Известные устройства для автоматической ориентации детали тина цилиндра по отверстию, перпендикулярному к ее оси, содержат механизм ннтания и механизм вторичной ориентации. Педостато их в том, что движение ориентирующих органов осуществляется от различных приводов, размещенных в зоне сборки. Узлы сборочного механизма приходится располагать отдельно и соединять транспортными устройствами.
Предложенное устройство отличается тем, что нодача деталей и их ориентация совмещены в одном блоке, это дает возможность объединить неско;гько сборочных устройств в одном механизме, упростить конструкцию устройства и освободить рабочую зону сборки.
Блок включает в себя ненодвижный корпус с трубчатым магазином и ротор с подпружинеиными фиксаторами-ловителями, кинематически связанными с приводом их независимо0 движения.
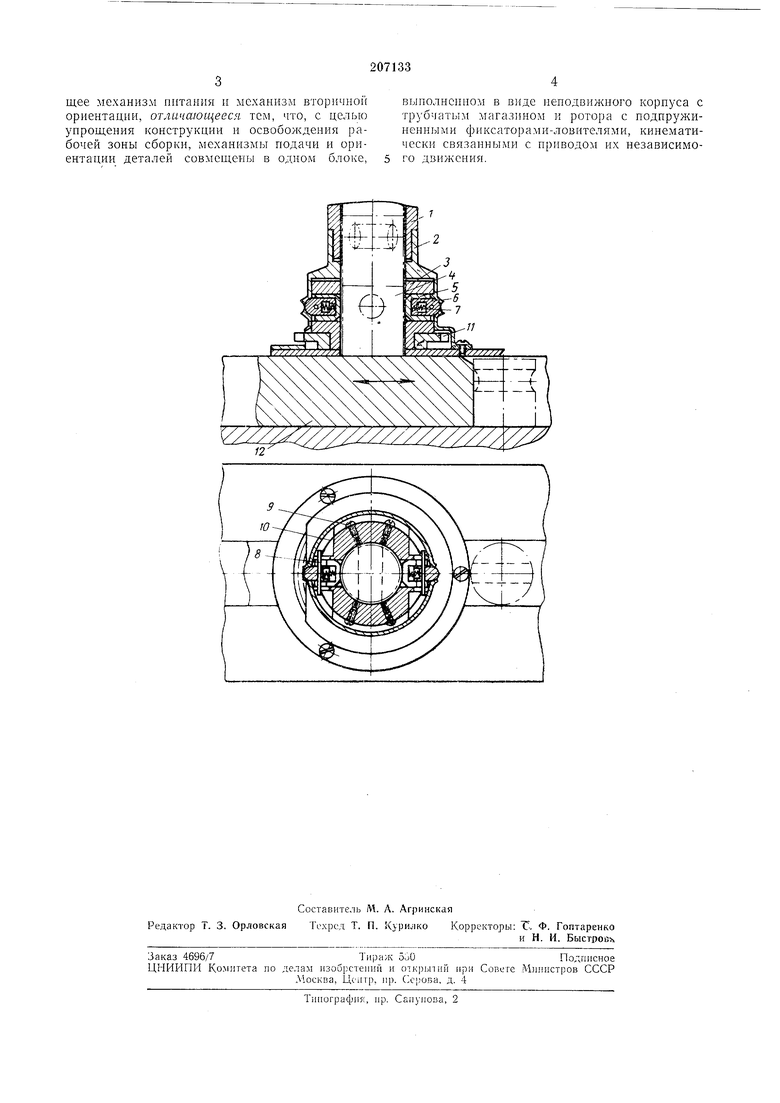
Па чертеже изображено устройство в двух нроекциях.
Устройство содержит механизм нитания, нредставляющий собой магазин 1, впрессованный в полый неподвижный корпус 2, внутри которого размещен ротор 3 с центральным отверстием для прохода ориентируемой детали 4. В радиальных отверстиях ротора 3 находятся телескопические ловители-фиксаторы
5, 6, разжимаемые пружинами 7 и соединенные щтифтами 8.
Штифты 8 по свободной посадке входят в паз ротора 3, паз ловителя 5 и удерживаются
по прессовой посадке в отверстиях фпксаторов 6.
В углублении ротора 3 винтами 9 закреплены пластинчатые пружины 10, концы которых упираются в штифты 8 и постоянно прижимают фиксаторы-ловители к внутренней стенке корпуса 2. Ротор 3 неподвижно соединен с приводной шестерней //, пернодически входящей в заценление с приводным сектором (на чертеже не показан).
При вращеннн шестерни вместе с ротором 3 фиксаторы 6, выходя из лунок корпуса 2, прижимают ловители 5 к стенкам ориентируемой детали. Ловители заскакивают в отверстие детали и новорачнвают ее до совмещения
лунок корпуса 2 с фиксаторами 6. Последние под действием пластинчатых пружин 10 иерем.ещаются в лунки вместе с ловителями 5 и освобождают деталь 4. Шпбер 12 выдает деталь на позицию сборки.
Предмет изобретения
щее механизм питания и механизм вторнчнок орнентации, отличающееся тем, что, с целью упрощения конструкции и освобождения рабочей зоны сборки, механизмы подачи и ориентации деталей совмеп;ены в одном олоке, 5 го движения.
выиолнеином в виде неподвижного корпуса с трубчатым магаз1 ном и ротора с подпружипенными фиксаторами-ловителями, кинематически связанными с приводом их пезависимо
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЗИЦИОННЫЙ АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1972 |
|
SU435915A1 |
| Устройство для запрессовки втулок | 1984 |
|
SU1183344A1 |
| УСТРОЙСТВО для ОРИЕНТАЦИИ ДЕТАЛЕЙ ТИПА | 1968 |
|
SU231300A1 |
| Устройство для ориентирования при сборке детали типа втулки с боковым отверстием | 1980 |
|
SU946879A2 |
| Устройство для сборки прессовых соединений деталей типа "вал-втулка | 1976 |
|
SU733952A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДЕТАЛЕЙ ПРИ СБОРКЕ | 1996 |
|
RU2108217C1 |
| Устройство для ориентации деталей | 1988 |
|
SU1537463A1 |
| Устройство для ориентации втулок при сборке | 1977 |
|
SU722725A1 |
| Автоматическая роторная линия для сборки радиочастотных соединителей | 1978 |
|
SU785924A1 |
| Ориентирующее устройство | 1989 |
|
SU1761437A1 |