Изобретение относится к системам автоматического контроля и регулирования.
Известны контурные системы программного управления, содержащие элемент ввода информации, датчик, выполненный в виде ф.ерромагнитного диска и магнитных головок, подключенный непосредственно к выходу элемента ввода информации, а через формирователь импульсов - к его входу и кинематически соединенный с исполнительным двигателем, суммирующий счетчик, элементы «И, «Запрет, «Память, усилители, блоки сброса и стирания, причем блок сброса через блок стирания соединен с датчиком, а через формирователь импульсов - с элементом ввода информации, а также соединен с выходом элемента «И, входы которого подключены к элементам «Память ряда координат Y и X.
Описываемая система программного управления отличается тем, что в ней установлены дополнительный элемент «Запрет, блок скоростей и блок устранения рассогласования скоростей, причем управляющий вход дополнительного элемента «Запрет соединен с выходом элемента ввода информации, а запрещающий вход -с выходом элемента «Память координаты X, выход дополнительного элемента «Запрет через элемент «И соединен с суммирующим счетчиком и через усилитель с одним из входов блока рассогласования скоростей, второй вход которого соединен со входом элемента «Память координаты X и датчиком непосредственно, а третий вход - через блок сброса, выход блока рассогласования скоростей соединен со входом блока скоростей, выход которого подключен к исполнительному двигателю.
Такое выполнение позволило повысить надежность устройства и увеличить скорость
его работы.
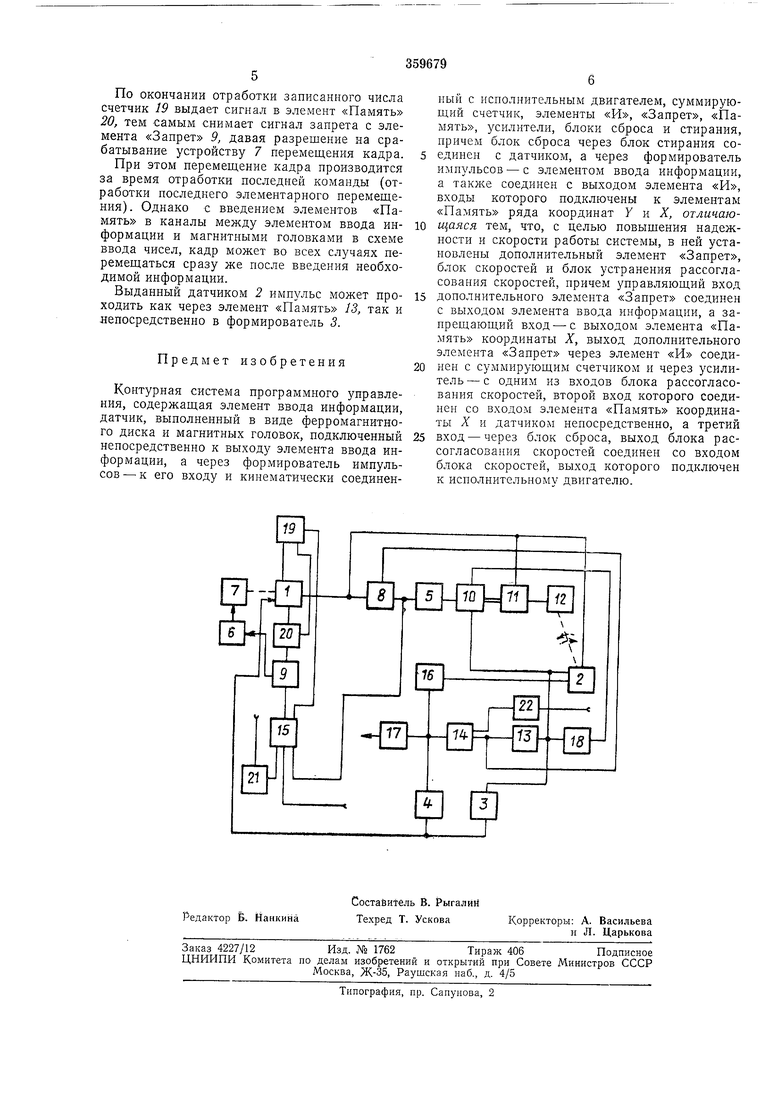
На чертеже приведена блок-схема контурной системы программного управления.
