Известны устройства для управления горнотранспортными работами на карьере, содержащие матрицу маршрутов, матрицу поиска адресов, логические элементы, распределитель, коммутатор, схему учета, схему сравнения, схему «И, индикаторы и, блок управления.
Предлагаемое устройство отличается тем, что оно содержит блок изменения алгоритма, первый выход которого подсоединен ко входу логического элемента пунктов назначения, а второй выход - ко входу логического элемента составов. Вторые входы логических элементов пунктов назначения и составов соединены с горизонтальными и вертикальными шинами матрицы поиска адреса, входы которой подключены через матрицу маршрутов к выходам коммутатора. Входы коммутатора соединены с выходами распределителя, подключеиного к выходам блока управления, вход которого через схему «И и индикаторы подсоединен к выходам логических элементов пунктов назначения и составов. Вторые выходы логических элементов пунктов назначения и составов соединены через схему учета и схему сравнения с одним входом блока изменения алгоритма, другой вход которого через переключатель режима работы связан с выходами распределителя.
Это позволяет осуществить оптимальное управление работами на карьере.
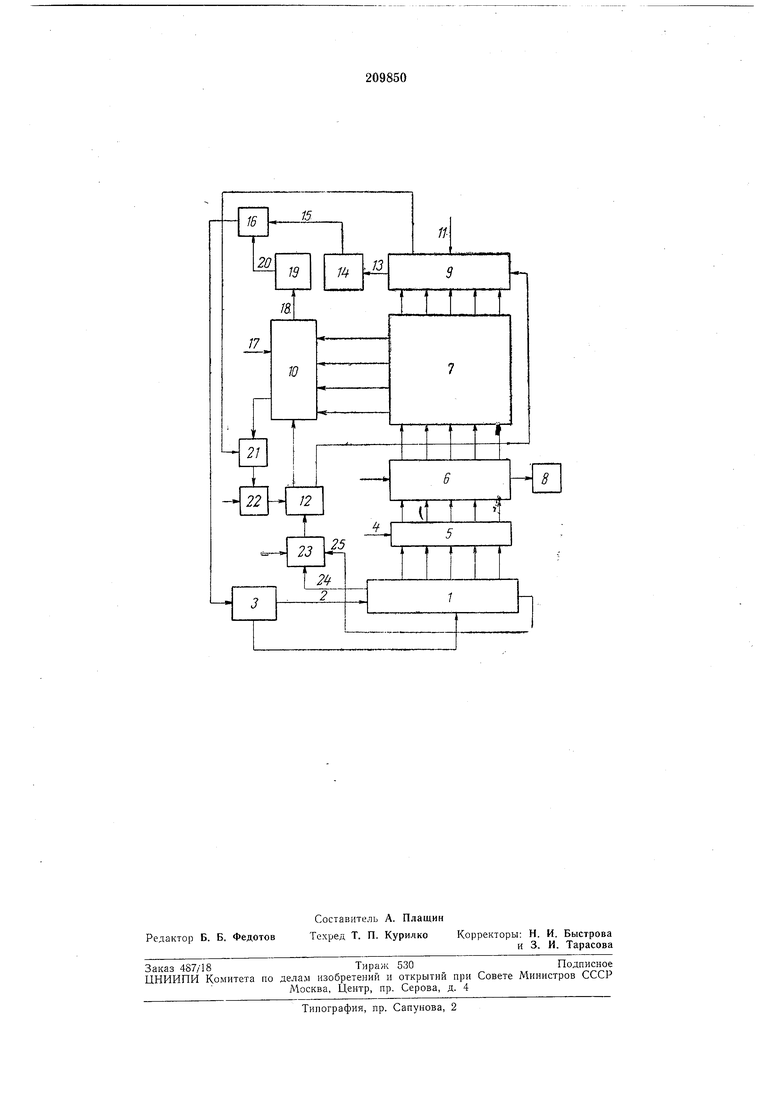
На чертеже приведена схема предлагаемого устройства.
Распределительный регистр 1 служит для распределения импз льсов по времени. Он продвигается импульсами, поступающими на его вход 2 с блока управления 3. На выходе распределительного регистра последовательно во времени возникают импульсы.
Каждым импульсом распределительного регистра опрашивается определенный предполагаемый маршрут движения составов, причем критерием отнесения импульса к тому или иному маршруту (или, иными словами, критерием очередности опроса маршрутов) является среднее время пробега состава по данному маршруту. Таким образом, маршруты опрашиваются последовательно в порядке увеличения времени пробега составов.
Для ввода критериев оптимальности 4 выбора маршрутов по минимальному времени пробега составов (программы опроса) служит коммутатор, позволяющий соединять выходы распределительного регистра в любом порядке со входами матрицы маршрутов.
