Известны способы электрического торможения асинхронных электродвигателей и получения пониженной скорости нутем подключения статора к преобразовательному агрегату пониженной частоты, причем для полного останова двигатель отключается от электроисточника низкой частоты с применением механического тормоза.
Однако для целого ряда установок и механизмов, например, грузовых клетьевых подъемов, работающих без посадочных кулаков, требующих точного останова на заданной отметке, указанный способ является недостаточно точным из-за колебаний статической нагрузки.
Предложенный способ обеспечивает более точный останов клети на заданной отметке независимо от колебаний статической нагрузки. Это достигается тем, что в момент подачи команды на останов разрывают цепь тормоза и одновременно вводят электросопротивление в цепь возбуждения синхронного электрогенератора, оставляя подключенным к нему двигатель, который отключают только после полного наложения тормоза.
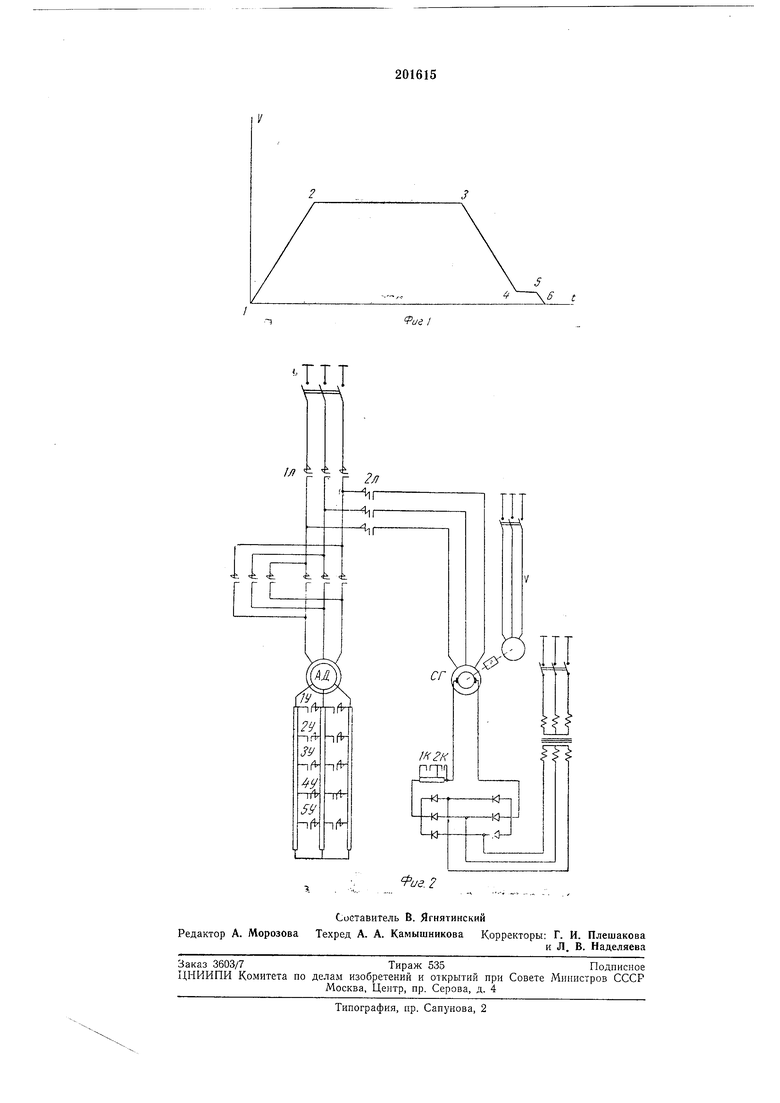
На тахограмме (фиг. 1) приведены все периоды работы электропривода по подъему клети, разгон (точки 1, 2), установившаяся максимальная скорость (точки 2, 3), замедление (точки 3, 4), останов (точки 5, 6}.
Разгон при автоматическом управлении осуществляется как и при ручном, но с дополнительным использованием специального устройства для дистанционного управления гидравлическим тормозом, дающего возможность растормаживать систему без помощи мащиниста.
При подходе клети к точке 3 двигатель АД отключается от электросети частотой 50 гц контактором 1Л (фиг. 2) и подключается к преобразовательному агрегату контактором 2Л. Контакторы ускорения 1У-5У в цепи ротора отключаются в момент переключения контакторов 1Л, 2Л и снова включаются в функции времени, обеспечивая интенсивность и плавность замедления. Замыкаются контакторы 1К, 2К, усиливая возбуждение синхронного генератора СГ. Одновременно, при помощи упомянутого специального гидравлического устройства по управлению гидравлическим тормозом путем отключения первой ступени уменьщается зазор между ободом и тормозными колодками с целью уменьщения разброса времени срабатывания тормоза в период остз нова.
Происходит интенсивное замедление привода и переход на устойчивую пониженную скорость.
При подходе клети к пункту 5 (фиг. 1) подается команда на остановку клети, с целью доставить клеть в строго фиксированный пункт 6.
Способ управления обеспечивает уменьшение влияния колебания статической нагрузки посредством совмещения работы электропривода и тормозной системы в период подхода к месту точной остановки.
Останов происходит в следующей последовательности.
