваемого гироскопа с регулятором уставки наклона его ротора, в которой показаны основные электронные блоки и их взаимосвязь, позволяющие реализовать предлагаемый способ. Состав электронных блоков, образующих обратные связи по токам датчиков моментов в ДНГ является типичным и имеет практическое использование. В представленной на фиг. 1 функциональной схеме введен новый электронный блок, которым является регулятор 4 уставки наклона ротора гироскопа. Регулятор уставки углового положения ротора ДНГ-ДУС должен реализовывать алгоритмы работы, показанные на фиг. 6 и 7. На фиг. 6 представлена блок-схема выполняемых действий при проведении предварительных регулировочных операций в предлагаемом способе регулирования изменения углового положения ротора ДНГ-ДУС, вызванного изменением нулевых сигналов его датчиков углов. На фиг. 7 показана блок-схема работы регулятора уставки наклона ротора ДНГ-ДУС в рабочих запусках при регулировании изменения углового положения его ротора, вызванного изменением нулевых сигналов датчиков углов. Данный регулятор уставки наклона ротора может быть реализован на основе программируемого управляющего микроконтроллера (ремиконта) и стандартных электронных устройств - демодулятора и интегратора в каждом канале регулирования, таких же, как в каналах обратных связях гироскопа. Схема состава программируемого регулирующего микроконтроллера приведена на фиг. 8. В состав регулирующего микроконтроллера входят: микропроцессор 1, память 2, устройство ввода-вывода 3, фильтры 4, 5, аналого-цифровой преобразователь с мультиплексором 6, цифроаналоговый преобразователь с мультиплексором 7, монитор 8. В микропроцессоре 1 можно выделить совокупность функционально связанных регистров, арифметико-логическое устройство и схемы управления. Арифметико-логические операции могут выполняться над содержимым регистров и ячеек памяти 2. Микропроцессор имеет следующие типы памяти: оперативную, постоянную, внешнюю. Устройство ввода-вывода 3 может иметь параллельный порт ввода-вывода, последовательный порт ввода-вывода. Программируемый порт параллельного ввода-вывода обеспечивает обмен информацией между микропроцессором 1 и внешними устройствами. Последовательный порт ввода-вывода представляет собой универсальный синхронный/асинхронный приемник/передатчик, который принимает от центрального процессора информацию в параллельном виде по шине данных и преобразует ее в поток данных для передачи в последовательном формате. Одновременно это устройство может принимать потоки данных в последовательном и преобразовывать их в параллельный формат. При этом устройство последовательного ввода-вывода извещает процессор о готовности принять новый байт данных для передачи или о приеме байта для процессора. Аналого-цифровой преобразователь 6 преобразовывает аналоговые напряжения в цифровую форму, а цифро-аналоговый преобразователь 7 преобразовывает цифровую форму сигнала в аналоговое напряжение. Входы фильтра 6 являются входами непрерывных сигналов. А входы фильтра 5-входами дискретных сигналов. Для работы с компьютером, программатором используются входы фильтра 5. Микроконтроллер имеет монитор источника питания 8, обеспечивающий надежность работы ремиконта. Таким образом, представленные возможности управляющего микроконтроллера позволяют выполнить действия в предлагаемом способе, которые представлены на фиг. 6 и фиг. 7, и реализовать на его основе регулятор уставки наклона ротора ДНГ, устраняющий наклоны, вызванные изменением нулевых сигналов датчиков углов. Для практической реализации регулятора уставки наклона ротора в ДНГ можно использовать микроконтроллер ADμC812 фирмы Analog Device. Микроконтроллер ADηC812 состоит из четырех основных блоков: блока аналогового ввода-вывода, блока ядра микроконтроллера, блока памяти и блока периферийных устройств. Блок аналогового ввода вывода основан на