Известны системы централизованного программного управления группой объектов, например группой трикотажных нлосковязальных машин, содержащие блок ввода и счи;тывания программы, устройства для сравнения степени отработки программы со степенью ее считывания, блоки сравнений, линии задержки, датчики номера отрабатываемой программы, блоки памяти, диодные матрицы, усилители мощности и исполнительные механизмы.
Предложенная система отличается от известных тем, что устройства сравнения степени отработки программы со степенью ее считывания, число которых равно числу управляемых объектов, подключены через потенциально импульсные ячейки, которые соединены также с блоками иамяти, к датчикам номера этапа отрабатываемой программы и к общему для всех объектов блоку ввода и циклического считывания в ускоренном масштабе времени программы управления, причем выход каждого устройства сравнения через управляемый от блока ввода блок совпадений и последовательно соединенные линию задержки, блок памяти, диодную матрицу и усилитель мощности подключен к исполнительному механизму рабочего органа машины.
Это позволяет упростить систему при управлении объектами с различными этапами отработки программы.
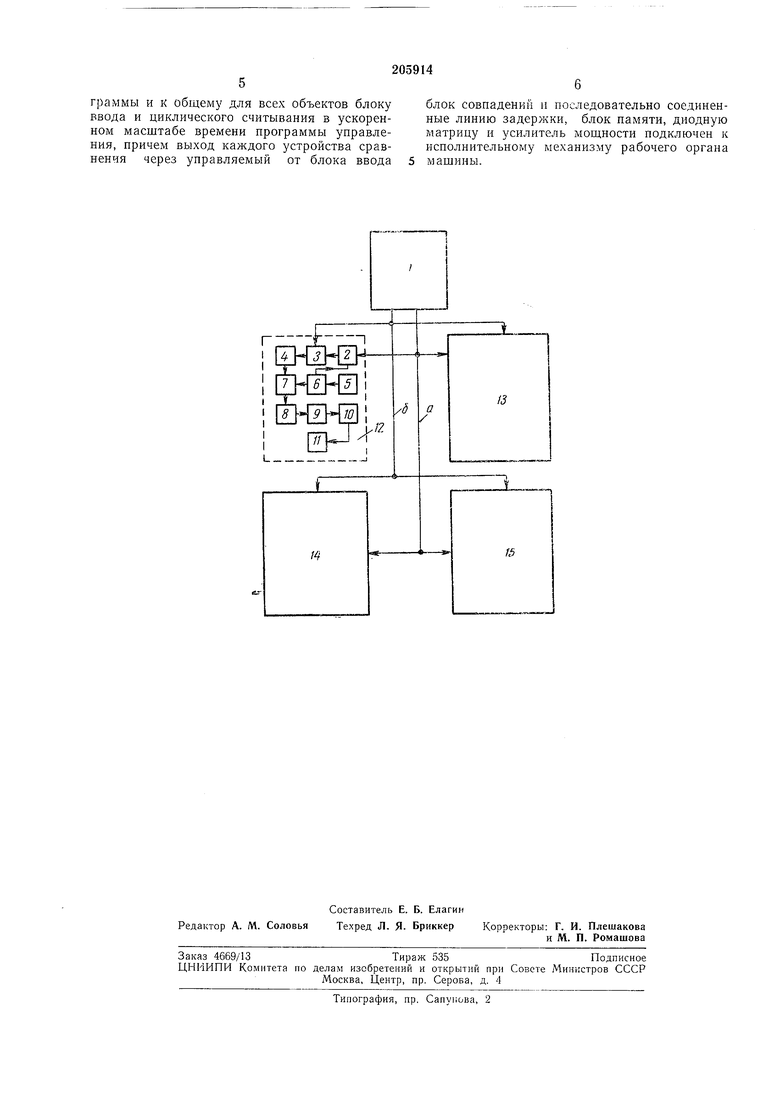
На чертеже приведена элементная схема системы централизованного программного управления.
Централизованная система программного управления группой объектов состоит из конструктивно взаимосвязанных между собой блоков 1 ввода и считывания программы, устройств 2, сравнивающих степень отработки программы со степенью ее считывания, блоков совпадения 3, линий задержки 4, датчиков 5, потенциально импульсных ячеек 6, блоков памяти 7, диодных матриц 8, усилителей мощности 9, электромагнитов 10, перемещающих рабочие органы 11 мащины.
Число одноименных узлов 12, 13, 14 и 15 централизованной системы программного управления зависит от числа управляемых системой объектов.
