Известны автооператоры для перемещения деталей с одной позиции на другую, содержащие захватиый орган, который перемещается по направляющим при помощи гидроцилиидра.
В предлагаемом автооператоре захватиый орган выполнен в виде двух раздвижных планок с гнездами для захвата деталей. Каждая планка концами шарнирпо соединена с одной из двух зубчатых реек. Рейки связаны между собой посредством шестерни, смоятирозапной на ползуне. Последний перемещается по направляющим. Верхняя рейка снабжена стержнем с установленными на нем упорами, между которыми расположен упор, укреплениый на кр01.;щтейие нижней зубчатой рейки, связанной со штоком гидроцилиндра.
Такая конструкция автооператора проще, и, кроме того, работа его более эффективна.
В ползуне предусмотрены пазы, а на направляющих установлены шариковый фиксатор и ограничители хода ползуна. Это позволяет фиксировать его в крайних положениях.
Упоры верхней зубчатой рейки целесообразно выполнять передвижными для переналадки азтооператора на захват деталей других размеров.
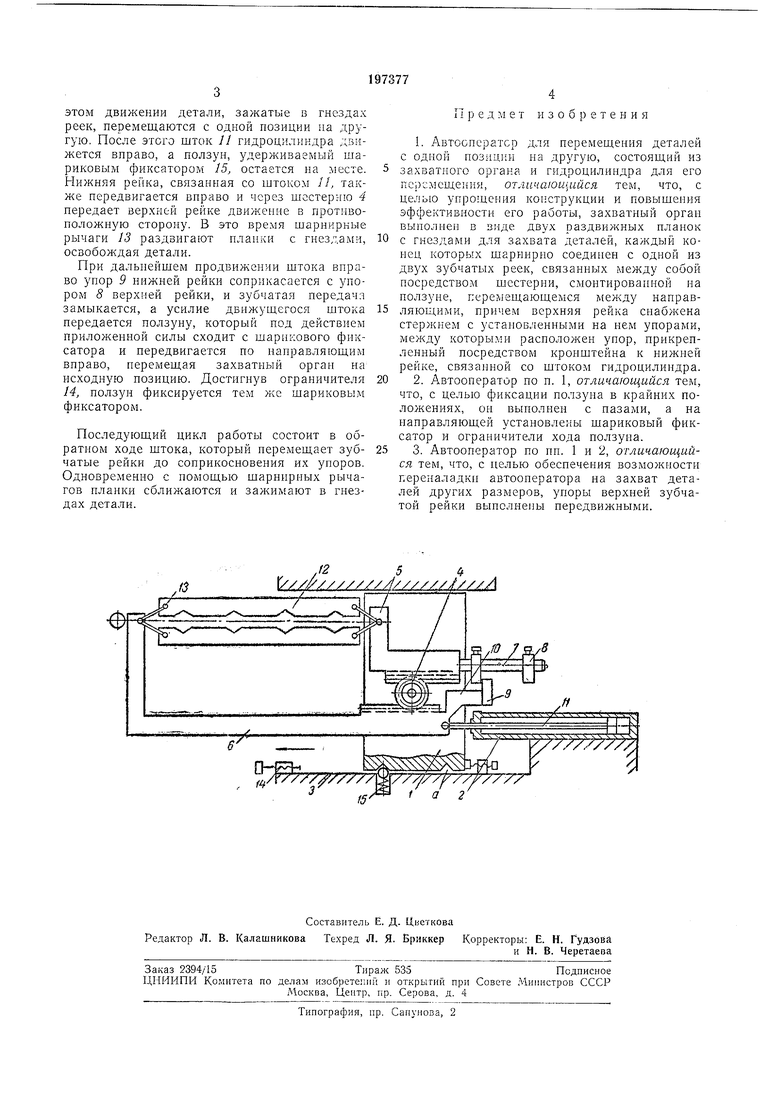
Ползун 7 с помощью гидроцилиндра 2 перемещается по направляющим 3. Па ползуне смонтирована шестерня 4, которая связывает между собой верхнюю зубчатую рейку 5 и нижнюю зубчатую рейку 6. Верхняя рейка нмеет стержень 7 с двумя упорами 8, а на нижней предусмотрен упор 9, смонтированный ма кронштейне 10. Па нижней рейке, кроме тсго, укреплен шток // гидроцилиндра.
