Автооператоры, несущие в поворотной части захватные органы, известны.
Предлагаемый автооператор отличается от известных тем, что, с целью повышения четкости и надежности работы, устройство фиксации выполнено в виде двух взаимодействуюЩих штырей, один Из которых располол ен в неподвижной части корпуса и предназначен для передачи движения от привода к зах1ватам путем фиксации поворотной части корпуса относительно неподвижной, а другой расположен в поворотной части корпуса и предназначен для фиксации захватов относительно поворотной части.
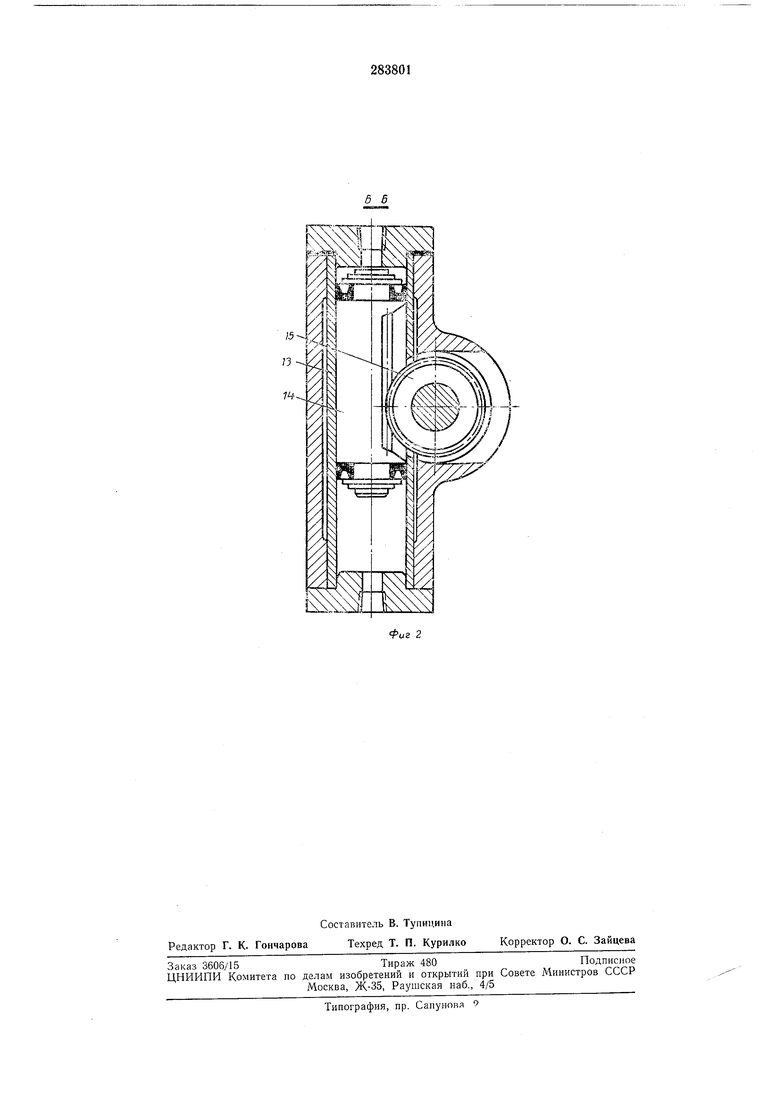
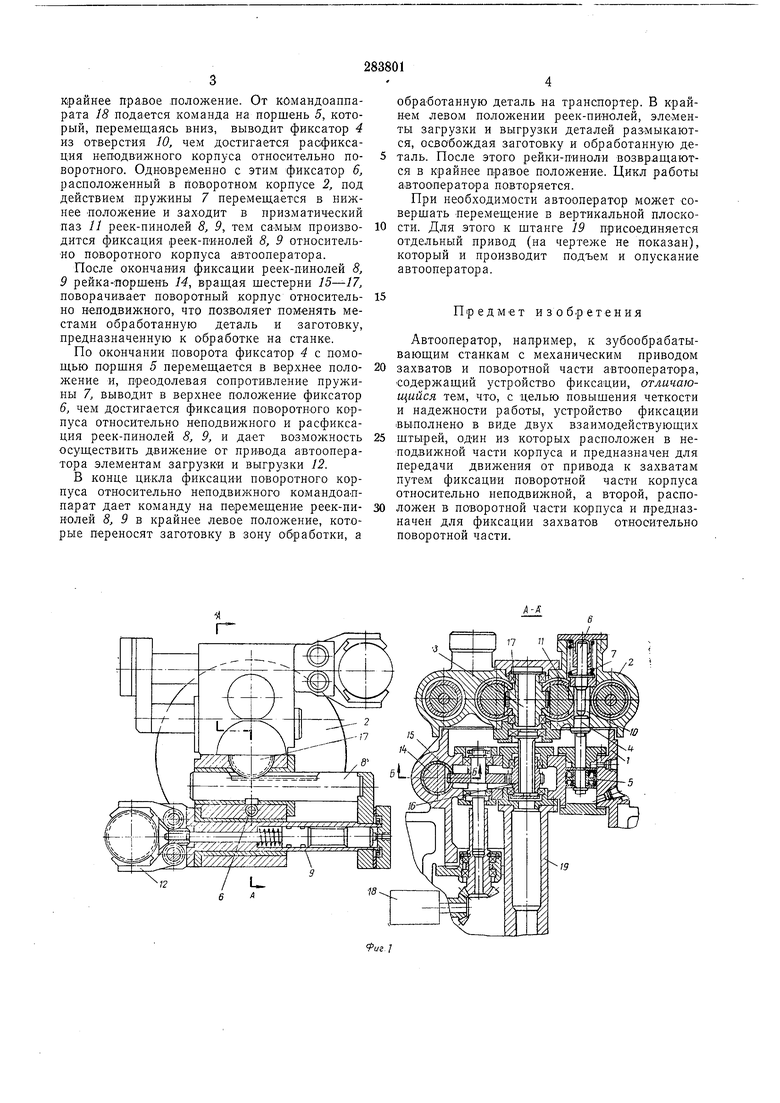
На фиг. 1 схематично изображен автооператор с разрезом по А-А; на фиг. 2 - разрез по Б-Б на фиг. 1.
