00 4 Ч N9
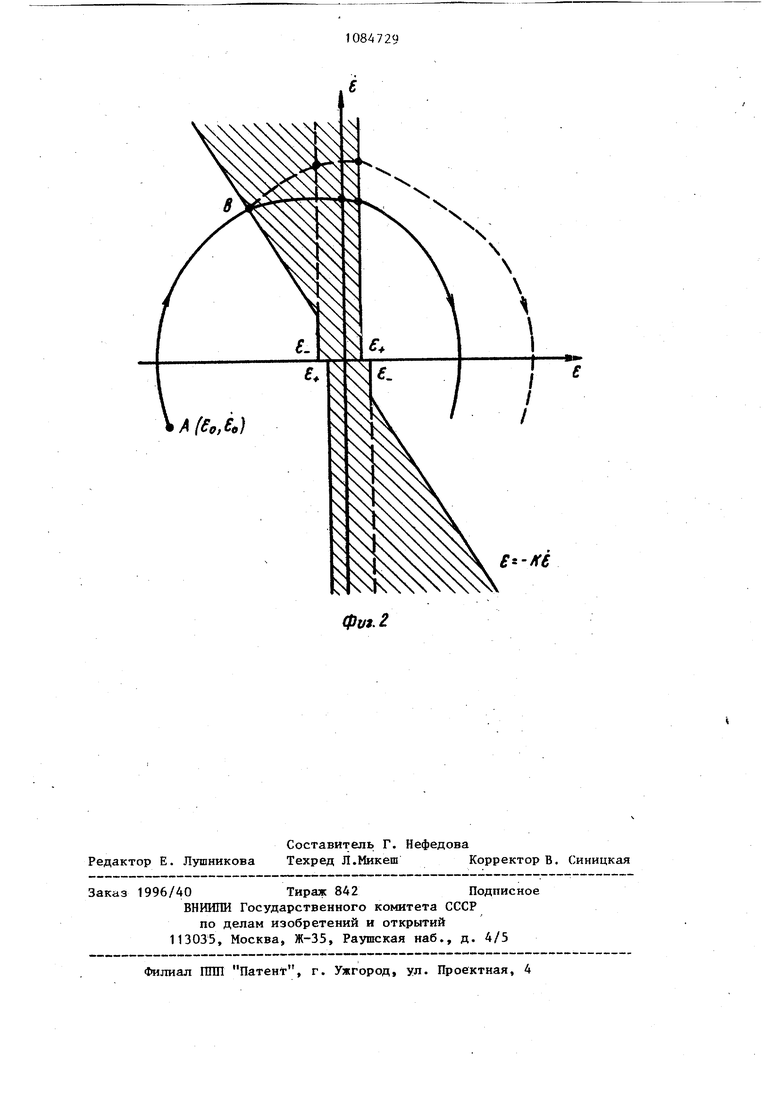
СР 1 ИзобретениеОТНОСИТСЯ к автоматическому управлению и может быть использовано при создании систем управления инерционными объектами при ограниченном управляющем воздействии. Известно устройство, представляю щее собой двухконтурную систему регулирования. В первом контуре этой системы включен трехпозиционный релейный элемент, реагирующий на сумму сигналов, пропорциональных ошибке и ее производной, во втором контуре включен двухпозицион ный релейный элемент без зоны нечувствительности, реагирующий на знак производной ощибки. Во время работы второго контура первый отключается LU Недостатком устройства является существенная колебательность процесса управления во всех режимах ра боты, а также низкое качество регул рования в области малых сигналов ошибки и ее производной. Наиболее близким по технической сущности к предлагаемому является устройство для автоматического упра ления инерционным объектом при ограниченном управляющем воздействии, содержащее основной контур управления, образованньй последовательно соединенными формирователем сигнала ошибки, усилителем-преобраз вателем обладающим насьщ1ением, испо нитепьным органом и объектом управления, выход которого соединен с вт рым входом формирователя сигнала ошибки, и дополнительный контур, об разованный последовательно соединен ными дифференциатором, первым ключом, первым релейным блоком и вторы релейным блоком, выход которого сое динен с вторым входом усилит.еля-пре образователя и вторьм входом первог ключа 2 . Недостатком данного устройства является большое перерегулировани колебательность и время переходного процесса при значительной величине произведенной ошибки в момент выключе ния форсирующего управления, что особенно проявляется для объектов большой инерционности при обработке задакяцих воздействий в виде Ступенчатого сигнала. Цель изобретения - повышение точ ности з равления. 292 Поставленная цель достигается тем, что в устройство введены после- довательно соединенные масштабный блок, компаратор и второй ключ, выход которого соединен со вторым входом второго релейного блока, а втррой вход - с выходом формирователя сигнала ошибки и вторым входом компаратора, причем вход масштабнЬго блока соединен с выходом дифференциатора. На фиг. 1 представлена блок-схема устройства. На фиг. 2 изображен фазовый портрет, поясняющий работу устройства. Устройство содержит формирователь 1 сигнала ошибки, усилительпреобразователь 2, обладающий насьщением, исполнительный орган 3, объект 4 управления,.дифференциатор 5, первый 6 ключ, первый 7 и второй 8 релейные блоки, масштабный блок 9 и компаратор 10, второй ключ 11. Ключи 6 и 11 являются размыкающими. Устройство работает следующим образом. , Пока модуль производной ошибки / S / меньше определенной величины действует только основной (сонтур.