Известен автооператор для автоматической загрузки и разгрузки штучных изделий, содержащий передающий механизм и смонтированньш на нем подающе-захватный орган. Передающий механизм выполнен в виде ползуна, установленного на направляющих, что обеспечивает только один вариант движений подающе-захватного органа.
Предложенный автооператор отличается от известного тем, что его передающий механизм вьшолнен в виде изготовленных в его корпусе двух параллельных замкпутых каналов с перемещающимися Б них с помощью звездочек роликами, причем по два ролика канала связаны между собой лланками с цапфами, на которых смонтирован подающе-захватный орган, а привод звездочек выполпен в виде зубчато-реечной передачи, рейка которой закреплена на ujTOKe порщня нневмоцилиндра, снабженного унорами и конечными выключателями для унравления величиной и направлением перемещений щтока, определяющими закон движения подающе-захватного органа.
Такое выполнение автооператора обеспечивает несколько вариантов движения подающе-захватного органа.
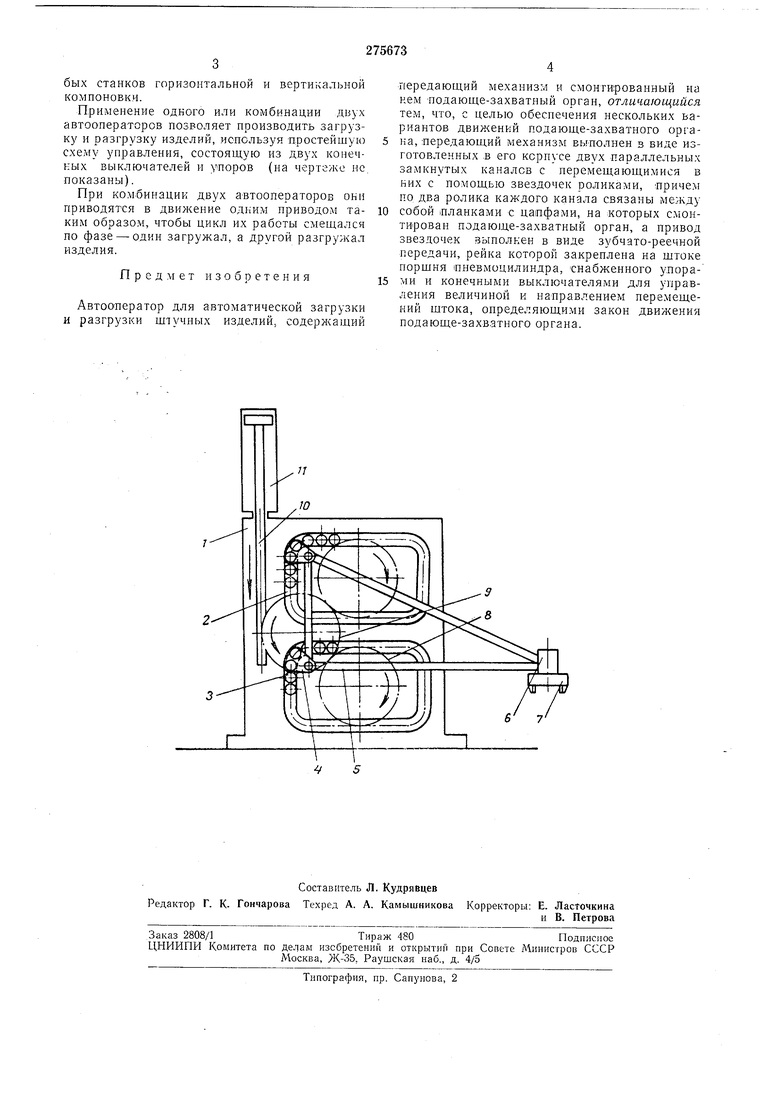
На чертеже схематично изображен описываемый автооператор.
ками 3 (или роликовыми звеньями ненн вплотную друг к другу). По два ролика каждого канала соединены между собой планкой 4 с цапфой, центр которой совпадает с центром радиуса закругления канала.
На нанфах смонтирован нодающе-захватный орган (питатель) 5 с держателем 6 для сменного захвата 7. Ролики 3 перемещаются зацепляющимися с ними звездочками 8, которые приводятся во вращение зубчатой передачей Я посредством рейки 10. Последняя закреплена на щтоке пневмопорщневого привода 11.
Во время работы автооператор осуществляет различные комбинации движений от одного привода // с любых позиций питателя 5, используя весь ход или соответствующую его часть, а также в зависимости от формы замкнутых каналов 2. Например, при прямоугольной форме трассы каналов, автоонератор может совершать следующие шаговые движения: снизу-вверх, на араво-вннз, назад (по замкнутому нрямоугольнику) и обратно.
Благодаря тому, что нитатель 5 связан с цапфамн нланок 4, центр которых совпадает с раднусами закругленнй каналов 2, движение его совершается по координатам в различных направлениях автоматически с выстоямн на закруглениях без команд. Различные комбинации траекторий движения позволяют осущестБлять загрузку и разгрузку практических любых станков горизонтальной и вертикальной комноновки.
П.риыененне одного или комбинации двух автооператоров нозволяет производить загрузку и разгрузку изделий, используя простейшую схему управления, состояш.ую из двух конечных выключателей и упоров (на чертеже не показаны).
При комбинации двух автооператоров они приводятся в движение одним приводом таким образом, чтобы цикл их работы смендался по фазе - один загружал, а другой разгружал изделия.
Предмет изобретения
Автооператор для автоматической загрузки и разгрузки штучных изделий, содержащий
передаюш.ий механизм и смонтированный на нем подаюиде-захватный орган, отличающийся тем, что, с целью обеснечения нескольких вариантов движений подающе-захватного оргака, :передаюш.ий механизм выполпен в виде изготовленных .в его корпусе двух параллельных замкнутых каналов с неремещаюш.имися в них с помош.ыо звездочек роликами, причем по два ролика каждого канала связаны между
собой планками с цапфами, на которых с.монтирован подающе-захватный орган, а привод звездочек выполнен в виде зубчато-реечной передачи, рейка которой закреплена на штоке поршня пневмоцилиндра, снабженного упорами и конечными выключателями для управления величиной и направлением перемещений штока, определяющими закон движения подающе-захватного органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР | 1972 |
|
SU331878A1 |
| АВТООПЕРАТОР ПОВОРОТНЫЙ ДВУХЗАХВАТНЫЙ | 1970 |
|
SU275672A1 |
| Автооператор | 1985 |
|
SU1283035A1 |
| Автооператор | 1981 |
|
SU1047653A1 |
| ВСЕСОЮЗНАЯ ПАТЕНТйО-ТЕХпННЕСКА!!БИБЛИОТЕКА | 1971 |
|
SU306062A1 |
| Устройство для загрузки и разгрузки многошпиндельных токарных полуавтоматов | 1973 |
|
SU512024A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Автооператор | 1986 |
|
SU1379055A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ЗАМЕНЫ КАТУШЕК НАМОТОЧНОГО АППАРАТА | 1972 |
|
SU331835A1 |
| Установка для мойки изделий | 1988 |
|
SU1512688A1 |
