Изобретение относится к подъемно-транспортному оборудованию, а именно к захватным устройствам крупнотоннажных контейнеров.
Известно захватное устройство для контейнеров, содержащее траверсу с подвешенной к ней на тягах несущей рамой, установленные на раме направляющие для наводки устройства на контейнер и поворотные захватные кулачковые элементы, снабженные механизмом поворота, содержащим «падающий» рычаг с закрепленным на нем диском с пазами и собачкой, взаимодействующей с диском и упорами рамы (см. а.с. SU № 682441, МКИ В 66 С 1/66).
Недостатком известного устройства является низкая надежность в работе, обусловленная большим количеством быстро изнашиваемых сопряженных деталей, а именно собачек с диском и упорами, тяг с рычагом.
Наиболее близким к заявляемому является захватное устройство для контейнеров, содержащее траверсу, кинематически соединенную с нею раму, размещенные на раме кулачковые захватные элементы, снабженные механизмами поворота, состоящими из вала с жестко закрепленным на нем двуплечим рычагом и сектором с двумя пазами, соответствующими открытому и закрытому положению захватных элементов, взаимодействующих со стопором, управляемым дистанционно электромагнитом, при этом захватные элементы соединены с помощью тяг и рычагов с валом механизма их поворота, а траверса снабжена упором и контргрузом, взаимодействующими с двуплечим рычагом (см. а.с. SU № 1209570, МКИ В 66 С 1/66).
Недостатками известного устройства является низкая надежность, обусловленная частым износом сопряжения - стопор - сектор механизма поворота захватных элементов, наличием большого количества шарниров и протяженных тяг. Кроме того, низкая маневренность захвата и необходимость ручной настройки с помощью винтовых муфт при захвате контейнеров с измененным в результате эксплуатации расстоянием между фитингами.
Техническим результатом заявленного технического решения является повышение маневренности и надежности работы в автоматическом режиме.
Технический результат достигается тем, что в захватном устройстве для контейнеров с фитингами, содержащем траверсу, несущую раму, состоящую из продольных и поперечных балок, установленные на несущей раме направляющие для наводки устройства на контейнер и захватные головки, снабженные механизмом поворота, несущая рама выполнена поворотной, жестко закрепленной на зубчатом венце механизма ее поворота, взаимодействующем с шестерней вертикального мотор-редуктора с тормозом, установленных на траверсе, при этом на концах продольных балок несущей рамы с каждой стороны закреплена съемная поперечная концевая балка с захватными головками и механизмом их поворота, состоящим из электропривода, устройства поворота, включающего зубчатый сектор, взаимодействующий с шестерней редуктора электропривода и выходящий из зацепления с шестерней в момент достижения захватными головками рабочего положения «Закрыто» или «Открыто», и тяг, соединяющих зубчатый сектор с захватными головками, причем на валу электродвигателя электропривода механизма поворота установлен фланец с упругим диском с радиальными отверстиями, а на быстроходном валу редуктора муфта предельного момента с пальцами, входящими в радиальные отверстия упругого диска, а каждая захватная головка состоит из фитинговой головки, установленной соосно в стакане, и снабжена амортизатором, размещенным между корпусом концевой балки и стаканом.
Фиг.1 - общий вид захватного устройства.
Фиг.2 - вид сверху на фиг.1.
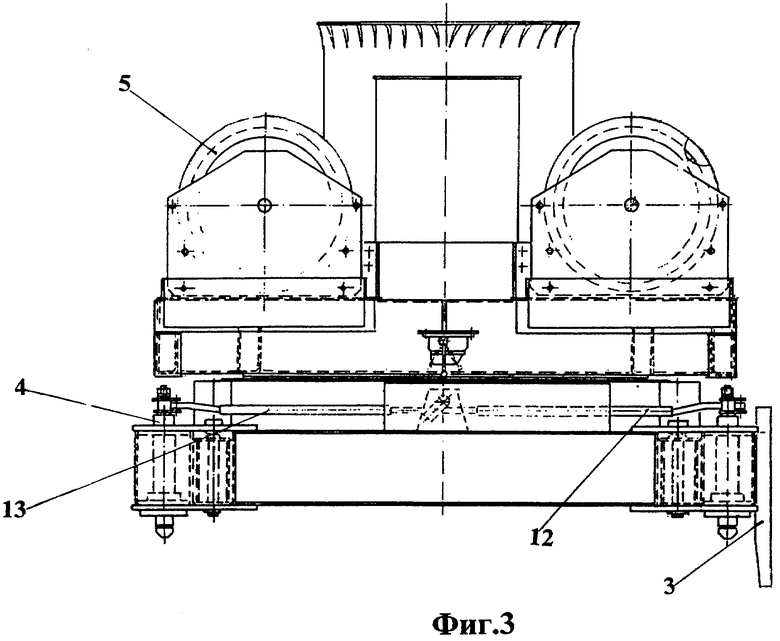
Фиг.3 - вид сбоку на фиг.1.