При /е/ срабатывает блок 7 и подает на вход блока 8 постоянный по величине сигнал U iV (U - выходной сигнал первого релейного блока), знак которого определяется знаком- . Однако блок В срабатывает только в том случае, если к величине ±V на его входе прибавляется (а не вычитается) совпадающий по знаку сигнал ошибки, превосходящей по арсолютной величине некоторое постоянное значение Е+ (т„е., если выполи ется условие sign sign ). t-- .... При срабатывании блока а с его выхода форсирую1ций сигнал одновременно подается на второй вход усилителя-преобразователя 2, и на второй вход первого ключа 6. Блок 7 отключается, а блок 8 удерживается во включенном состоянии до тех пор, пока ошибка по абсолютной величине не уменьшится до некоторой достаточно малой величины €- , или выполнится равенство -К , вследствие чего с выхода компаратора 10 поступит сигнал на запирающий вход второго ключа 11. При этом блок 8 отключается, форсирующий сигнал на его выходе исчезает и управление осуществляет только основной контур, кроме того, первый запирающий вентил 6 открьшается и схема готова к новому включению форсирующего управления .
Коэффициент К в общем случае может быть задан функцией вида К « К(6,ё) Однако с целью упрощения масштабного бяока 9 целесообразнее принять его постоярным K const. Значения параметров К,Е,., € подбираются экспериментально при настройке системы при ее моделировании
с целью обеспечения требуемьк характеристик устройства.
На фиг. 2 для начальных условий Р, о (точка А) изображен фазовый портрет движения изображающей точки для известного устройства (штриховая линия) и предлагаемого (сплошная линия). Для точки В зти траектории совпадают.
Как видно из фиг. 2, включение дополнительно трех элементов позволит уменьшить амплитуду и число колебаний, а также сократить время переходного процесса.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1985 |
|
SU1273877A2 |
| Система автоматического регулирования | 1981 |
|
SU1029135A1 |
| Нелинейное корректирующее устройство для систем автоматического управления | 1978 |
|
SU752219A1 |
| Регулятор с ограничением управляющего воздействия | 1986 |
|
SU1383287A1 |
| Устройство для управления инерционнымОб'ЕКТОМ | 1979 |
|
SU802924A2 |
| Система стабилизации объекта с присоединенным упругим элементом переменной жесткости | 1988 |
|
SU1603340A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Устройство для компенсации нелинейности объекта типа "люфт | 1983 |
|
SU1108387A1 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ ПРИ ОГРАНИЧЕННОМ УПРАВЛЯЮЩЕМ ВОЗДЕЙСТВИИ, содержащее основной контур 5щравления, образованный последовательно соединенными формирователем сигнала ошибки, усилителем- преобразователем, обладающим насыщением, исполнительным.органом и объектом управления, выход которого соединен с вторым входом формирователя сигнала ошибки, и дополнительный контур, образованный последовательно соединенными дифференциатором, первым ключом, первым релейным блоком и бторым релейным блоком, выход которого соединен с вторым входом уси- . лителя-преобразователя и вторым входом первого ключа, о т л и ч а ющ е е с я тем, 4TOj с целью повышения точности управления, в него введены последовательно соединенные масштабный блок, компаратор и второй ключ, выход которого соединен с втоi (Л рым входом второго-релейного блока, а второй вход - с выходом формирователя сигнала ошибки и вторьм входом компаратора,, причем вход мас штабного блока соединен с выходом дифференциатора.
фиг, f
Фи9.г
N
,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО | 0 |
|
SU196154A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