Она содержит элемент / ввода информации, датчик 2, формирователи импульсов 3 и
4, усилители 5 н 6, устройство 7 перемещения кадра, элементы «Запрет 8 и 9, блок 10 устранения рассогласования скоростей, блок скоростей 11, исполнительный двигатель (реверсивный привод) 12, элемент «Память 13
координаты X, элементы «И 14 и 15, блок стирания 16, блоки сброса 17 и 18, суммирующий счетчик 19, элементы «Память 20 и 21, элемент «Память 22 координаты Y. Устройство работает следующим образом.
Элемент 1 ввода информации посылает сигнал в один из проводников тока датчика 2, работающего но принципу совпадения магнитной метки, записанной на периферии ферромагнитного диска датчика с нулевой магвыдающей импульс при вращении ферромагнитного диска в момент совпадения метки. Выданный датчиком 2 импульс формируется в формирователе импульсов 3 до формы и величины, достаточной для четкой метки на ферромагнитном диске датчика 2, и передается в элемент ввода информации, где подготовлен следующий объем информации при исполнении датчиком предыдущего объема информации. Сформированный и усиленный сигнал от элемента 1 ввода информации проходит в проводник тока датчика 2 и наносит на ферромагнитный диск метку, соответствующую объему перемещения данного кадра программы.
Одновременно сигнал с элемента / ввода информации поступает на управляющий вход элемента «Запрет S соответствующей координаты, затем усиливается усилителем 5 и подается в блок W устранения рассогласования скоростей и блок скоростей П, сопротивления которых подключены последовательно. В это время на блоке скоростей II дежурит сигнал, пришедший с элемента I ввода информации и равный величине заданной скорости реверсивного привода 12. Усиленный сигнал, пройдя через соответствующее количество сопротивлений потенциометрического блока скоростей 11, обтекает обмотку реверсивного привода 12 с заданным уровнем напряжения, определяющим скорость двигателя; тем самым осуществляется дифференцирование скорости реверсивного привода 12. Пришедший в действие двигатель приводит во вращение датчик 2, механически с ним связанный, и работает до совпадения нанесенной магнитной метки со считывающей «нулевой магнитной головкой. В момент совпадения метки с «нулевой головкой подается сигнал в элемент «Память 13. Став в рабочее положение, элемент 13 подает сигнал на запрещающий вход элемента «Запрет 8, при этом снимается сигнал с усилителя 5 и соответственно со всей цепочки, питающей реверсивный привод 12. Движение по данной координате прекращается (если новое перемещение по этой координате равно нулю).
Одновременно сигнал с элемента «Память 13 дает разрешение блоку 10 устранения рассогласования скоростей ряда координат на учет величины рассогласования, а значит и подключения соответствующего количества сопротивлений (пропорционально степени перебега данной координаты относительно другой) последовательно сопротивлениям потенциометрического блока скоростей 11. Тем самым снижается напряжение на реверсивном приводе 12 данной координаты, а значит и снижается скорость отработки команды на следующем элементарном участке движения. По окончании отработки следующего элементарного участка сигнал от «нулевой головки датчика 2 поступает в блок сброса 18, который осуществляет отключение сопротивлений блока 10 устранения рассогласования скоростей и переводит элемент «Память 13 в рабочее положение. Сигнал последнего разрешает ввод нового сочетания сопротивлений последовательно блоку скоростей 11, пропорционального величине перебега метки датчика 2.
Тем самым устраняется рассогласование скоростей, определяемое величиной относительного перебега дисков - измерителей между сигналами «нулевых головок узлов, работающих по различным координатам при помощи блока магнитных головок датчика 2.
В момент срабатывания «нулевых магнитных головок двух или ряда координат подаются сигналы в элемент «И 14 посредством, например, элементов «Память 13 и 22 от координат, например, X и У. Сигнал с элемента 14 поступает в блок 16 стирания записи, блок сброса /7 и в формирователь импульсов 4.
Блок стирания записи осуществляет стирание предыдущей записи на датчике 2 с помощью, например, подачи тока высокой частоты в обмотку универсальных головок. Блок
сброса П приводит систему в исходное положение.