быстром 12-разрядном АЦП, работающем от одного источника питания и содержит помимо многоканального мультиплексора устройство выборки-хранения, источник опорного напряжения и функцию самокалибровки. Встроенный прецизионный источник опорного напряжения величиной 2,5 В позволяет обходиться без внешних источников при работе с аналоговыми сигналами в диапазоне от 0 до 2,5 В. При большем размахе входных сигналов (от 0 до напряжения питания) возможно подключение внешнего источника опорного напряжения. Максимальная производительность ФЦП составляет 200 тысяч измерений в секунду, что вполне достаточно для применения в предлагаемом способе. Интегральная нелинейность АЦП составляет величину ±0,5 МЗР (младшего значащего разряда). Режим работы АЦП задается микроконтроллером и может быть как "однократным", так и "автоматическим" с прямой записью результатов измерений в память микроконтроллера. На кристалле имеется встроенный датчик температуры, который можно использовать как для независимых измерений температуры окружающей среды, так и в режиме калибровки АЦП. Функции аналогового вывода обеспечиваются двумя 12 разрядными ЦАП, снабженными выходными буферами-усилителями. Каждый ЦАП может работать как в 8-, так и 12-разрядном режиме, и имеет программируемый размах входного напряжения в пределах от 0 до 2,5 В или от 0 до напряжения питания. Блок ядра микроконтроллера основан на полноценной архитектуре контроллеров семейства 8051 и полностью совместим с ними по системе команд. Микроконтроллер работает на тактовой частоте 12 МГц, имеет в своем составе три программируемых 16-разрядных таймера/счетчика, 24 программируемых порта ввода/вывода, 8 программируемых портов ввода и поддерживает систему прерываний от 9 источников с двумя уровнями приоритета. Блок памяти состоит из 8 Кбайт внутренней Flash-памяти для хранения программ, 640 байт внутренней Flash-памяти для хранения данных, 256 байт ОЗУ для хранения данных. При этом адресное пространство данных составляет 16 Мбайт. А адресное пространство программ-64 Кбайт. Для повышения надежности работы ADμC812 на кристалл интегрированы монитор источника питания, уровень срабатывания которого может быть выбран из пяти задаваемых пользователем напряжений в диапазоне от 2,6 В до 4,6 В, и сторожевой таймер с программируемой задержкой сигнала сброса от 16 до 2048 мс. ADμC812 выпускается в 52-вьгводном корпусе, специализирован на температурный диапазон от -40°С до 85°С, и имеет несколько режимов энергопотребления при питании как от 3 В, так и от 5 В источника. Представленные технические характеристики микроконтроллера ADμC812 вполне достаточны для реализации регулятора уставок наклона ротора ДНГ в предлагаемом способе.
Использование предлагаемого способа позволяет повысить точностные характеристики датчиков угловой скорости на основе динамически настраиваемых гироскопов за счет уменьшения погрешностей, связанных с угловой ориентацией ротора относительно вала привода и элементов его корпуса. Углы поворота ротора относительно внутренних элементов конструкции обуславливают погрешности, вызванные моментами демпфирования ротора, моментами торможения ротора при его вращении во внутренней газовой среде герметичного корпуса, вращающими моментами, действующими со стороны вала привода, моментами от остаточной жесткости упругого подвеса, газодинамическими моментами вследствие несимметричных зазоров между поверхностью ротора и внутренними элементами конструкции. Предлагаемый способ позволяет в процессе эксплуатации ДНГ-ДУС сохранять стабильность углового положения ротора относительно его внутренних элементов, тем самым уменьшать погрешности ДНГ от отмеченных вредных моментов. Применение предлагаемого способа повышает точность гироскопических систем на основе ДНГ-ДУС, что обеспечивает расширение области их использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2457493C1 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1995 |