Устройство узлов 12, 13, 14 и 15 аналогично, поэтому устройство последних будет рассмотрено применительно к управлению одним объектом (кроме общего для всей системы блока 1 ввода и считывания программы). серии ЭТ), В связи с чем подробное описание элементов не приводится. Сам же блок / ввода и считывания программы представляет конструкцию, выполненную, например, в виде электродвигателя, на валу которого укреплен прозрачный диск с нанесенными в определенных местах его поверхности непрозрачных штрихами в соответствии с заданной программой работы объекта в течение всего цикла изготовления изделия. Считывающее устройство блока / может включать каскады фотопреобразователей, выполненных на фотодиоде и одном транзисторе, и узел формирования длительности выходных импульсов. Блок 2, сравнивающий этап отработки программы объектом с этапом считывания программы блоком 1, включает, например, два десятиразрядных счетчика импульсов, построенных на триггерах, на один из которых поступает сигнал со считывающего устройства блока 1, а на второй - сигнал с выхода потенциально импульсной ячейки 6, преобразующей сигнал датчика 5 ходов каретки, и два избирательных блока, каждый из которых выполнен в виде трехступенчатых диодных дешифраторов. Сигнал, соответствующий фактическому числу ходов, появляется на том выходе, номер которого совпадает с данным номером хода каретки, и через формирователь импульсов направляется на соответствующие ему элементы «И (на чертеже не показаны), вторые входы которых подключены к выходам дешифратора счетчика числа импульсов, соответствующим задаваемому номеру хода каретки. В случае появления одновременно сигналов на обоих входах элемента «И (что соответствует равенству отрабатываемого машиной и считываемого номера этапа программы), на выходе последнего появляется сигнал, направляемый на вход блока совпадения 3. Формирователи импульсов могут быть выполнены по схеме одновибратора, элементы «И - на диодах, а в качестве датчика ходов каретки может быть использован бесконтактный конечный выключатель типа КВД-3-24. Работа централизованной системы программного управления группой объектов осуществляется следующим образом. В ускоренном масштабе времени считывающее устройство блока / считывает (например, за 0,17 сек) всю информацию о требуемом положении рабочих органов машины для каждого хода ее каретки и выдает ее одновременно с информацией о номерах ходов каретки, которым соответствует тот или иной вариант включения электромагнитов рабочих органов, по двум каналам: по каналу а - информацию с номера хода, и по каналу б информацию о соответствующем ему варианте включения рабочих органов машины. Еается этап отработки программы данным объектом с этапом считывания программы считывающим устройством блока /. При совпадении этих этапов на выходах блоков 2 появляется сигнал, поступающий на один из входов блоков совпадения 3. Синхронно с этим сигналом на вторые входы данных блоков поступает сигнал о номере варианта включения электромагнитов, соответствующем данному этапу отработки программы. Одновременно с этим сигналы от датчиков 5 ходов каретки через потенциально импульсные ячейки 6 поступают на вход блока памяти 7 и стирают ранее записанную информацию о предыдущем ходе каретки машины, а сигналы с блоков 3 задерживаются в линиях задержки 4, чем исключается одновременное поступление сигналов на входы блоков памяти 7 с блоков 5 и с выходов потенциально импульсных ячеек 6. Сигналы с потенциально импульсных ячеек 6 поступают на общие шины, соединяющие «сбросы всех элементов памяти блоков 7, а сигналы с выходов линий задержки 4 поступают только на один из входов элемента памяти блока 7, запоминаются и соответствующий элемент памяти выдает сигнал на определенную горизонтальную шину соединенной с ним матрицы 8. Сигналы, снимаемые с вертикальных шин этих матриц, усиливаются в усилителях мощности 9 и приводят к срабатыванию требуемых электромагнитов 10, перемещающих рабочие органы 11 в заданные для данной программы положения. Так как за время выполнения одного этапа программы считывается вся информация о работе машины за весь период изготовления изделия, то любой из управляемых объектов, на каком бь этапе отработки программы он не находился, после завершения очередного этапа программы получит необходимую для него информацию о требуемом положении рабочих органов при отработке следующего этапа программы. Предмет изобретения Система централизованного программного управления группой объектов, например группой трикотажных плосковязальных машин, содержащая блок ввода и считывания программы, устройства для сравнения степени отработки программы со степенью ее считывания, блоки сравнений, линии задержки, датчики номера отрабатываемой программы. блоки памяти, диодные матрицы, усилители мощности и исполнительные механизмы, отличающаяся тем, что, с целью упрощения системы при управлении объектами с различными этапами отработки программы, устройства сравнения степени отработки программы со степенью ее считывания, число которых равно числу управляемых объектов, подключены через потенциально импульсные ячейки, которые соединены также с блоками памяти, к
граммы и к общему для всех объектов блоку ввода и циклического считывания в ускоренном масштабе времени программы управления, причем выход каждого устройства сравнения через управляемый от блока ввода
блок совпадении и последовательно соединенные линию задержки, блок памяти, диодную матрицу и усилитель мощности подключен к исполнительному механизму рабочего органа мащины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЦЕНТРАЛИЗОВАННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ ГРУППОЙ ОБЪЕКТОВ | 1967 |
|
SU224636A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ЭЛЕКТРОИСКРОВОЙ УСТАНОВКОЙ | 1966 |
|
SU187502A1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ | 1967 |
|
SU189915A1 |
| Система автоматического регулирования | 1983 |
|
SU1083158A1 |
| Система для централизованного программного управления вентиляторными установками | 1973 |
|
SU460531A1 |
| СПОСОБ ПОЛУЧЕНИЯ ТЕКСТОВОГО ОРИГИНАЛА Д-^Я) ТИПОГРАФСКОГО НАБОРА-—-.-i: | 1971 |
|
SU320397A1 |
| ШАГОВЫЙ ГРАФОПОСТРОИТЕЛЬ | 1970 |
|
SU267216A1 |
| Устройство для обучения операторов | 2016 |
|
RU2615836C1 |
| Устройство для программного управления | 1982 |
|
SU1083159A1 |
| КОНТУРНАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ | 1972 |
|
SU359679A1 |