Фиг.4 - разрез по А-А на фиг.2.
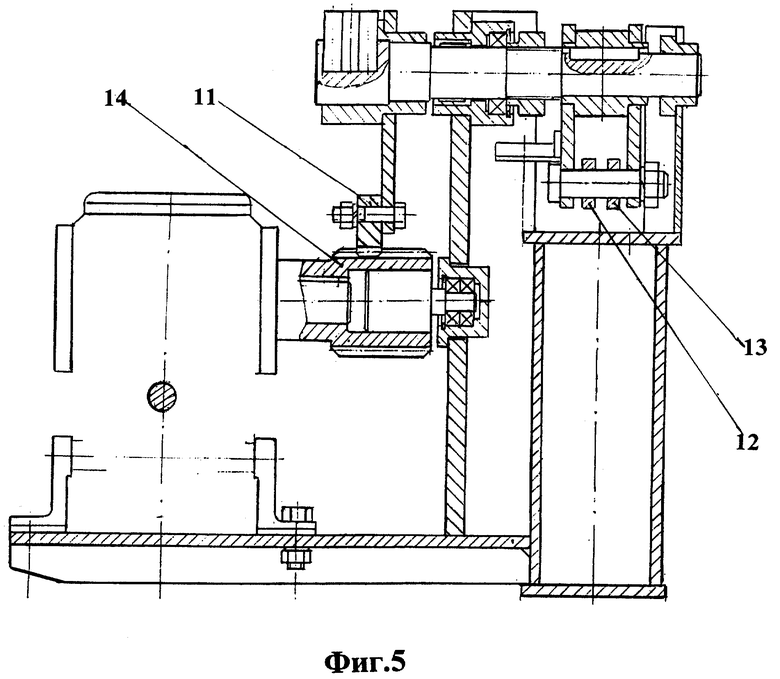
Фиг.5 - разрез по Б-Б на фиг.2.
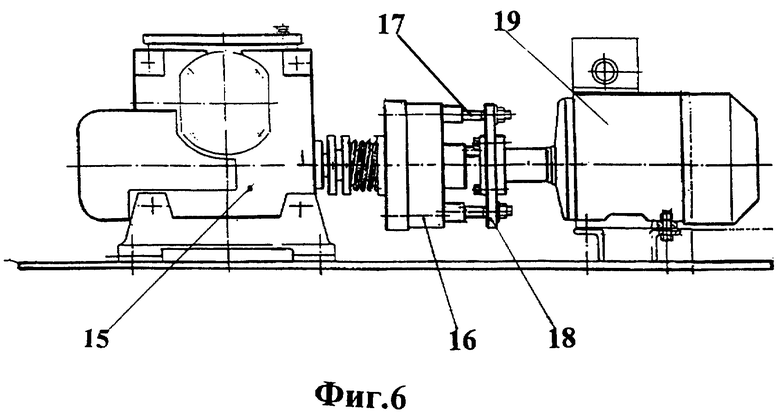
Фиг.6 - электропривод механизма поворота захватных головок.