|
RU2098766C1 |
| Датчик угловой скорости на базе динамически настраиваемого гироскопа | 2018 |
|
RU2709028C1 |
| Датчик угловой скорости на базе динамически настраиваемого гироскопа | 2019 |
|
RU2734277C1 |
| Способ компенсации перекрестных погрешностей в измерительных каналах динамически настраиваемого гироскопа | 2022 |
|
RU2806248C2 |
| СПОСОБ АНАЛИТИЧЕСКОГО ГИРОКОМПАСИРОВАНИЯ С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1996 |
|
RU2110767C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
Изобретение относится к области приборостроения, преимущественно гироскопического, и может быть использовано при регулировании изменения углового положения ротора динамически настраиваемого гироскопа (ДНГ), работающего в режиме датчика угловой скорости (ДУС), вызванного изменением нулевых сигналов его датчиков угла. Для устранения статических углов наклона ротора ДНГ, работающего с изодромными обратными связями, по токам датчиков моментов его двух каналов выполняют предварительно подключение к выходам предварительных усилителей датчиков углов входов регулятора уставок наклона ротора гироскопа. Далее выполняют регулировочный запуск гироскопа на резонансной частоте скорости вращения ротора при замкнутых обратных связях и устраняют углы наклона ротора, вызванные ошибками настройки нулевых сигналов датчиков углов. Затем определяют угол поворота ротора от полученного его нулевого углового положения до углового положения при касании ротора вращающегося упора. Для этого отклоняют ротор гироскопа в положительном направлении по входной оси его первого канала от исходного нулевого угла наклона ротора до вращающегося упора, затем данную процедуру повторяют для второго канала. В рабочем режиме при каждом запуске гироскопа, работающего на резонансной частоте скорости вращения ротора с замкнутыми обратными связями по каналам, до времени достижения точностной готовности гироскопа отклоняют ротор сперва по входной оси первого канала от исходного угла наклона ротора по первому каналу в запуске до вращающегося упора, затем выполняют аналогичную операцию для второго канала. После этого обеспечивают нулевое угловое положение ротора ДНГ в запуске при наличии нулевых сигналов его датчиков углов. Технический результат – повышение точности гироскопических систем на основе ДНГ-ДУС. 8 ил.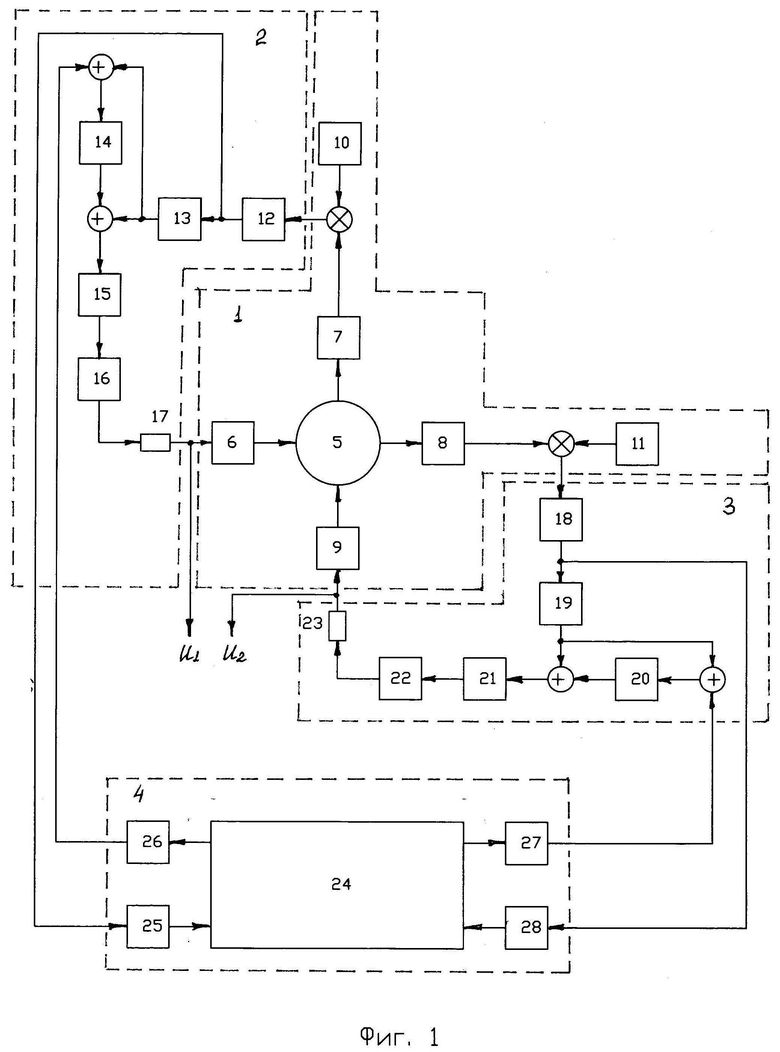
Способ регулирования изменения углового положения ротора динамически настраиваемого гироскопа, работающего в режиме датчика угловой скорости, вызванного изменением нулевых сигналов его датчиков углов, включающий изодромное регулирование по двум аналоговым каналам обратных связей, каждый из которых имеет датчик углового положения ротора, предварительный усилитель датчика угла, демодулятор, интегратор изодромного канала обратной связи, усилитель постоянного тока, усилитель мощности токового сигнала датчика момента, датчик момента, предварительную регулировку нулевых сигналов датчиков углов при нулевых углах отклонения ротора гироскопа от оси вращения приводного вала, выполняемую в режиме разомкнутых обратных связей на нерезонансной частоте вращения ротора, отличающийся тем, что предварительно подключают к выходам предварительных усилителей датчиков углов входы регулятора уставок наклона ротора гироскопа, включающего программируемый регулирующий микроконтроллер, входные демодуляторы и выходные интеграторы, выходы которых подсоединяют к интеграторам изодромной обратной связи гироскопа, и после настройки нулевых сигналов датчиков углов в режиме разомкнутых обратных связей на нерезонансной частоте вращения ротора измеряют в регуляторе уставок достигнутые величины ошибок настроек нулевых сигналов датчиков углов с демодуляторов регулятора уставок  и запоминают их значения в памяти регулирующего микроконтроллера, выполняют регулировочный запуск гироскопа на резонансной частоте скорости вращения ротора при замкнутых обратных связях и устраняют углы наклона ротора, вызванные ошибками настройки нулевых сигналов датчиков углов
