Известны способы управления инерционным объектом при ограниченном управляющем сиг1нале, основанные на введении в закон управления производных сигнала ошибки, а также на определенной последовательности изменений полярности управляющего сигнала U.
Предложенный способ отличается от известных тем, что сравнивают знаки сигнала ошибки и ее производной, а также абсолютную величину текущего значения производной с абсолютной величиной ее допустимого значения и при совпадении знаков сигнала ошибки и ее производной и одновременном превышении производной ее допустимого значения подают на вход объекта параллельно основному сигналу управления дополнительный форсирующий сигнал. Величину форсирующего сигнала поддерживают постоянной независимо от дальнейшего изменения производной, а отключают его при снижении абсолютной величины ошибки рассогласования до заранее установленного значения.
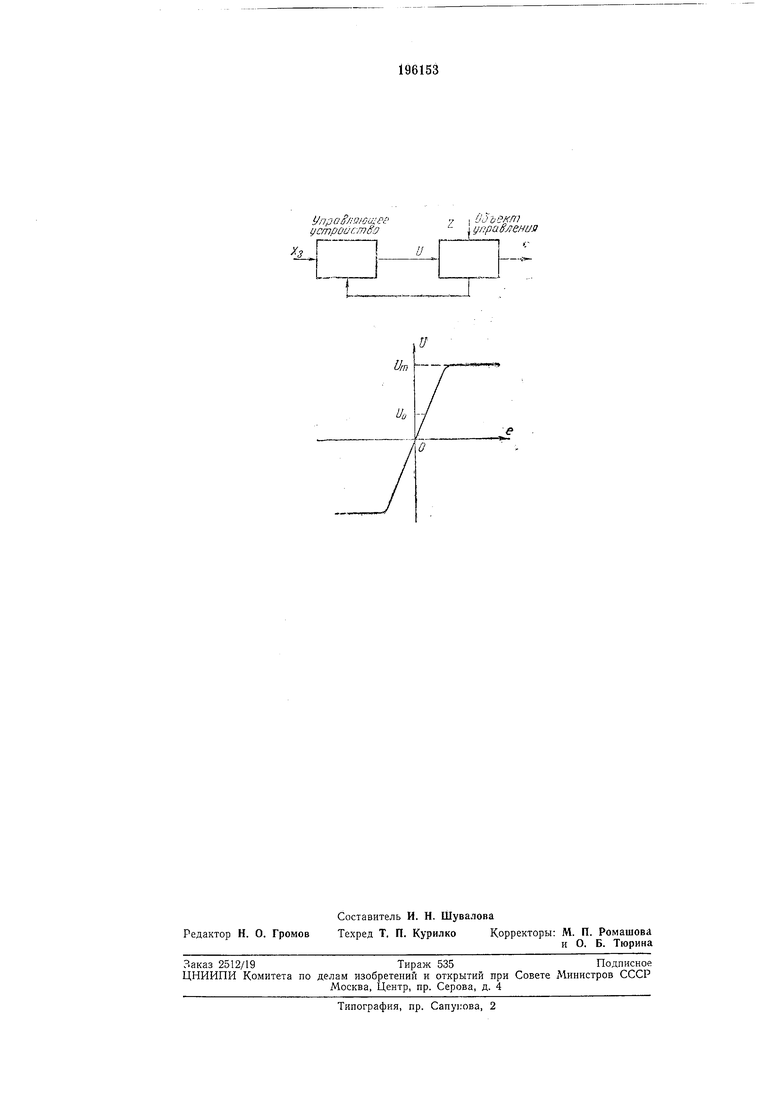
Предлагаемый способ поясняется чертежом.
В реальных системах управления как задающее Хз , гак и возмущающее Z воздействия в основных режимах работы имеют достаточно плавный характер и только в отдельные сравнительно редкие моменты изменяются с относительной большой скоростью на ограниченном интервале времени. В связи с этим в управляющем устройстве предусмотрены два независимых канала: основной,
функционирующий при нормальном протекании процесса, и дополнительный, по которому в опасные (в смысле возможности появления больших динамических ошибок) моменты времени будет поступать дополнительный
форсирующий сигнал. Такое разделение каналов повышает надежность системы, так как п случае выхода нз строя более сложного канала дополнительной форсировки система сохранит работоспособность по основному каналу, хотя и с большими динамическими ошибками.