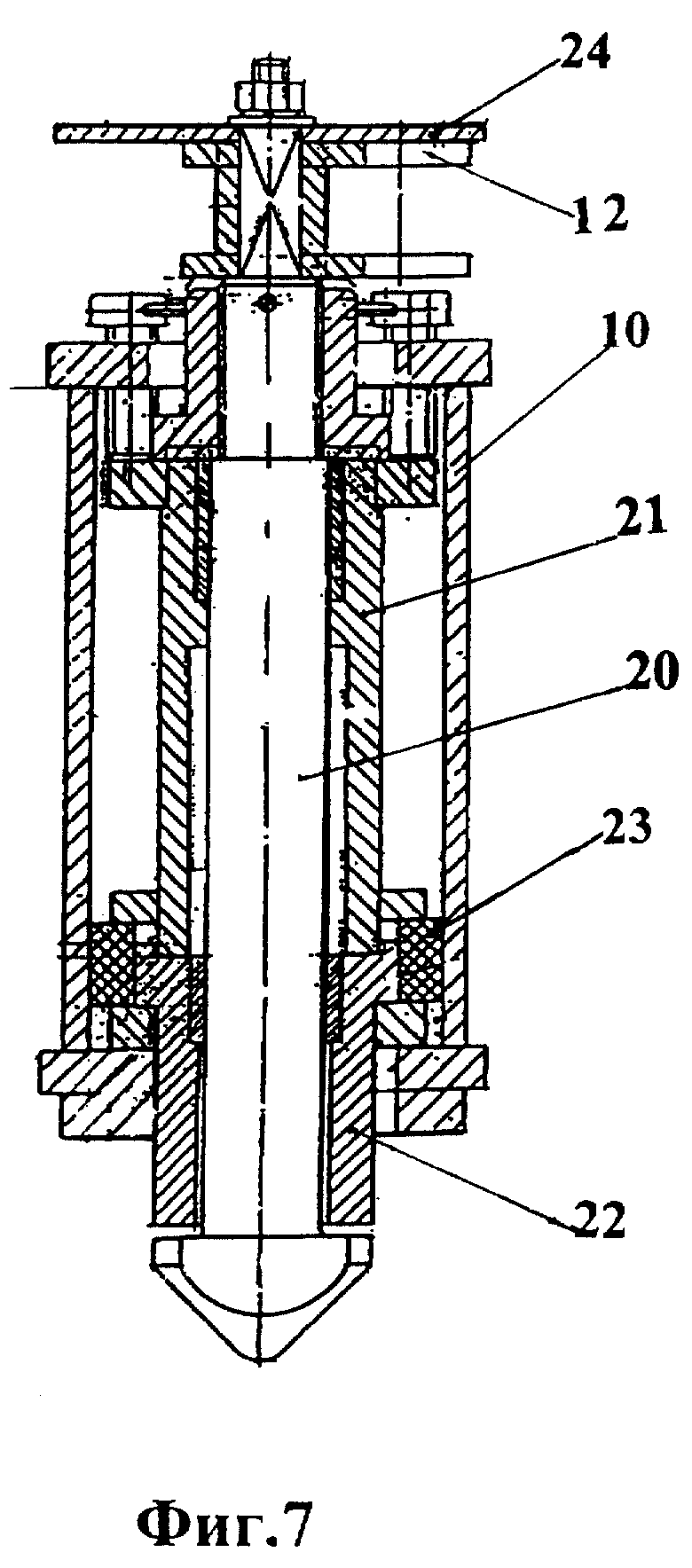
Фиг.7 - захватная головка. Вид в разрезе.
Выполнение несущей рамы захватного устройства поворотной относительно траверсы повышает маневренность и надежность, т.к. позволяет крановщику, управляя из кабины, автоматически и надежно захватить контейнеры, расположенные на площадке, переместить их и выгрузить в любом месте.
Размещение на концах продольных балок несущей рамы с каждой стороны съемной поперечной концевой балки с захватными головками и механизмом их поворота, отдельным для каждой пары захватных головок, повышает надежность работы за счет применения индивидуального привода и укороченных тяг механизма поворота.
Кроме того, возможность быстрой смены поперечной концевой балки с размещенным на ней оборудованием повышает оперативность ремонтных работ.
Применение для поворота захватных головок зубчатого сектора с электроприводом, выходящего из зацепления с приводной шестерней в момент достижения захватными головками рабочего положения «Закрыто» или «Открыто», повышает надежность захвата и освобождение контейнеров, т.к. поворот захватных головок прекращается независимо от времени остановки привода, и соответственно, независимо от настройки конечных выключателей, которые выполняют при этом только функции блокировки.
Снабжение вала электродвигателя привода механизма поворота захватных головок фланцем с упругим диском с радиальными отверстиями, а быстроходного вала редуктора муфтой предельного момента с пальцами, которые входят в радиальные отверстия упругого диска, позволяет обеспечить передачу крутящего момента при перекосе осей валов, то есть повышается надежность работы и оперативность ремонта при замене механизмов привода.
Установка фитинговой головки захвата в стакане с амортизатором, размещенным между корпусом концевой балки и стаканом, позволяет надежно захватить контейнеры, получившие при эксплуатации отклонения от нормы размера между фитингами, и уменьшить ударные нагрузки на фитинговую головку при неточном опускании захватного устройства на контейнер за счет перераспределения нагрузок и передачи их на усиленный верхний пояс концевой балки.