и запоминают их значения в памяти регулирующего микроконтроллера, выполняют регулировочный запуск гироскопа на резонансной частоте скорости вращения ротора при замкнутых обратных связях и устраняют углы наклона ротора, вызванные ошибками настройки нулевых сигналов датчиков углов  для чего вычисляют в управляющем микроконтроллере величины формирующих уставки сигналов
для чего вычисляют в управляющем микроконтроллере величины формирующих уставки сигналов

которые подают на входы интеграторов соответственно первого и второго каналов регулятора уставок, и получают на его выходах сигналы уставок

направляемых на входы интеграторов изодромных каналов обратных связей гироскопа, затем определяют угол поворота ротора от полученного его нулевого углового положения до углового положения при касании ротора вращающегося упора, для чего вычисляют в управляющем микроконтроллере величины формирующих уставки сигналов, с помощью которых отклоняют ротор до вращающегося упора,

и запоминают их в памяти регулирующего микроконтроллера, отклоняют ротор гироскопа в положительном направлении по входной оси его первого канала от исходного нулевого угла наклона ротора путем подачи сигнала  с регулирующего микроконтроллера на вход интегратора первого канала регулятора уставок, и после касания ротором вращающегося упора в регуляторе уставок измеряют величину максимального сигнала
с регулирующего микроконтроллера на вход интегратора первого канала регулятора уставок, и после касания ротором вращающегося упора в регуляторе уставок измеряют величину максимального сигнала  с демодулятора первого канала регулятора уставок, и запоминают этот сигнал в памяти микроконтроллера, отключают сигнал
с демодулятора первого канала регулятора уставок, и запоминают этот сигнал в памяти микроконтроллера, отключают сигнал  от входа интегратора первого канала регулятора уставок, отклоняют ротор гироскопа в положительном направлении по входной оси второго канала от исходного нулевого угла наклона ротора, для чего подают сигнал
от входа интегратора первого канала регулятора уставок, отклоняют ротор гироскопа в положительном направлении по входной оси второго канала от исходного нулевого угла наклона ротора, для чего подают сигнал  с регулирующего микроконтроллера на вход интегратора второго канала регулятора уставок и после момента касания ротором вращающегося упора в регуляторе уставок измеряют сигнал
с регулирующего микроконтроллера на вход интегратора второго канала регулятора уставок и после момента касания ротором вращающегося упора в регуляторе уставок измеряют сигнал  с демодулятора второго канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал
с демодулятора второго канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал  от входа интегратора регулятора уставок второго канала, а в рабочем режиме при каждом i-том запуске гироскопа, работающего на резонансной частоте скорости вращения ротора с замкнутыми обратными связями по каналам, определяют изменение между угловым положением ротора при рабочем нулевом сигнале с датчиков углов и угловым положением ротора при его касании вращающегося упора, для этого до времени достижения точностной готовности гироскопа отклоняют ротор сперва по входной оси первого канала от исходного угла наклона ротора
от входа интегратора регулятора уставок второго канала, а в рабочем режиме при каждом i-том запуске гироскопа, работающего на резонансной частоте скорости вращения ротора с замкнутыми обратными связями по каналам, определяют изменение между угловым положением ротора при рабочем нулевом сигнале с датчиков углов и угловым положением ротора при его касании вращающегося упора, для этого до времени достижения точностной готовности гироскопа отклоняют ротор сперва по входной оси первого канала от исходного угла наклона ротора  , для этого подают сигнал