Автоолератор включает в себя неподвижный / и поворотный 2 корпуса, ось вращения 3 поворотного корпуса, фиксатор 4 с порщнем 5, фиксатор 6 с пружиной 7, рейки-ииноли 8, 9, отверстие 10, расположенное в поворотном корпусе, призматический паз 11, расположенный на рейках-пиполях 8, 9, элементы 12 загрузки и выгрузки деталей, привод автооператора, состоящий из гидроцилиндра 13, рейки-поршня 14 и зубчатых шестерен 15-17, командоаппарат 18 управления приводом (на фиг. 1 показан условно) и подъемную штангу 19 с поршнем гидрощилиндра (на чертеже не показан).
Исходное полол ение автооператора: рейкипиноли 8, 9 выведены в крайнее правое положение, фиксатор 4 под действием поршня 5 введен в отверстие 10 поворотного корпуса 2,
элементы 12 загрузки и выгрузки сведены, фиксатор 6 выведен из призматического паза 11 реек-пинолей 8, 9 и находится в верхнем положении, пружина 7 сжата, чем обеспечивается возможность перемещения реек-пинолей 8, 9, штанга 19 находится в нижнем положении.
Автооператор работает следующим образом.
В исходном положении от командоаппарата
18 подается команда на рейку-поршень 14, которая, перемещаясь под действием гидравлики, передает вращение зубчатым шестерням 15-17. Шестерня 17, находящаяся в зацеплении с рейками-пинолями 8, 9, перемещает их в крайнее левое полол ение. Паряду с этим от отдельного привода раскрываются элементы загрузки и выгрузки деталей. В крайнем левом положении реек-пинолей командоаппарат 18 дает команду элементам
загрузки и выгрузки на захват деталей. Таким образом, одна пара захватов захватывает заготовку на транспортере, а другая - обработанную деталь в зоне обработки. Затем командоаппарат дает команду на
крайнее правое лоложение. От командоаппарата 18 подается команда на поршень 5, который, перемещаясь вниз, выводит фиксатор 4 КЗ отверстия 10, чем достигается расфиксация неподв-ижного корпуса относительно поворотного. Одновременно с этим фиксатор 6, расположенный в Поворотном корпусе 2, под действием пружины 7 перемещается в нижнее Положение и заходит в призматич-еский паз 11 реек-пинол-ей 8, 9, тем самым производится фиксация реек-пинолей 8, 9 относительно поворотного корпуса автооператора.
После окончания фиксации реек-пинолей 8, 9 рейка-поршень 14, враш,ая шестерни 15-17, поворачивает поворотный корпус относительно неподвижного, что позволяет поменять местами обработанную деталь и заготовку, предназначенную к обработке на станке.
По окончании поворота фиксатор 4 с помощью поршня 5 перемещается в верхнее положение и, преодолевая сопротивление пружины 7, выводит в верхнее положение фиксатор 6, чем достигается фиксация поворотного корпуса относительно неподвижного и расфиксация реек-пинолей 8, 9, и дает возможность осуществить движение от привода автооператора элементам загрузки и выгрузки 12.
В конце цикла фиксации поворотного корпуса относительно неподвил ного командоалпарат дает команду на перемещение реек-пинолей S, 5 в крайнее левое положение, которые переносят заготовку в зону обработки, а
обработанную деталь на транспортер. В крайнем левом положении реек-пи«олей, элементы загрузки и выгрузки деталей размыкаются, освобождая заготовку и обработанную деталь. После этого рейки-пиноЛИ возвращаются в крайнее правое положение. Цикл работы автооператора повторяется.
При необходимости автооператор может совершать перемещение в вертнкальной плоскости. Для этого к штанге 19 присоединяется отдельный привод (на чертеже не показан), который и производит подъем и опускание автооператора.
Предмет изобретения
Автооператор, например, к зубообрабатывающим станкам с механическим приводом
захватов и поворотной части автооператора, Содержащий устройство фиксации, отличающийся тем, что, с целью повышения четкости и надежности работы, устройство фиксации выполнено в виде двух взаимодействующих
штырей, один из которых расположен в неподвижной части корпуса и предназначен для передачи движения от привода к захватам путем фиксации поворотной части корпуса относительно неподвижной, а второй, расположен в поворотной части корпуса и предназначен для фиксации захватов
относительно поворотной части.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Устройство для сборки | 1991 |
|
SU1757836A1 |
| Ротор для сверления отверстий | 1988 |
|
SU1668103A1 |
| АВТООПЕРАТОР | 1964 |
|
SU224992A1 |
| Автооператор | 1973 |
|
SU446391A1 |
| Роботизированный технологический комплекс | 1987 |
|
SU1465264A1 |
| УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ЭЛЕКТРОИЗОЛЯЦИОННЫХ И ЗАЩИТНЫХ ПОКРЫТИЙ | 1972 |
|
SU431040A1 |
| СТАНОК ДЛЯ СУПЕРФИНИШНОЙ ОБРАБОТКИ КОЛЕЦ | 1992 |
|
RU2033916C1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1986 |
|
SU1524959A1 |
| Токарный станок | 1988 |
|
SU1683966A1 |