дения (по числу предполагаемых маршрутов), на входы каждой из которых подаются, вопервых, импульс с распределительного регистра 1, соответствующий данному маршруту, во-вторых, информация о незанятости всех участков пути, составляющих этот маршрут. На выходе каждой схемы совпадения появляется импульс с распределительного регистра только в том случае, если возможно движение состава по маршруту, соответствующему данному импульсу (т. е. все участки пути, входящие в данный маршрут, свободны).
Таким образом, на выходе матрицы маршрутов возникает последовательность импульсов с распределительного регистра, расположенных в порядке увеличения времени пробега составов, соответствующих тем маршрутам, движение по которым в данный момент времени возможно.
С выходов матрицы маршрутов импульсы подаются на матрицу поиска адреса 7 и индикаторы 8 рекомендации маршрутов. Па матрице поиска адреса эти импульсы распределяются по горизонтальным и вертикальным шинам, соответствующИ М начальным и конечиым точкам маршрутов, т. е. каждый импульс, соответствующий какому-то вполне определенно.му марщруту, подается одновременно на вертикальную и горизонтальную шины, соответствующие начальным и конечным точкам этого маршрута.
Вертикальные шины матрицы поиска адреса соединены с приемными логическими элементами 9 для составов, а горизонтальные шины - с приемными логическими элементами 10 возможных пунктов их назначения (экскаваторов, отвалов, бункеров и т. и.).
В ириемные логические элементы для составов вводится следующая информация 11:
а)местоположение состава (например, номер разъезда);
б)качество горной массы в думпкарах (руда, порода, порожний);
в)ориентировка (например, электровозом
на Север, думпкарами на Север).
В приемных логических элементах 9 эта информация запоминается и распределяется по схемам совпадения на группы по местоположению, ориентировке и качеству горной массы. Каждая схема совпадения соединяется со своей вертикальной шиной матрицы поиска адреса. Кроме того, в приемные логические элементы для составов на входы схем совпадения с блока изменения алгоритма 12 иодаются сигналы о разрешении погрузки - выгрузки горной массы определенного качества (например, руды или породы).
При еовпадении всех этих сигналов для какого-то состава и наличии импульса на соответствующей вертикальной шине матрицы поиска адреса на выходе 13 приемных логических элементов появляется импульс, который через индикаторы рекомендаций 14 для составов проходит на вход 15 схемы совпадения 16.
Таким образом, на выходе приемных логических элементов для составов возникает последоватс:1ьность импульсов, соответствующих тем маршрутам, движение по которым в данный момент времени возможно (расположенных в порядке увеличения времени пробега составов) и в начальных точках которЕлх имеются составы иеобходимой ориентировки и с горной массой нужного качества.
В приемные логические элементы 10 пунктов назначения вводитея следующая информация 17:
а)местоположение;
б)готовность к работе;
в)качество горной массы;
г)возможный вариант погрузки или выгрузки (иапример, электровозом вперед или думпкарами вперед).
В приемных логических элементах 10 эта информация запоминается и распределяется по с.хемам совпадения на группы по местоположению, качеству горной массы и вариантам погрузки и разгрузки. Каждая схема совпадеиия соединена с определенной горизонтальной шиной матрицы поиска адреса. Кроме того, в приемные логические элементы пунктов назначения на в.ходы схем совпадения с блока 12 изменения алгоритма подаются сигналы о разрешен1 и погрузки - выгрузки гориой массы оп)еделенного качества.
При совпадении всех этих сигналов для какого-то пункта назначения и наличии импульса на соответствующей горизонтальной шине матрицы поиска адреса на выходе 18 приемных логических элементов пунктов назначения появляется импульс, который через индикаторы 19 рекомендаций для пунктов назначения проходит на вход 20 схемы совпадения 16.
Таким образом, на выходе приемных логических элементов пунктов назначения возникает последовательность импульсов, соответствующих тем маршрутам, движение по которым в даиный момент времени возможно (расположенных в порядке увеличеиня времени пробега составов) и в конечных точках которых имеются свободный экскаватор, отвал или бункер, и т. п. с горной массой нужного качества и необходимым вариантом погрузки и разгрузки.
Для поддержания заданного соотношения горной массы (иапример, руды и породы) служат схемы учета и сравнеиия рудных составов, блок изменения алгоритма и переключатель режимов работы.
