,1
Известны системы автоматического управления координатографом, в которых с помощью блоков текущей и заданной информации и сравнивающих тетрад формируется сигнал торможения.
Предложенное устройство отличается от известных тем, что оно обеспечивает плавный подход отметчика к запрограммированной точке при оптимальном режиме движения исполнительного механизма и плавное изменение момента начала торможения при изменении статизма устройства.
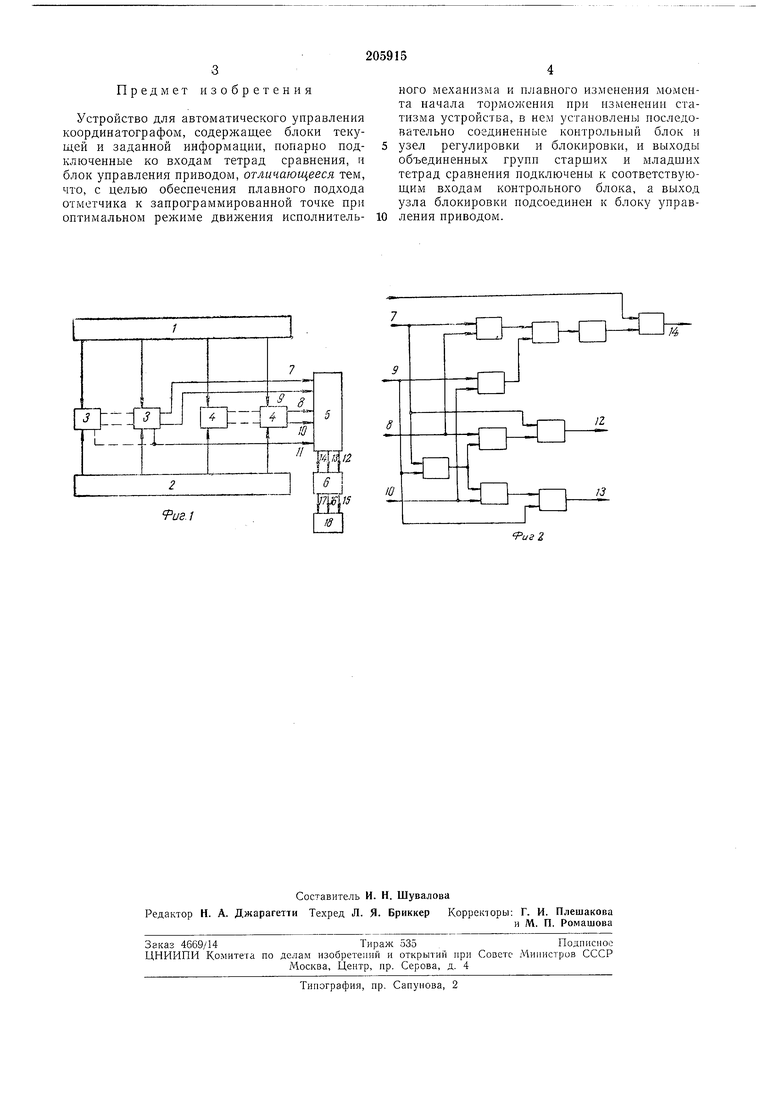
На фиг. 1 приведена блок-схема предлагаемого устройства; на фиг. 2 - функциональная схема контрольного блока.
Устройство содержит блоки текущей J и заданной 2 информации, двоично-десятичные «старщие тетрады 3 сравнения, двоично-десятичные «младщие тетрады 4, контрольный блок 5 и узел 6 регулирования и блокировки.
Устройство работает следующим образом.
Информация о положении исполнительного механизма, выдаваемая блоком 1 текущей информации, и о программе, выдаваемая блоком 2 заданной информации, в виде двоичнодесятичного кода поразрядно поступает на две автономные группы сравнения. В зависимости от соотнощения кодов текущей и заданной информации каждая группа тетрад сравнения выдает результирующие сигналы 7 и 8
(больще) к 9 и 10 (меньще), причем сигнал 7 (или 9) -для группы старших тетрад и сигнал 8 (или 10) -для группы младших тетрад. Сигналы 11 о том, что разница между кодами текущей и заданной информации в «старших тетрадах составляет единицу их наименьшего разряда выдается схемой и ячейками торможения «старших тетрад 3. Из поступающих сигналов 7-11 в контрольном блоке 5, согласно функциональной схеме, образуются сигналы 12 и 13 о направлении движения исполнительного механизма с приоритетом «старших тетрад, а также сигнал 14 о том, что разница между кодами равна или меньше
максимального объема информации «младших тетрад плюс значение самого младшего разряда.
