Известные электронные модели удара обладают рядом сундественных недостатков; сложны, обладают значительной погрешностью решения.
Данная модель свободна от этих недостатков.
Применение неуправляемого лампового диода в качестве элемента, отключающего систему задания новых начальных условий в момент окончания удара, новысило точность решения модели и нозволило моделировать фазу совместного суш,ествования без каких-лпбо дополнительных усложнений модели.
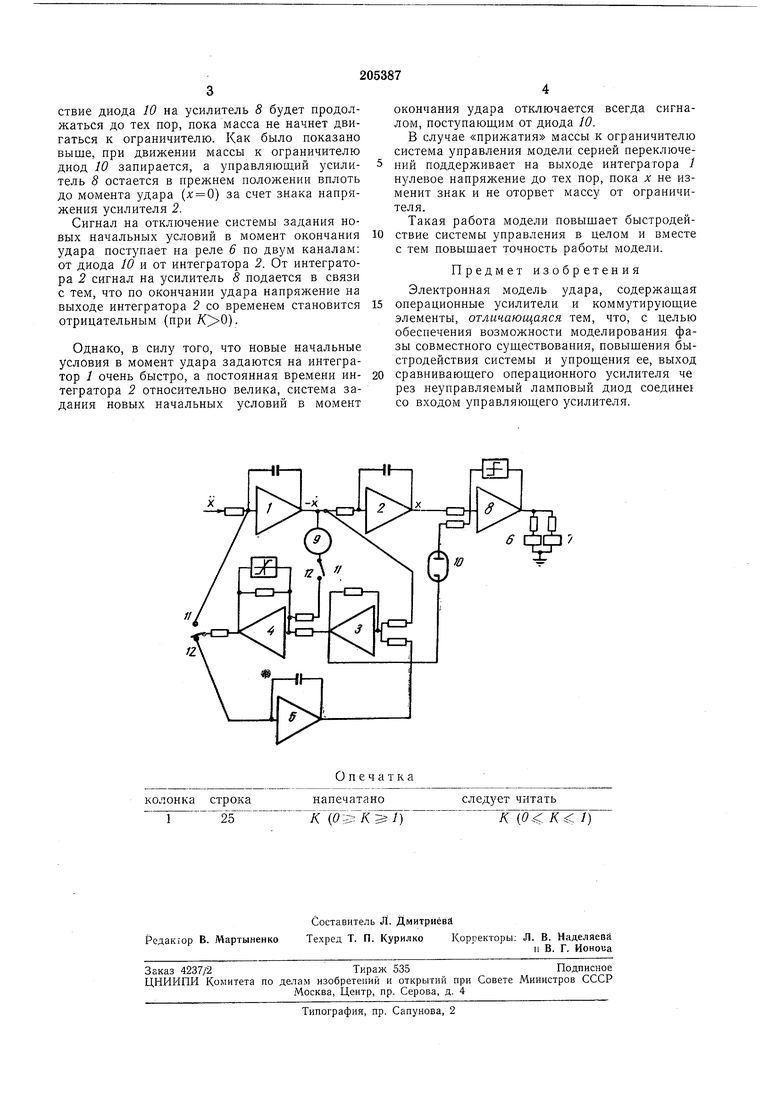
Схема модели приведена на чертеже.
Операционные усилители-интеграторы / и2 решают уравнение движения массы:
тх F,
а усилители - интеграторы 3, 4 и 5 с помош,ью реле 6 и 7, управляемых усилителем S, образуют следяш,ую систему, формирующую новые начальные условия. При этом интегратор 5 дублирует напряжение интегратора 1 с заданным коэффициентом восстановления скорости /( (О 1). Величина коэффициента восстановления скорости устанавливается на детельно, такой же знак имеет напряжение на интеграторе 5. Поэтому при движении массы к ограничителю напряжение на выходе сравнивающего усилителя 3 положительно.
В связи с этим диод W заперт и не оказывает воздействия на управляющий усилительS в момент удара массы об ограничитель.
В момент удара (х, о) на выходе управляющего усилителя 8 напряжение скачком изменяет свой знак, и реле 6 7 замыкают свои контакты 11.
Скоммутированная система задания новых начальных условий быстро задает напряжение Кх(, на интегратор / (где Хо 0-значение скорости массы перед ударом). В течение всего этого времени диод 10 заперт. В момент окончания задания новых начальных условий на выходе сравнивающего усилителя 3 напряжепие становится равным нулю, и диод 10 отпирается. За счет его начального тока на вход управляющего усилителя 8 подается некоторый отрицательный потенциал, переключающий усилитель 8 в положение формирования новых начальных условий (реле и 7 замыкают свои контакты 12}. В связи с этим напряжение на выходе усилителя 3 становится отрицательным и равным - Хо{1-{-К), и диод W фиксирует систему управления в положении формирования новых начальных условий. Действие диода 10 на усилитель 8 будет продолжаться до тех пор, пока масса не начнет двигаться к ограничителю. Как было показано выше, при движении массы к ограничителю диод 10 запирается, а управляющий усилитель 8 остается в прежнем положении вплоть до момента удара (x 0) за счет знака напряжения усилителя 2.
Сигнал на отключение системы задания новых начальных условий в момент окончания удара поступает на реле 6 по двум каналам: от диода 10 и от интегратора 2. От интегратора 2 сигнал на усилитель 8 подается в связи с тем, что по окончании удара напряжение на выходе интегратора 2 со временем становится отрицательным (при/С О).
Однако, в силу того, что новые начальные условия в момент удара задаются на интегратор / очень быстро, а постоянная времени интегратора 2 относительно велика, система задания новых начальных условий в момент
окончания удара отключается всегда сигналом, поступаюп1,им от диода 10.
В случае «прижатия массы к ограничителю система управления модели серией переключений поддерживает на выходе интегратора / нулевое напряжение до тех пор, пока х не изменит знак и не оторвет массу от ограничителя.
Такая работа модели повышает быстродействие системы управления в целом и вместе с тем повышает точность работы модели.
Предмет изобретения
Электронная модель удара, содержащая операционные усилители и коммутируюшие элементы, отличающаяся тем, что, с целью обеспечения возможности моделирования фазы совместного существования, повышения быстродействия системы и упрощения ее, выход сравнивающего операционного усилителя че рез неуправляемый ламповый диод соедине со входом управляющего усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГЕНЕРАТОРА ПОИСКА | 1973 |
|
SU409242A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Электронная модель удара | 1977 |
|
SU658575A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Времязадающее устройство | 1977 |
|
SU682963A1 |
| Модель частотно-импульсного модулятора | 1977 |
|
SU651365A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСПРЕДЕЛЕНИЯ ОСВЕЩЕННОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
SU1625178A3 |
| Система управления регулирующим органом | 1981 |
|
SU1004963A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
Опечатка
колонка строка
напечатано
К (0:s.)
следует читать
К (0 К 1)