Захватное устройство для контейнеров с фитингами содержит траверсу 1, поворотную несущую раму 2, установленные на несущей раме 2 направляющие 3 для наводки устройства на контейнер, захватные головки 4, снабженные механизмом поворота. Траверса 1 состоит из балок коробчатого сечения, соединенных снизу в средней части опорным листом для крепления опоры механизма поворота несущей рамы 2. На траверсе 1 размещены блоки 5 для запасовки канатов, которыми захват связан с грузовой тележкой крана, вертикально установленный мотор-редуктор с тормозом 6 и зубчатой шестерней 7, находящейся в зацеплении с зубчатым венцом 8 механизма поворота несущей рамы 2, жестко закрепленной с помощью болтов 9 на зубчатом венце 8. Несущая рама 2 состоит из продольных и поперечных балок коробчатого сечения. В средней части несущей рамы 2 к балкам приварена опорная плита с отверстиями для крепления ее к зубчатому венцу 8 траверсы 1. На выступающих концах продольных балок несущей рамы 2 с каждой стороны закреплены быстросъемные концевые балки 10 с захватными головками 4. Захватные головки 4 каждой концевой балки 10 снабжены механизмом их поворота, состоящим из электропривода, устройства поворота, включающего зубчатый сектор 11, и двух тяг 12, 13, соединяющих зубчатый сектор 11 с захватными головками 4, при этом зубчатый сектор 11 входит в зацепление с шестерней 14 тихоходного вала червячного редуктора 15 электропривода, установленного на подмоторной плите, приваренной к концевой балке 10. Устройство поворота и тяги 12 и 13 расположены наверху концевой балки 10 и обеспечивают кинематическую связь между электроприводом и захватными головками 4. На удлиненном быстроходном вале червячного редуктора 15 установлена многодисковая муфта 16 предельного момента. Пальцы 17 муфты 16 входят в зацепление с радиальными отверстиями упругого диска 18 фланца вала электродвигателя 19, обеспечивающими надежную работу электропривода при перекосе осей его механизмов и предохраняющими электропривод от перегрузок. Захватные головки 4, установленные в отсеках по краям концевой балки 10, состоят из фитинговой головки 20, установленной в стаканах 21 и 22, и снабжены амортизатором 23, размещенным между корпусом концевой балки и стаканом 22, и указателем поворота 24, при этом установка амортизатора 23 позволяет захватить контейнеры, получившие при эксплуатации отклонения от нормы до 5 мм размера между фитингами.
Захватное устройство работает следующим образом.
Устройство на канатах через блоки траверсы 1 подвешивают на грузовую тележку крана. Управление работой захватного устройства осуществляют из кабины крановщика, где установлено два кнопочных поста. Один пост для поворота несущей рамы 2 («Поворот вправо», «Поворот влево»), второй пост для управления захвативши головками («Закрыто», «Открыто»).
При опускании устройства на контейнер захватные головки 4 находятся в открытом положении, при этом зубчатый сектор 11 находится вне зацепления с шестерней 14 тихоходного вала червячного редуктора 15 электропривода механизма поворота захватных головок. Захватное устройство опускают на контейнер так, чтобы направляющие 3 для наводки устройства на контейнер касались одной из сторон контейнера, при этом при необходимости используют устройство поворота несущей рамы 2, осуществляя из кабины крановщика поворот ее кнопками «Поворот вправо» или «Поворот влево». При включении мотор-редуктора с тормозом 6 его шестерня 7, вращаясь, поворачивает зубчатый венец 8 с жестко закрепленной на нем несущей рамой 2 вправо или влево. Точность остановки обеспечивается тормозом. Когда захватные головки 4 войдут в отверстия угловых фитингов контейнера и несущая рама 2 опустится на контейнер, крановщик кнопкой «Закрыто» включает электропривод механизма поворота захватных головок, при этом шестерня 14 тихоходного вала червячного редуктора 15 начинает вращаться, входит в зацепление с зубчатым сектором 11 и поворачивает захватные головки 4 в положение «Закрыто», после чего выходит из зацепления. Контейнер транспортируется в нужное место, при необходимости разворачивается с помощью поворота несущей рамы 2 и опускается на транспортное средство или площадку. Затем крановщик кнопкой «Открыто» включает электропривод механизма поворота захватных головок, при этом шестерня 14 начинает вращаться в другую сторону, входит в зацепление с зубчатым сектором 11, поворачивая захватные головки 4 в положение «Открыто». В момент достижения захватными головками рабочего положения зубчатый сектор 11 выходит из зацепления с шестерней 14 и поворот фитинговых головок 20 прекращается независимо от времени остановки электропривода и, соответственно, независимо от настройки конечных выключателей, которые выполняют при этом только функции блокировки. При нахождении захватных головок открытыми захватное устройство поднимают, фитинговые головки 20 выходят из фитингов контейнера, и устройство перемещают к другому контейнеру.