Отключается вторая (последняя) ступень тормоза, одновременно вводится электросопротивление в цепь возбуждения синхронного генератора отключением контактов 1К., 2К (фиг. 2). Двигатель остается подключенным к преобразовательному агрегату до момента полного наложения тормоза, обеспечивая благодаря избыточному моменту двигателя скорость передвижения, практически не зависящую от изменения величины статической нагрузки. В момент полного наложения тормоза обесточивается схема управления и отключается двигатель. Таким образом, отключение
двигателя точно совпадает с моментом полного наложения тормоза.
В этот момент уменьшается электронапряжение на генераторе, благодаря чему происходит плавный, без рывков останов двигателя.
При использовании некоторых типов более совершенных конструкций тормозов отпадает необходимость в торможении двумя ступенями.
Предмет изобретения
1. Способ автоматического останова клетьевой подъемной установки с приводом от асинхронного электродвигателя путем подачи
в цепь статора электронапряжения пониженной частоты, например, от синхронного генератора с последующим наложением механического тормоза, отличающийся тем, что, с целью обеспечения более точного останова
клети на заданной отметке независимо от колебания статической нагрузки, при работе установки без посадочных кулаков, в момент подачи команды на останов, разрывают электрическую цепь тормоза и одновременно вводят электросопротивление в цепь возбуждения генератора, оставляя подключенным к нему двигатель, который отключают от генератора только после полного наложения тормоза.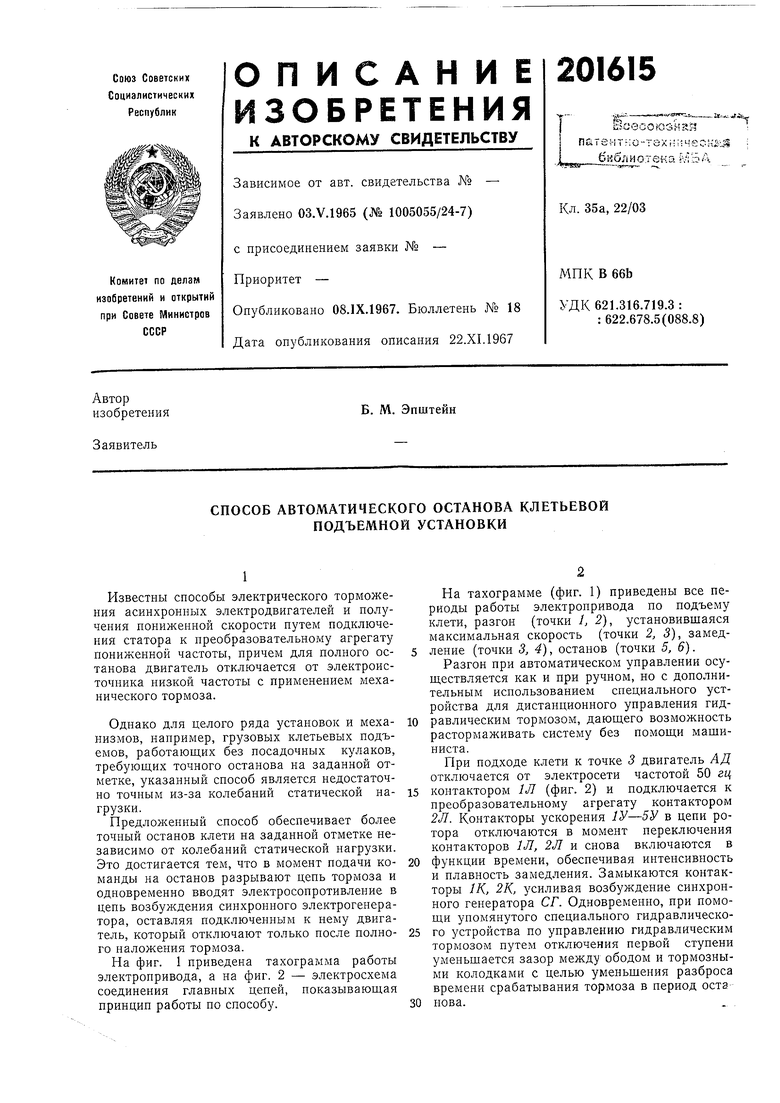
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пуска и останова основовязальной машины | 1954 |
|
SU100777A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПРИВОДОМ ПЕРЕДВИЖЕНИЯ КОКСОВЫТАЛКИВАТЕЛЯ | 1964 |
|
SU166946A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1969 |
|
SU256023A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1967 |
|
SU205920A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗАМЕДЛЕНИЕМ ПРИВОДА ЭСКАЛАТОРА ПРИ ЕГО ОСТАНОВКЕ | 1970 |
|
SU259240A1 |
| Устройство для автоматического управления электроприводом подъемных установок | 1949 |
|
SU87377A2 |
| Устройство для управления электрическим подъемником | 1931 |
|
SU50176A1 |
| УСТРОЙСТВО И СПОСОБ ПОДАЧИ АВАРИЙНОГО ЭЛЕКТРОПИТАНИЯ НА БОРТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2423293C2 |
| Способ демпфирования колебаний синхронного двигателя преобразовательного агрегата | 1989 |
|
SU1624658A2 |