Захватный орган представляет собой две раздвижные планки 12 с гнездами. Концы нланок с помощью рычагоз 13 еоедине11Ы с верхней и нижней зубчатыми рег1камн.
Па направляющих смонтированы два ограничителя хода М ползуна и шариковый фиксатор 15. Для фиксации ползуна в крайних положениях сделаны пазы а.
Движение ползуна и зажим деталей автооператором осуществляются от одного и того же гидроцилиндра 2.
Автооператор работает следующим образом.
При движении щтока гидроцилнндра 2 влево (по чертежу) упор 9 нижней зубчатой рейки доходит до упора 8 верхней зубчатой рейки, ползун при этом сходит с шарикового фиксатора J5 и перемещается также влево до ограничителя J4, а фиксатор 15 входит в следующий паз ползуна и фиксирует его. При
этом движении детали, зажатые в гнездах реек, перемещаются с одной позиции на другую. После этого шток // гидроцилиндра движется вправо, а ползун, удерживаемый шариковым фиксатором 15, остается на месте. Нижняя рейка, связанная со штоком //, также передвигается вправо и через шестерню 4 передает верхней рейке движение в противоположную сторону. В это время шарнирные рычаги 13 раздвигают планки с гнездами, освобождая детали.
При дальнейшем продвижении штока вправо упор 9 нижней рейки соприкасается с упором 8 верхней рейки, и зубчатая передач:) замыкается, а усилие двнжушегося штока передается ползуну, который под действием приложенной силы сходит с шарикового фнксатора и передвигается по направляюшим вправо, перемеш.ая захватный орган на исходную позицию. Достигнув ограничителя 14, ползун фиксируется тем же шариковым фиксатором.
Последующий цикл работы состоит в обратном ходе штока, который перемещает зубчатые рейки до соприкосновения их упоров. Одновременно с помощью шарнирных рычагов нланки сближаются и зажимают в гнездах детали.
пред м е т и 3 о о р е т е н и я
I. Автооиератср для перемещения деталей с одной позиции на другую, состоящий из 5 захватного органа и гидроцилиндра для его перемещения, отличающийся тем, что, с целью упрощения конструкции и повышения эфс})ективности его работы, захватный орган выполнен в знде двух раздвижных планок
0 с гнездами для захвата деталей, каждый конец которых шарпирно соединен с одной из двух зубчатых реек, связанных между собой посредством шестерни, смонтированной на ползуне, перемещаюшемся между наирав5 ляющими, причем верхняя рейка снабжена стержнем с установленными на нем упорами, которымн расположен упор, прикрепленный посредством кронштейна к нижней рейке, связанной со штоком гидроцилиндра.
0 2. Автооператор по п. 1, отличающийся тем, что, с целью фиксации ползуна в крайних положениях, он выполнен е пазами, а на направляющей установлены шариковый фиксатор и ограничители хода ползуна.
5 3. Автоонератор по пи. 1 и 2, отличающийся тем, что, с целью обеспечения возможностн переналадки автоонератора на захват деталей других размеров, упоры верхней зубчатой рейки выполнены передвижными.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для деформирующего протягивания | 1985 |
|
SU1346410A1 |
| Автооператор | 1981 |
|
SU1047653A1 |
| Грейферная подача | 1980 |
|
SU1077684A1 |
| АВТООПЕРАТОР | 1970 |
|
SU283801A1 |
| Устройство для перемещения деталей с одной позиции на другую | 1983 |
|
SU1103988A2 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| ПДТГНТЯО- ..,, jВ. п. Бобров | 1970 |
|
SU275673A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Устройство для сборки | 1991 |
|
SU1757836A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
/25c
//// ////////1/////./А//АЛ
ц/ / /// / / ///Ш//////1 //f . ,5 i а 2