, для этого подают сигнал  с регулирующего микроконтроллера на вход интегратора первого канала регулятора уставок и после момента касания ротором вращающегося упора в регуляторе уставок измеряют величину максимального сигнала
с регулирующего микроконтроллера на вход интегратора первого канала регулятора уставок и после момента касания ротором вращающегося упора в регуляторе уставок измеряют величину максимального сигнала  с демодулятора первого канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал
с демодулятора первого канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал  от входа интегратора первого канала регулятора уставок, отклоняют ротор гироскопа в положительном направлении по входной оси второго канала от исходного угла
от входа интегратора первого канала регулятора уставок, отклоняют ротор гироскопа в положительном направлении по входной оси второго канала от исходного угла  для чего подают сигнал
для чего подают сигнал  с регулирующего микроконтроллера на вход интегратора второго канала регулятора уставок и после момента касания ротором вращающегося упора измеряют в регуляторе уставок сигнал
с регулирующего микроконтроллера на вход интегратора второго канала регулятора уставок и после момента касания ротором вращающегося упора измеряют в регуляторе уставок сигнал  с демодулятора второго канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал
с демодулятора второго канала регулятора уставок, запоминают этот сигнал в памяти микроконтроллера, отключают сигнал  от входа интегратора регулятора уставок второго канала, после этого обеспечивают нулевое угловое положение ротора динамически настраиваемого гироскопа в i-том запуске при наличии нулевых сигналов его датчиков углов, для чего вычисляют в микроконтроллере формирующие уставки сигналы
от входа интегратора регулятора уставок второго канала, после этого обеспечивают нулевое угловое положение ротора динамически настраиваемого гироскопа в i-том запуске при наличии нулевых сигналов его датчиков углов, для чего вычисляют в микроконтроллере формирующие уставки сигналы

которые подают на входы интеграторов первого и второго каналов регулятора уставок до окончания i-гo запуска, и получают на входах интеграторов изодромных каналов обратных связей гироскопа сигналы уставок, устанавливающие ротор в нулевое угловое положение, в следующем виде

где

Кд11, Кд12 - коэффициенты усиления демодуляторов по первому и второму каналам обратных связей гироскопа;
Кдр11, Кдр12 _ коэффициенты усиления демодуляторов регулятора уставок по первому и второму каналам:
Кду11, Кду12 - масштабные коэффициенты датчиков углов гироскопа по первому и второму каналам;
Kпу11, Кпу12 - коэффициенты усиления предварительных усилителей датчиков углов по первому и второму каналам гироскопа;
 - максимальные величины по конструкторской документации углов наклона ротора до вращающегося упора по его осям;
- максимальные величины по конструкторской документации углов наклона ротора до вращающегося упора по его осям;
τи1, τи2 - постоянные времени интеграторов первого и второго изодромных каналов обратных связей гироскопа;
τир1, τир2 - постоянные времени интеграторов регулятора уставок по первому и второму каналам.
| Датчик угловой скорости на базе динамически настраиваемого гироскопа | 2019 |
|
RU2734277C1 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2001 |
|
RU2194948C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕКРЕСТНЫХ ЖЕСТКОСТИ И ДЕМПФИРОВАНИЯ ПОДВЕСА МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП, В КОТОРОМ РЕАЛИЗОВАН ДАННЫЙ СПОСОБ | 2007 |
|
RU2346239C1 |
| US 8005635 B2, 23.08.2011. | |||