Узел 6 регулирования и блокировки позволяет при наладке оптимально отрегулировать,
а в случае изменения статизма системы - скорректировать момент выдачи сигнала на тсрможение привода.
Наличие узла 6 исключает также возможность включения максимальной скорости при
малых программах и тем самым рысканье отметчика.
Предмет изобретения
Устройство для автоматического уиравлеиия координатографом, содержащее блоки текущей и заданной информации, попарно подключенные ко входам тетрад сравнения, и блок управления приводом, отличающееся тем, что, с целью обеспечения плавного подхода отметчика к запрограммированной точке при оптимальном режиме движения исполнительного механизма и плавного изменения момента начала торможения при изменении статизма устройства, в нем установлены последовательно соединенные контрольный блок и узел регулировки и блокировки, и выходы объединенных групп старших и младших тетрад сравнения подключены к соответствующим входам контрольного блока, а выход узла блокировки подсоединен к блоку управления приводом.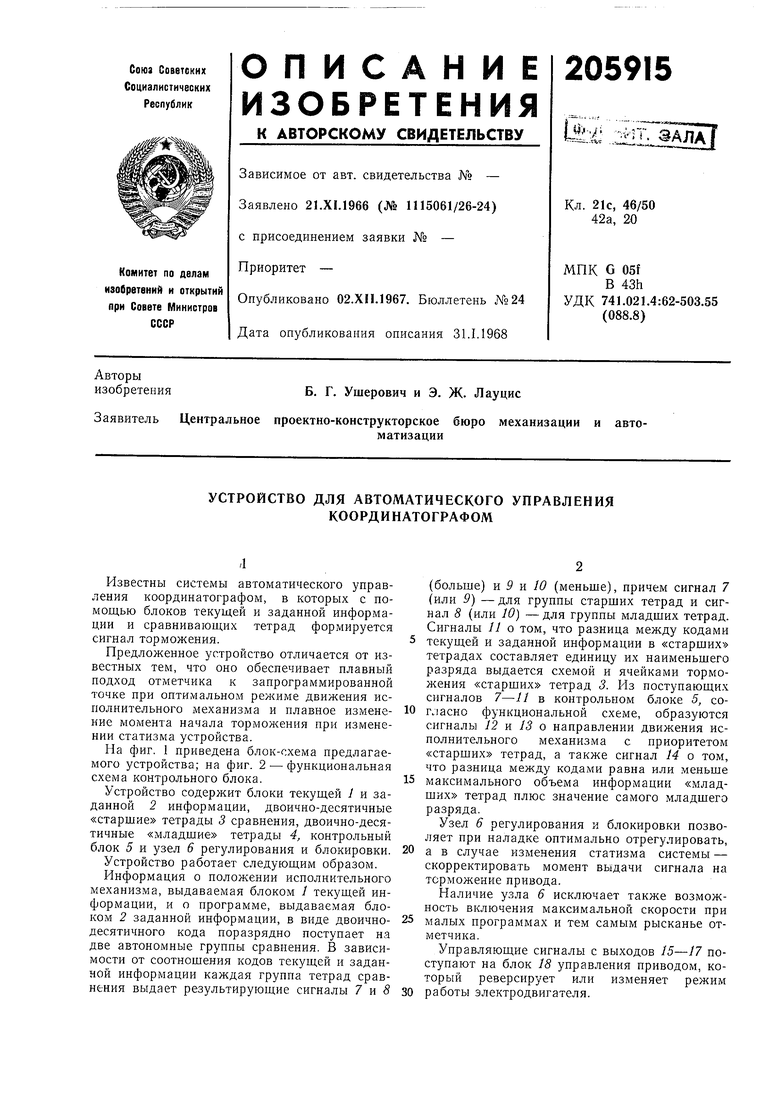
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1976 |
|
SU646304A1 |
| Устройство для контроля программ на координатографе | 1983 |
|
SU1149219A1 |
| ПРОЦЕССОР ДЛЯ ЦИФРОВОЙ СИСТЕМЫ ОБРАБОТКИ ДАННЫХ | 1971 |
|
SU305477A1 |
| Десятичный сумматор | 1974 |
|
SU523409A1 |
| Устройство для деления десятичных чисел | 1982 |
|
SU1048473A1 |
| Вычислительное устройство | 1988 |
|
SU1545215A1 |
| Преобразователь двоичного кода угла в двоично-десятично-шестидесятиричный код | 1980 |
|
SU943703A1 |
| Преобразователь двоичного кода в двоично-десятичный | 1984 |
|
SU1280702A1 |
| Устройство для отображения графической информации | 1984 |
|
SU1223283A1 |
| Устройство для контроля экспоненциальных процессов | 1984 |
|
SU1282087A1 |
fue.