С нриемиых логических элемеитов для составов и пунктов их назначения в схему учета 21 поступает информация об имеющемся на карьере количестве составов с рудой. Эта пнформация в виде двоичного числа с выхода схемы учета подается на схему сравнения 22. Сюда же вводятся начальные условия о заданном количестве составов с рудой. данному или больше него с выхода схемы сравнения 22 подается сигнал в блок изменения алгоритма 12. Кроме того, в этот блок через переключатель 23 с выходов 24 и 25 распределительного регистра в зависимости от положения этого переключателя подаются управляющие импульсы. Переключатель 23 служит для зада-ния режимов работы устройства (параллельный или последовательный опрос). При параллельном опросе через переключатель проходят импульсы с выхода 24 распределительного регистра. Частота следования этих импульсов равна удвоенной частОТе импульсов продвижения распределительного регистра. При последовательном опросе через переключатель проходят импульсы с выхода 25 распределительного регистра. Частота этих импульсов равна частоте следования циклов распределительного регистра. При отсутствии на входе блока изменения алгорит.ма 12 сигнала со схемы сравнения 22 с выходов этого блока на приемные логические элементы 9 для составов и 10 для пунктав назначения подаются сигналы о разрешении погрузки сначала руды, а затем - породы. При наличии сигнала на входе блока 12 со схемы сравнения очередность подачи сигналов а разрешении погрузки руды и породы меняется на обратную. Частота иереключения сигналов разрешения погрузки руды или породы определяется частотой управляющих импульсов, поступающих на вход блока 12 с переключателя 23. При параллельном опросе сигналы разреше- 35 ния погрузки руды или породы переключаются дважды с каждым импульсом распределительного регистра (т. е. для каждого маршрута рассматриваются рудный и породный варианты), а при последовательном опросе- 40 один раз за каждый цикл работы распределительного регистра (т. е. сначала рассматриваются рудные варианты для всех маршрутов, а затем породные или наоборот). Таким образом, при работе распредели- 45 тельного регистра на входах 15 и 20 схемы совпадения 16 возникают две последовательиости импульсов, соответствующих свободным маршрутам (расположенным в порядке увеличения времени пробега составов), при- 50 чем на входе 15 импульс появляется только при наличии в пункте отправления состава с требуемыми для данного варианта посылки ориентировкой и качеством горной массы в думпкарах, а на входе 20 - при наличии в 55 пункте назначения свободного экскаватора, отвала, бункера и т. п. с горной массой тре30буемого качества и .вариантом погрузки (разгрузки). При совпадении по времени импульсов на входах 15 и 20 схемы совпадения 16 с выхода этой схемы подается импульс на вход блока 3 управления регистром. Подача продвигающих импульсов с блока 3 на вход 2 распределительного регистра I прекращается. Распределительный регистр на данном шаге опроса останавливается и через индикаторы рекомендаций 8, 14 и 19 выдается решение о выборе оптимального маршрута и адреса посылки состава. Устройство работает циклически, т. е. через определенное время блок 3 управления регистром приводит схему -в начальное состояние, и цикл решения повторяется. При выполнении выданного решения (отправления состава по указанному маршруту), вводимая в приемные логические элемеиты информация изменяется, и происходит поиск следуюи.1;его решения. Описываемое устройство может найти применение для оперативного управления горнотранспортными работами на карьерах. Предмет изобретения Устройство для управления горнотранспортными работами на карьере, содержащее матрицу маршрутов, матрицу поиска адресов, логические элементы, распределитель, коммутатор, схему учета, схему сравпеиия, схему «И, индикаторы и блок управления. отличающееся тем, что, с целью осуществления оптимального управления работами, оно содержит блок изменения алгоритма, первый выход которого подсоединен ко входу логического элемента пунктов назначения, а второй выход - ко входу логического элемента составов, вторые входы логических элементов пунктов назначения и составов соединены с горизонтальными и вертикальными шинами матрицы цоиска адреса, входы которой подключены через матрицу маршрутов к выходам коммутатора, входы коммутатора соединеиы с выходами распределителя, подключенного к выходам блока управления, вход которого через схему «И и индикаторы подсоединеи к выходам логических элементов пунктов назначения и составов, вторые выходы логических элементов пунктов назначения и составов соединены через схему учета и схему сравнения с одним входом блока изменения алгоритма, другой вход которого через нереключатель режима работы связан с выходами распределителя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортными средствами | 1978 |
|
SU734727A1 |
| Устройство для управления подвижными и рассредоточенными объектами на карьере | 1973 |
|
SU485457A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Устройство для управления распределением задач | 1977 |
|
SU696471A1 |
| Система для управления экскаваторно-автомобильным комплексом | 1989 |
|
SU1647598A1 |
| Адаптивная система контроля временных интервалов транспортировки слитков и равномерности загрузки нагревательных колодцев | 1987 |
|
SU1453141A1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРАЛИЗОВАННОГО| | 1972 |
|
SU326582A1 |
| Ассоциативное запоминающее устройство | 1976 |
|
SU731474A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| УСТРОЙСТВО для КОНТРОЛЯ ОПЕРАТИВНЫХ НАКОПИТЕЛЕЙ | 1972 |
|
SU341087A1 |