Известные устройства для автоматического вождения состоят из индукционного щуна, входящего в систему электрогидравлического управления с механической и электрической отрицательными обратными связями.
Эти устройства не обеспечивают пропорциональную зависимость между интенсивностью поворота машины и отклонением ее от траектории движения.
В предложепном устройстве с этой целью в систему управления введены фантастрон, произБOДяп- ий широтно-импульсну о .модуляцию сигнала ошибки на блок совпадений, различающий направление поворота. Кроме того, для еоздапия предварения в работе системы механическая обратная связь выполнена из ипдукционного щупа, емонтированного на выносных кронштейнах неподвижной части барабанов передних колес.
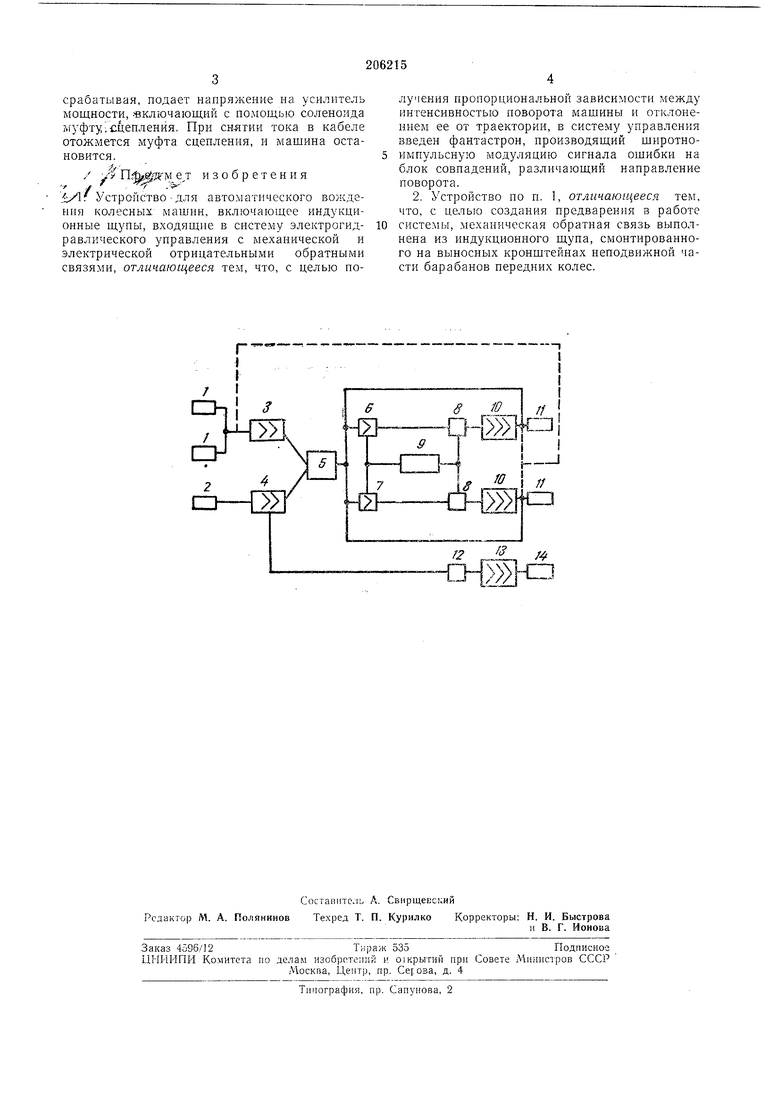
На чертеже изображена блок-схема устройства для автоматического вождения колесных машин.
В устройство входят: индукциониые щупы J, укрепленные на выносных кронштейнах неподвижной части барабанов иередиих колес колесного экипажа (на схеме не показаны), настроечная катушка 2, усилитель сигнала 3 от щупов, опорный усилитель 4, фазовый детектор 5, предварительные усилители правого 6 и левого 7 поворотов колес, блоки совпадения 8,
мультивибратор и фантастрон .9, усилители мощности JO и соленоиды // гидрораспределителей поворотов. Оиорный усилитель связан с триггером 12, усилителем мощности 13 и соленоидом 14 муфты сцепления мащины.
При отклонении щупов от проложенного кабеля сигнал усиливается, но остается неизменным в пределах отклонений настроечной катушки от траектории. Далее сигнал в фазовом
детекторе преобразуется в напрял ение постоянного тока, меняющее фазу на 180° при пересечении траектории и усиливается в предварительном уеилителе. Поступая затем в мультивибратор, который генерирует импульеы постоянной длительности и фантастрон, производящий щиротно-и.мпульсную модуляцию ранее сгенерированных импульсов, широтномодулпрованные импульсы поступают на блоки совпадений и далее в усилитель мощности.
Соленоиды производят непосредственно поворот мащииы, воздействуя на ее исполнительные органы.
Для етабилизации поворота устройство охвачено электрической и механической отрицательными связями вследствие крепления инсрабатывая, подает напряжение на усилитель мощности, включающий с немощью соленоида муфту-сцепления. При сн-ятии тока в кабеле отожмется муфта сцепления, и машина остановится.
дМ ej изобретения
- И ixlr строиство - для автоматического вождения колесных машин, включающее индукционные щупы, входящие в систему электрогидравлического управления с механической и электрической отрицательными обратными связями, отличающееся тем, что, с целью получения пропорциональной зависимости между интенсивностью поворота машины и отклонением ее от траектории, в систему управления введен фантастрон, производящий щиротноимпульсную модуляцию сигнала ошибки на блок совпадений, различающий направление поворота.
2. Устройство по п. 1, отличающееся тем, что, с целью создания предварения в работе системы, механическая обратная связь выполнена из индукционного щупа, смонтированного на выносных кронштейнах неподвижной части барабанов передних колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ | 1971 |
|
SU322142A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1586548A1 |
| Способ автоматического вождения колесного трактора и устройство для его осуществления | 1986 |
|
SU1396979A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Система рулевого управления транспортного средства | 1985 |
|
SU1710420A1 |
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1970 |
|
SU266413A1 |
Г