Формирователь импульса 4 выдает сигнал для разрешения считывания программы с элемента / ввода информации с некоторой
задержкой, позволяющей привести систему в исходное положение от блока сброса 17.
В момент поступления сигнала на разрешающий вход элемента «Запрет 8 он проходит к элементу «И 15 для смены кадра элемента ввода информации. Вместо сигнала неработающих магнитных головок по другим координатам элемент ввода информации выдает сигнал, дежурящий на элементе «Память 21, предусмотренный при составлении
программы. С помощью этого сигнала открывается элемент «И 15 и через разрешающий вход элемент «Запрет 9 осуществляется смена кадра через усилитель 6 и устройство 7 перемещения кадра.
С целью повышения разрешающей способности системы (точности отработки) путь между опорными точками аппроксимации делится, например, на десять элементарных перемещений и отрабатывается десять отрезков
с устранением рассогласования скоростей на каждом отрезке посредством блока 10 устранения рассогласования скоростей и ряда универсальных считывающих головок, расположенных по обе стороны «нулевой считывающей головки датчика 2.
Программа на количество повторений элементарных отрезков записывается, например, в двоичный суммирующий счетчик 19, работающий от импульсов, поступающих с логического элемента «И 15. В данном случае задается команда с элемента / ввода информации на элемент «Память 20, запрещающий сигнал поступает в элемент «Запрет и смены кадров не происходит, а сигналы с элеПо окончании отработки записанного числа счетчик 19 выдает сигнал в элемент «Память 20, тем самым снимает сигнал запрета с элемента «Запрет 9, давая разрешение на срабатывание устройству 7 перемещения кадра.
При этом перемещение кадра производится за время отработки последней команды (отработки последнего элементарного перемещения) . Однако с введением элементов «Память в каналы между элементом ввода ин- ю формаций и магнитными головками в схеме ввода чисел, кадр может во всех случаях перемещаться сразу же после введения необходимой информации. Выданный датчиком 2 импульс может про- 15 ходить как через элемент «Память 13, так и непосредственно в формирователь 3. Предмет изобретения20 Контурная система программного управления, содержащая элемент ввода информации, датчик, выполненный в виде ферромагнитного диска и магнитных головок, подключенный 25 непосредственно к выходу элемента ввода информации, а через формирователь импульсов - к его входу и кинематически соединенный с исполнительным двигателем, суммирующий счетчик, элементы «И, «Запрет, «Память, усилители, блоки сброса и стирания, причем блок сброса через блок стирания соединен с датчиком, а через формирователь импульсов - с элементом ввода информации, а также соединен с выходом элемента «И, входы которого подключены к элементам «Память ряда координат Y л X, отличающаяся тем, что, с целью повышения надежности и скорости работы системы, в ней установлены дополнительный элемент «Запрет, блок скоростей и блок устранения рассогласования скоростей, причем управляющий вход дополнительного элемента «Запрет соединен с выходом элемента ввода информации, а запрещающий вход - с выходом элемента «Па.мять координаты X, выход дополнительного элемента «Запрет через элемент «И соединен с су.ммирующим счетчиком и через усилитель- с одним из входов блока рассогласования скоростей, второй вход которого соединен со входом элемента «Память координаты X и датчиком непосредственно, а третий вход -через блок сброса, выход блока рассогласования скоростей соединен со входом блока скоростей, выход которого подключен к исполнительному двигателю.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный интерполятор | 1970 |
|
SU457998A1 |
| Устройство программного управления | 1984 |
|
SU1246055A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для программного управления положением объекта | 1987 |
|
SU1520479A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство автоматической стабилизации амплитуды видеосигнала | 1990 |
|
SU1757124A1 |
| Устройство для программного управления электроприводом | 1985 |
|
SU1260919A1 |
| ДАТЧИК ДЛЯ ВВОДА ИНФОРМАЦИИ ПРИ ИЗМЕРЕНИИ УГЛОВЫХ ВЕЛИЧИН | 1970 |
|
SU273687A1 |
| Устройство для программного управления промышленным роботом | 1980 |
|
SU894675A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
