со X)
О5
;о
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| Устройство для автоматического и ручного управления самоходной машиной | 1990 |
|
SU1750452A1 |
| Устройство для автоматического вождения машинно-тракторного агрегата | 1980 |
|
SU869595A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА УНИВЕРСАЛА | 2014 |
|
RU2577746C2 |
| Устройство автоматического вождения сельскохозяйственного агрегата | 1982 |
|
SU1042638A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1586548A1 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
Изобретение относится к области сельскохозяйственного машиностроения, в частности к способам и устройствам для автоматического вождения тр-акторов по следу предыдущего прохода. Целью изобретения является устранение накопления ошибки . При отклонении трактора от заданной траектории сигнал с копирующего датчика 18 сравнивается с сигналом датчика 3 обратной связи. Разностный сигнал воздействует на злектрогидравлический сервомеханизм 9 и далее на гидроцилиндр 15, поворачивающий передние колеса 1 трактора в сторону уменьшения разностного сигнала. Задние колеса 2 удерживаются при этом в нейтральном положении. В следующем проходе копирующий датчик 18 подключается к схеме 6 по сравнению следящей системы поворота задних колес 2, а передние ко леса 1 удерживаются в нейтральном положении, что позволяет при перекодировании предьщущего прохода снизить ошибку траекторного рассогласования и повысить прямолинейность движения трактора. 2 с,п. ф-лы, 1 ил. i (Л С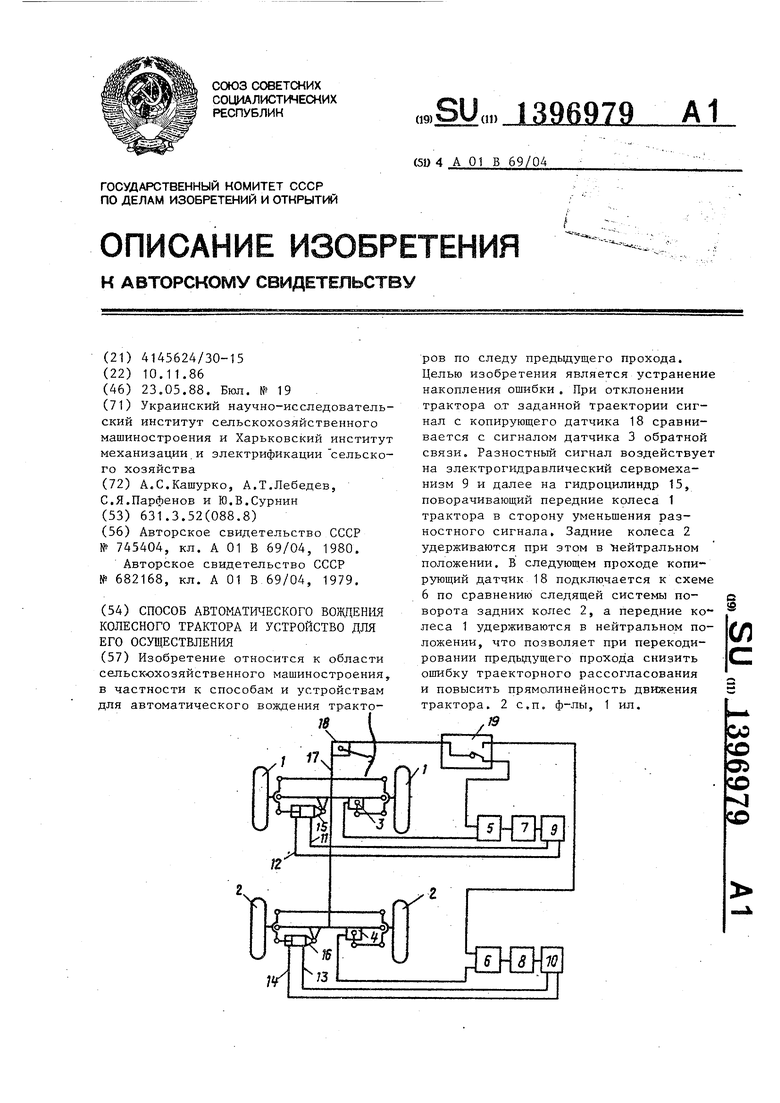
-8-10
Изобретение относится к сельскохозяйственному машиностроению, в частности к способам и устройствам для автоматического вождения тракто- ров по следу предьщущего прохода.