Чтобы не допустить появления больших динамических ошибок, управляющее устройство должно выполнять две взаимосвязанные функции;
а)прогнозировать поведение системы с целью возможно раннего выявления опасных моментов;
б)обеспечивать необходимую последовательность включения и выключения дополнительного форсирующего сигнала вф , подаваемого на вход исполнительного органа (например, усилителя мощности) и переводящего его в режим насыщения, что создает макснмально возможац орсирование переходного процесса в сис-теж
г-г
При этом запас форси |ф и, определяемый по перёДат:ОЧной Л 1ктёрйстике исполнительного oprajj iBi eTHOufeHHe максимального значения ,„ aipЛДЛя|oщeгp воздействия к его наибольшему значению Ид в установившемся режиме, обычно ограничивается энергетическими соображениями.
В случае управления объектами, характеризующимися требованием минимальной динамической (мгновенной) ошибки, при ограниченных ресурсах управления (насьщении исполнительного органа), простое введение дополнительных сигналов по производным от ошибки (а также и от задаюш,его или возмущающего воздействия) не дает желаемого эффекта, так как дополнительный форсирующий сигнал в виде кратковременного импульса большой высоты «срезан и практически не оказывает влияния на переходный процесс в системе.
По предлагаемому способу включение дополнительного форсирующего ситала соответствующего знака происходит в момент, когда при совпадении знаков ощибки s и
ds
(что свидескорости ее изменения е
dt
тельствует о нарастании, а не убывании 1е1)
величина lei превысит такое пороговое допустимое (критическое) значение г., выше которого действие одного основного контура системы оказывается недостаточным (т. е. динамическая ощибка е может превзойти допустимое значение). После этого сигнал s отключается, а бф остается до тех пор, пока абсолютная величина ошибки 1е1 не уменьшится до некоторого достаточно малого значения 8-. После этого е отключается, и система возвращается в нормальный (не форсированный) режим работы по основному контуру.
Величины параметров настройки и 8 подбираются экспериментально при отладке системы управления или при ее моделировании. В качестве первого приближения (исходного для дальнейшей настройки) можно принять а (где а - предельное значение
скорости изменения линейного задающего воздействия Х at), выще которого ощибка системы управления по основному контуру превосходит допустимую. Значение е ограничивается снизу допустимой амплитудои автоколебаний, которые могут иметь место в системе в моменты включения канала дополнительной форсировки при слишком малой величине .
Предмет изобретения
Способ управления инерционным объектом при ограниченном управляющем воздействии, основанный на измерении ощибки рассогласования и ее первой производной, отличающийся тем, что, с целью уменьшения мгновенной динамической ошибки и повышения надежности управления, сравнивают знаки сигнала ошибки и ее производной, а также
абсолютную величину текущего значения производной с абсолютной величиной ее допустимого значения и при совпадении знаков сигнала ощибки и ее производной и одновременном превыщении производной ее допустимого значения подают на вход объекта параллельно основному сигналу управления дополнительный форсирующий сигнал, причем поддерживают величину форсирующего сигнала постоянной независимо от дальнейщего
изменения производной и отключают форсирующий сигиал при снижении абсолютной величины ошибки рассогласования до заранее установленного значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU334551A1 |
| РЕГУЛЯТОР ДЛЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU370584A1 |
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1982 |
|
SU1084729A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО | 1967 |
|
SU196154A1 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1971 |
|
SU320805A1 |
| Устройство для управления инерционным объектом | 1975 |
|
SU519683A1 |
| Способ подачи форсированных расходов воды в участок канала | 1987 |
|
SU1604912A1 |
| СПОСОЬ РЕГУЛИРОВАНИЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ, ОПИСЫВАЕМЫХ ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИЯМИп-ого ПОРЯДКА | 1969 |
|
SU239405A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |