(54) КРАН МОСТОВОГО ТИПА

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для труб | 1980 |
|
SU952720A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Кран мостового типа | 1980 |
|
SU893825A2 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |
| Кран мостового типа | 1977 |
|
SU652091A1 |
| Захватное устройство для длинномерных грузов | 1982 |
|
SU1094833A2 |
| Грузовая тележка крана | 1977 |
|
SU624870A1 |
| Клещевой захват | 1973 |
|
SU673584A1 |
| Тележка для крана мостового типа | 1980 |
|
SU895901A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
I
Изобретение относится к подъемно-транспортному машиностроению, а именно к кранам мостового типа, предназначенным для транспортировки труб.
По основному авт. св. № 652091 известен кран мостового типа, содержащий грузовую тележку с траверсой, несущей приводные каретки с захватными лапами, подвешенной к тележке с помощью полиспастных систем, имеющих подвижные и неподвижные блоки, при этом на каждой каретке смонтирован один из подвижных блоков полиспастной системы, а на траверсе - обводные блоки и канатная лебедка, канаты которой свободным концом закреплены на каждой каретке 1.
Однако указанная конструкция крана не может обеспечить погрузку и выгрузку труб максимальной длины в нижний ярус железнодорожного полувагона из-за нехватки свободного пространства для вывода лап захвата из зацепления и поднятия траверсы.
Цель изобретения - обеспечение освобождения захвата от труб в стестенных условиях.
Поставленная цель достигается тем, что каждая каретка снабжена поворотно установленными и соединенными между собой двуплечими рычагами, один из которых связан со свободным концом каната лебедки, а другой рычаг выполнен Г-образным и соединен посредством тяги с поворотно установленным на каретке подхватным элементом захватной лапы.
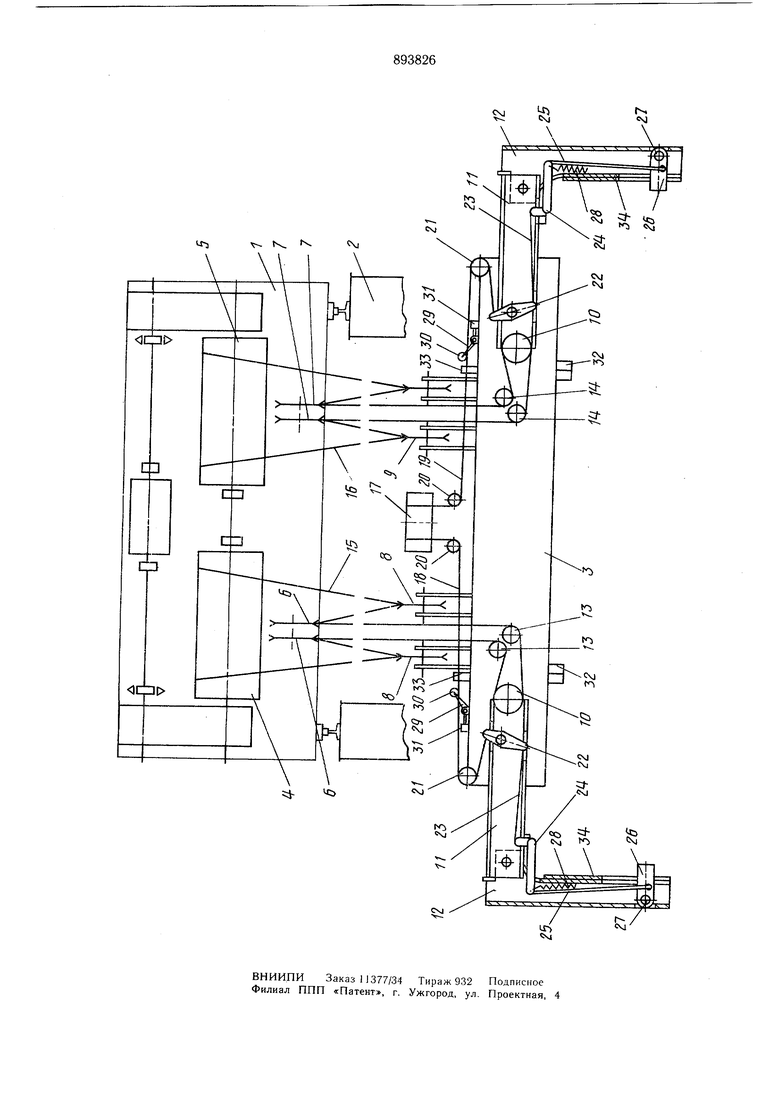
На чертеже представлен кран мостового типа, кинематическая схема.
Кран мостового типа содержит грузовую
10 тележку 1, перемещающуюся по пролетным балкам 2 мостового крана и имеющую механизм подъема грузозахватной траверсы 3. Механизм подъема представляет собой соединенные жесткой кинематической связью 15 полиспастные системы, барабаны 4 и 5 которых и неподвижные блоки 6 и 7 смонтированы на тележке 1, подвижные блоки 8 и 9 укреплены на грузозахватной траверсе 3, а подвижные блоки 10 - на каретках 11, размещенных на траверсе 3. На карет20ках 11 крепятся захватные лапы 12. Кроме того, на траверсе установлены обводные блоки 13 и 14. Канаты 15 и 16 полиспастных систем, сойдя с барабанов 4 и 5 и обогнув
в соответствии со схемой блоки 6-10, 13 и 14, образуют два трехкратных сдвоенных полиспаста. На траверсе 3 размещена канатная лебедка 17, канаты 18 и 19 которой огибают блоки 20 и 21 и своими свободными концами укреплены на концах двуплечих рычагов 22, установленных шарнирно на каретках II, другие концы рычагов 22 соединены с помощью тяг 23 с одними концами Г-образных двуплечих рычагов 24. Последние также щарнирно укреплены на каретках 11, а их свободные концы с помощью тяг 25 соединены с подхватными элементами 26 , шарнирно закрепленными в лапах 12 на осях 27. К тем же концам Г-образных рычагов 24 крепятся пружины растяжения 28. На траверсе 3 расположены также двуплечие рычаги 29 с блоками 30 на одних концах, взаимодействующими с канатами 18 и 19, и другими концами воздействующие на конечные выключатели 31. Кроме того, на траверсе 3 в ее нижней части щарнирно укреплены рычаги 32, взаимодействующие с конечными выключателями 33. Лапы 12 по вертикальной поверхности, контактирующей с торцом трубы, облицованы стальными калеными накладками 34.
Кран работает следующим образом.
При неподвижных канатах 18 и 19 наматывание на барабаны 4 и 5 канатов 15 и 16 или их сматывание приводит к подъему или опусканию траверсы 3. При этом каретки 11 остаются неподвижными. При неподвижных канатах 15 и 16 наматывание или сматывание канатов 18 и 19 лебедкой 17 приводит соответственно к разведению или сведению кареток 11. При нажатии на кнопку «сведение кареток канаты 18 и 19 сматываются с барабана лебедки 17 до тех пор пока лапы 12 своими накладками 34 не упрутся в торцы поднимаемой трубы. При дальнейщем сматывании канаты 18 и 19 прослабляются, ролики 30 опускаются, воздействуя рычагами 29 на конечные выключатели 31, которые отключают механизм лебедки 17 и включают подъем. При прослаблении канатов 18 и 19 пружины 28, воздействуя на рычаги 24 и тяги 25, опускают подхватные элементы 26 из вертикального положения в горизонтальное и подхватывают трубу. После транспортировки трубы на место установки, например.
В полувагон, грузозахватная траверса 3 с трубой опускается. После укладки трубы на основание при дальнейщем опускании грузозахватной траверсы происходит касание трубы рычагами 32 и срабатывание
конечных выключателей 33, которые выключают механизм подъема. После этого можно развести лапы 12 и поднять грузозахватную трубу 3. Для этого достаточно нажать на кнопку «разведение кареток. При этом, как только канаты 18 и 19 натянутся, ры чаги 22 повернутся и повернут с помощью тяг 23 рычаги 24, которые, в свою очередь, растягивая пружины 28, с помощью тяг 25 поставят подхватные элементы 26 в вертикальное положение. После этого грузозахватную траверсу 3 можно поднять, не производя дальнейщего раздвижения лап 12. Такая конструкция позволяет уменьшить торцовые зазоры в полувагонах и тем самым удлинить максимальную длину трубы, укладываемой в нижний ярус полувагона.
Использование предлагаемой конструкции крана в народном хозяйстве позволит получить ориентировочно экономию в размере 100 тыс. руб. на один кран. За счет того, что можно использовать трубы большей длины, исключена лишняя технологическая операция - разрезание труб на трубы , меньщей длины, что, в свою очередь, приводит к уменьшению качества стыков на траверсе трубопровода и повыщению производительности труда.
Формула изобретения
Кран мостового типа по авт. св. № 652091, отличающийся тем, что, с целью обеспечения удобства эксплуатации -крана в стесненных условиях, каждая каретка снабжена поворотно установленными и соединенными между собой двуплечими рычагами, один из которых связан со свободным концом
0 каната лебедки, а другой рычаг выполнен Г-образным и соединен посредством тяги с поворотно установленным на каретке подхватным элементом захватной лапы.
Источники информации, принятые во внимание при экспертизе
№ 652091, кл. В 66 С 17/00, 1977 (прототип).