Цель изобретения - устранение накопления ошибки.
На чертеже показана схема устройства для осуществления способа. 1
Устройство для автоматического вождения колесного трактора состоит из двух следующих систем поворота передних 1 и задних 2 колес, каждая из которых содержит датчик 3 (4) обратной связи, соединенный через схему 5 (6) сравнения с усилителем 7 (8), к выходу которого подключен электрогидравлический сервомеханизм 9 (10), соединенный гидромагистралями 11 и 12 (13 и 14) с гидроцилиндром 15 (16) для подвода к нему рабочей жидкости. На раме 17 трактора закреплен копирующий датчик 18, соединенный через переключатель 19 с входом каждой схемы 5 и 6 сравнения.
Устройство работает следующим образом.
При положении переключателя 19, как показано на схеме, функция управления поворотом трактора при автоматическом вождении возложена на следящую систему поворота передних колес 1. При отклонении трактора от заданной траектории сигнал с копирующего датчика 18, проходя через переключатель 19, сравнивается с сигналом датчика 3 обратной связи в схеме 5 сравнения , усиливается усилителем 7 и поступает в электрогидравлический сервомеханизм 9, который посылает по магистрали 11 (12) поток рабочей жидкости в соответствующую полость гидроцилиндра 15. Последний поворачивает передние колеса 1 для движения трактора в сторону уменьшения отклонения копирующего датчика 18 от заданной траектории. Вторая следящая система удерживает задние .колеса 2 в нейтральном положении, так как на схему 6 сравнения поступает только сигнал от датчика 4 обратной связи.
В начале следующего прохода трак- торист переводит переключатель 19 в другое положение и копирующий датчик 18 подключается к схеме 6 сравнения
ВНИИПИ Заказ 2542/1
10
15
20
25
30
35
40
45
50
55
следящей системы поворот колес 2. Передние колеса ваются в нейтральном Пол следящей системой, а фун ления поворотом трактора на слудящую систему пово колес 2. Сигнал с копиру чика 18 сравнивается с с чика 4 обратной связи в нения, усиливается усили поступает в электрогидра сервомеханизм 10, которы по магистрали 13 (14) по жидкости в соответствующ гидроцилиндра 16 и повор ние колеса 2 для движени сторону уменьшения откло рующего датчика 18 от за ектории.
Применение предлагаем автоматического перекопи дьщущего прохода колесно с двумя парами управляемы позволит повысить прямол автоматического движения посеве по сравнению с ис известных способов автов
Формула изоб
2,Устройство для авт вождения колесного тракт щее копирующий датчик и п дящую систему с датчиком связи, подключенным к пер схемы сравнения следящей
о тл ичающее с я с целью устранения накопл устройство дополнительно вторую следящую систему тель, соединенный своим щупом, а выходами - с вт схем сравнения первой и щих систем.
Тираж 661Подписное
Произв,-полигр. пр-тие, г, Ужгород, ул. Проектная, 4
0
5
0
5
0
5
0
5
0
5
следящей системы поворота задних колес 2. Передние колеса 1 удерживаются в нейтральном Положении своей следящей системой, а функция управления поворотом трактора возлагается на слудящую систему поворота задних колес 2. Сигнал с копирующего датчика 18 сравнивается с сигналом датчика 4 обратной связи в схеме 6 сравнения, усиливается усилителем 8 и поступает в электрогидравлический сервомеханизм 10, который посылает по магистрали 13 (14) поток рабочей жидкости в соответствующую полость гидроцилиндра 16 и поворачивает задние колеса 2 для движения трактора в сторону уменьшения отклонения копирующего датчика 18 от заданной траектории.
Применение предлагаемого способа автоматического перекопирования предьщущего прохода колесного трактора . с двумя парами управляемых колес позволит повысить прямолинейность автоматического движения трактора при посеве по сравнению с использованием известных способов автовождения.
Формула изобретения
о тл ичающее с я тем, что, с целью устранения накопления ошибки, устройство дополнительно содержит вторую следящую систему и переключатель, соединенный своим входом со щупом, а выходами - с вторыми входами схем сравнения первой и второй следящих систем.
| Способ автоматического вождения колесных тракторов и устройство для его осуществления | 1979 |
|
SU745404A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического управления самоходной машиной | 1975 |
|
SU682168A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
