Основное авт. св. № 81470 (заявка № 390230-III) от 18 января 1949 г. было выдано на способ и устройство для автоматического торможения подъемных установок с приводом от асинхронного двигателя и использование тормозного генератора постоянного тока, устанавливаемого на одном валу с асинхронным двигателем.
Настояш,ее изобретение является дальнейшим развитием указанного выше изобретения и предлагается с целью улучшения механических характеристик электропривода и обеспечения возможности применения чисто электрического автоматического управления без перехода в конце режима на механическое торможение.
Известные устройства динамического торможения приводов с асинхронным двигателем имеют ряд особенностей, ограничивающих область их применения.
Эти особенности затрудняют применение динамического торможения для тех вертикальных шахтных подъемов, которые нуждаются в более или менее значительно величине тормозного усилия до момента полного останова. Некоторые подъемные установки нуждаются в тормозном моменте также i в период паузы для удержания подъемных сосудов в неподвижном соотояпии после окончания динамического торможения.
Подъемные установки со скипами, разгружаюш,имися через дно или боковую степку, а также установки с опрокидными скипами и опрокидными клетями, имеюш,ие сложные (четырех-, пятипериодные) тахограммы, нуждаются в более гибкой системе электропривода, позволяюп 1ей легко переходить с двигательного режима на тормозной и обратно.
87377- 2 -
Эти установки требуют тонкой дозировки относительно небольших двигательных и тормозных усилий в периоды продвижения подъемного сосуда по разгрузочным кривым.
Вхождение подъемного сосуда в разгрузочные кривые при четырехи пятипериодной тахогра.мме в большинстве случаев связано с переходом всей системы от тормозного (в третьем периоде) к двигательному режиму с небольшим ,им моментом в четвертом периоде.
Допускаемое ускорение в четвертом периоде в два-три раза меньше, чем в период разгона, а величина груза уменьшается благодаря постепенному опорожнению подъемного сосуда.
Двигатель в этом случае работает с весьма большим скольжением при больших сопротивлениях в роторной цепи.
Такой режим работы неэкономичен и приводит к перенапряжениям в роторе. Чтобы улучшить режим работы и обеспечить тонкую дозировку движущегося усилия, машинисты подъемных машин часто при вхождении подъем1юг( сосуда в разгрузочные кривые включают одновременио двигатель на двигательный режим и подгружают его механическим тормозом. В случае, если желательно осуществить полную автоматизацию подъема при чисто электрической системе управления, участие механического тормоза в четвертом и пятом периоде (продвижение подъемного сосуда по разгрузочным кривым) нежелательно, так как нарушает принцип единого электрического управлеиия и выиуждает считаться со всеми недостатками механического тормоза.
Описываемое устройство управления электропривода с комбинированным электрическим торможением в третьем, четвертом и пятом периодах позволяет улучшить тормозные характеристики электропривода и осуществить любые тахограммы и диаграммы моментов.
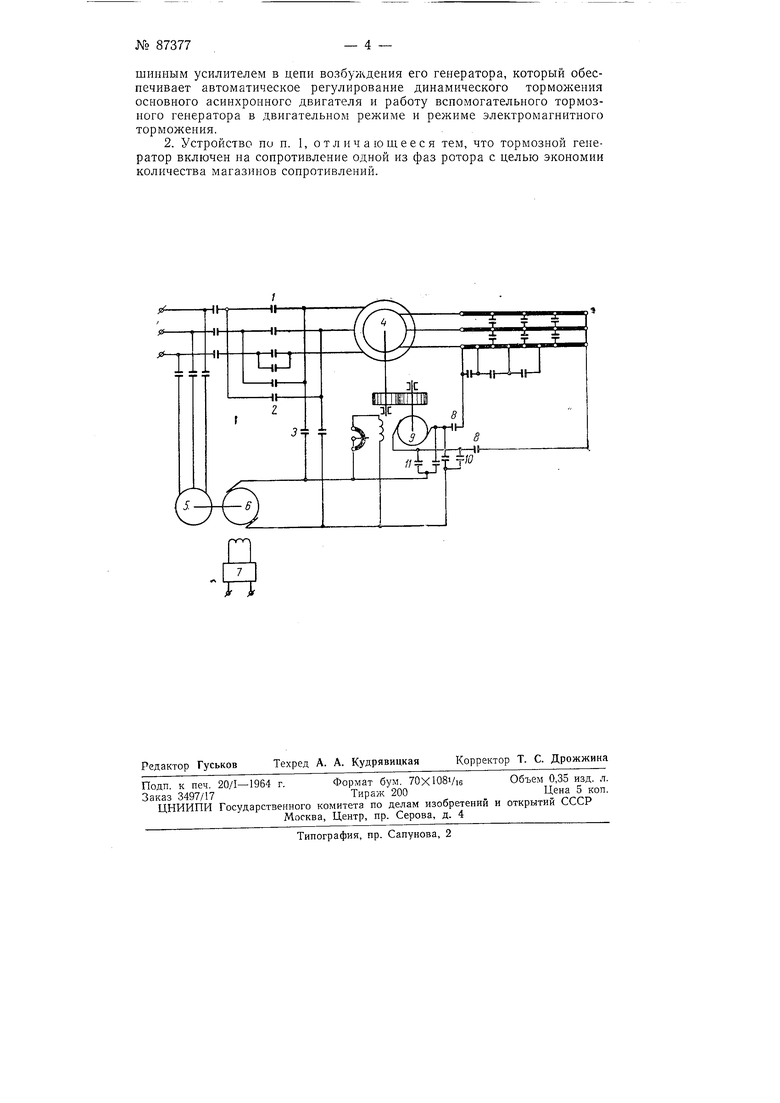
Схема устройства и принцип его действия поясняется чертежом.