Захватное устройство, обеспечивающее автоматический надежный захват, освобождение контейнеров и оперативность ремонта, найдет промышленное применение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПРЕДЕР НАКЛОННЫЙ ДЛЯ КОНТЕЙНЕРОВ | 2017 |
|
RU2667206C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| СПРЕДЕР ТЕЛЕСКОПИЧЕСКИЙ | 2013 |
|
RU2533620C1 |
| СПОСОБ ПЕРЕГРУЗКИ КОНТЕЙНЕРОВ | 2018 |
|
RU2703365C1 |
| Захватное устройство ддя контейнеров | 1974 |
|
SU682441A1 |
| Захватное устройство для кон-ТЕйНЕРОВ | 1979 |
|
SU812690A1 |
| Съёмное оборудование для крепления среднетоннажных модулей | 2024 |
|
RU2828309C1 |
| Устройство для механизированной застройки и отстропки контейнеров | 1961 |
|
SU142742A1 |


Изобретение относится к подъемно-транспортному оборудованию, а именно к захватным устройствам крупнотоннажных контейнеров. Захватное устройство для контейнеров с фитингами содержит траверсу, несущую раму, состоящую из продольных и поперечных балок, установленные на несущей раме направляющие и захватные головки, снабженные механизмом поворота, несущая рама выполнена поворотной, жестко закрепленной на зубчатом венце механизма ее поворота, взаимодействующем с шестерней вертикального мотор-редуктора с тормозом, установленных на траверсе. На концах продольных балок несущей рамы с каждой стороны закреплена съемная поперечная концевая балка с захватными головками и механизмом их поворота, состоящим из электропривода, устройства поворота и тяг, соединяющих зубчатый сектор с захватными головками. На валу электродвигателя электропривода механизма поворота установлен фланец с упругим диском с радиальными отверстиями, а на быстроходном валу редуктора муфта предельного момента с пальцами, каждая захватная головка состоит из фитинговой головки и снабжена амортизатором. Технический результат - повышение маневренности и надежности работы в автоматическом режиме. 7 ил.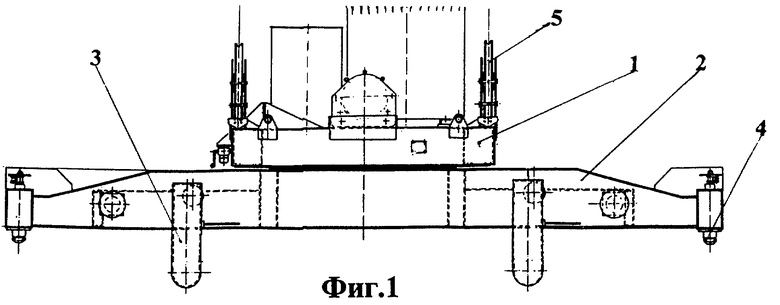
Захватное устройство для контейнеров с фитингами, содержащее траверсу, несущую раму, состоящую из продольных и поперечных балок, установленные на несущей раме направляющие для наводки устройства на контейнер и захватные головки, снабженные механизмом поворота, отличающееся тем, что несущая рама выполнена поворотной, жестко закрепленной на зубчатом венце механизма ее поворота, взаимодействующем с шестерней вертикального мотор-редуктора с тормозом, установленных на траверсе, при этом на концах продольных балок несущей рамы с каждой стороны закреплена съемная поперечная концевая балка с захватными головками и механизмом их поворота, состоящим из электропривода, устройства поворота, включающего зубчатый сектор, взаимодействующий с шестерней редуктора электропривода и выходящий из зацепления с шестерней в момент достижения захватными головками рабочего положения "Закрыто" или "Открыто", и тяг, соединяющих зубчатый сектор с захватными головками, причем на валу электродвигателя электропривода механизма поворота установлен фланец с упругим диском с радиальными отверстиями, а на быстроходном валу редуктора муфта предельного момента с пальцами, входящими в радиальные отверстия упругого диска, а каждая захватная головка состоит из фитинговой головки, установленной соосно в стакане, и снабжена амортизатором, размещенным между корпусом концевой балки и стаканом.
| Захватное устройство для контейнеров | 1984 |
|
SU1209570A1 |
| Захватное устройство для контейнеров | 1973 |
|
SU481522A1 |
| Керамическая смесь для изготовления литейных стержней | 1984 |
|
SU1217550A1 |
| Захватное устройство для контейнеров | 1980 |
|
SU954353A1 |
| US 2003168871 А, 11.09.2003 | |||
| JP 2001129781 А, 15.05.2001. | |||