В период разгона (первый период по тахограмме) асинхронный двигатель включается по общеизвестным схемам, обеспечиваюшим контакторное управление в цепи рогора при ходе «вперед или «назад.
По окончании разгона во втором периоде (постоянная скорость) двигатель работает в двигательном режиме, а иногда в режиме асшхронного генератора.
В начале третьего периода асинхронный двигатель переходит на режим динамического тормо кения, что осуществляется выключением коитакториых групп 1 и 2 и включением коитакторной группы 3.
Настоящее устройство отличается от общеизвестных тем, что статор асинхронного двигателя 4 питается постоянным током от мотор-генератора 5-6 с независимым возбуждеиием.
Если процесс динамического торможения обеспечивает достаточно точное выполнение заданных диаграмм скорости и пути, то он протекает автоматически при неизменном токе возбуждения генератора 6 и неизменном токе возбуждения асинхронного двигателя 4.
Автматизация хода обеспечивается контакторной автоматикой с помощью реле времени или токовых реле.
В случае отклонения действительного режима от заданного чувствительные элементы, контролирующие точность выполнения заданных диаграмм скорости и пути, воздействуют на цепь управляющей обмотки электромап1инного усилителя 7, питающего обмотку возбуждения генератора 5 динамического тормолсения.
Если форсировка возбуждения генератора 6, в свою очередь форсирующая возбуждение асинхронной машины, не обеспечивает выполнения заданного режима, что может иметь место при малых скоростях, т. е. в конце третьего периода, тогдй соответствующие элементы регуляторной схемы включают контакторы 8 и воздействуют на цепь возбуждения и якорную цепь генератора постоянного тока 9, осуществляющего дополнительное торможение в конце третьего периода.
В случае необходимости генератор 9 может быть включен в самом начале процесса торможения.
В четвертом периоде, асинхроный двигатель включается на двигательный режим, а тормозной генератор постоянного тока продолжает работать в тормозном режиме.
Таким образом обеспечивается плавное регулирование и тонкая дозировка скорости и ускорения в четвертом периоде без участия механического тормоза.
Для получения тормозного момента в пятом периоде (при пятипериодной диаграмме) в случае разгрузки опрокидных сосудов асинхронный двигатель 4 выключается, а генератор постоянного тока 9 включается На противоток через контакторную систему 10. Дозировка тормозного усилия производится с помощью электромашинного усилителя. Мащина постоянного тока может быть включена через контакторы 11 для работы двигателем и обеспечения в период разгрузки тихого хода.
В описываемом устройстве генератор постоянного тока 9 соединен с двигателем 4 через зубчатую передачу таким образом, что больщое зубчатое колесо насажено на вал асинхронного двигателя, а малое зубчатое колесо насажено на вал машины постоянного тока.
Такой способ механического соединения обеспечивает: увеличение тормозного момента при генераторном динамическом торможении на малых скоростях, благодаря тому, что число оборотов генератора оказывается большим, чем число оборотов асинхронного двигателя;
увеличение тормозного момента при противотоке благодаря редукторной передаче; увеличение .движущего момента при работе через контакторы (тихий ход).
Эти обстоятельства позволяют уменьшить мощность генератора постоянного тока 9, который, работая при малых скоростях, может обеспечивать достаточно большие тормозные, а в случае необходимости также и двигательные моменты.
Вторым отлич 1ем в схеме использования генератора постоянного тока 9 является включение якоря этой машины на сопротивление в одной из фаз ротора.
Благодаря этому можно обойтись без специальных сопротивлений в цепи якоря.
Кроме того, создающаяся таким способом несимметрия токов в роторе уменьщает его вращаюншй момент в четвертом периоде.
, Обе эти особенности в применении тормозного генератора совершенно независимы и могут быть применены как совместно, так и каждая в отдельности.
Предмет изобретения
1. Устройство для автоматического управления электроприводом подъемных установок с применением основного асинхронного двигателя и вспомогательного тормозного генератора постоянного тока по авт. св. ЛЬ 81470, отличаюш, ееся тем, что, с целью улучшения механических характеристик электропривода и обеспечения возможности применения чисто электрического автоматического управления (без перехода в конце режима на механическое торможение) при сложны.х тахограммахс тонкой дозировкой тормозного и двигательного моментов, в схеме электропривода предусмотрен мотор-генератор с электрома№ 87377
шинным усилителем в цепи возбуждения его генератора, который обеспечивает автоматическое регулирование динамического торможения основного асинхронного двигателя и работу вспомогательного тормозного генератора в двигательном режиме и режиме электромагнитного торможения.
2. Устройство по н. 1, о т л и ч а ю ш. е е с я тем, что тормозной генератор включен на сопротивление одной из фаз ротора с целью экономии количества магазинов сопротивлений.
| название | год | авторы | номер документа |
|---|---|---|---|
| способ автоматического торможения подъемных установок с приводом от асинхронного двигателя и устройство для осуществления способа | 1949 |
|
SU81470A1 |
| Устройство для автоматического управления электроприводом подъемных установок | 1949 |
|
SU86176A2 |
| АВТОМАТИЗИРОВАННЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1969 |
|
SU257583A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| Электропривод для качающегося конвейера | 1943 |
|
SU63886A1 |
| Электропривод | 1983 |
|
SU1220101A1 |
| ЭЛЕКТРОПРИВОД | 2001 |
|
RU2210853C2 |
| Устройство для автоматического регулирования числа оборотов шахтной подъемной машины | 1939 |
|
SU58922A1 |