1
Изобретение относится к технике автоматического управления, может быть использовано в позиционных системах программного управления для транспортирования объекта управления в определенной последовательности от одной рабочей позиции па технологической линии к другой.
Известны устройства для автоматического выбора направления перемещения объекта, содержащие две группы последовательно соединенных п схем разделения, переключатель с п контактами, два формирователя сигналов перемещения и п датчиков местонахождения объекта.
Цель изобретения - повыщение надежности устройства.
Предлагаемое устройство отличается тем, что в него введено 2 я резисторов, каждый из которых подсоединен ко входу схем разделения, причем каждый контакт переключателя через цепочку из параллельно соединенных резистора и схемы разделения первой группы и резистора и схемы разделения второй группы подсоединен ко входу датчика местонахождения, а каждая из групп схем разделения подсоединена ко входу формирователя сигналов перемещения.
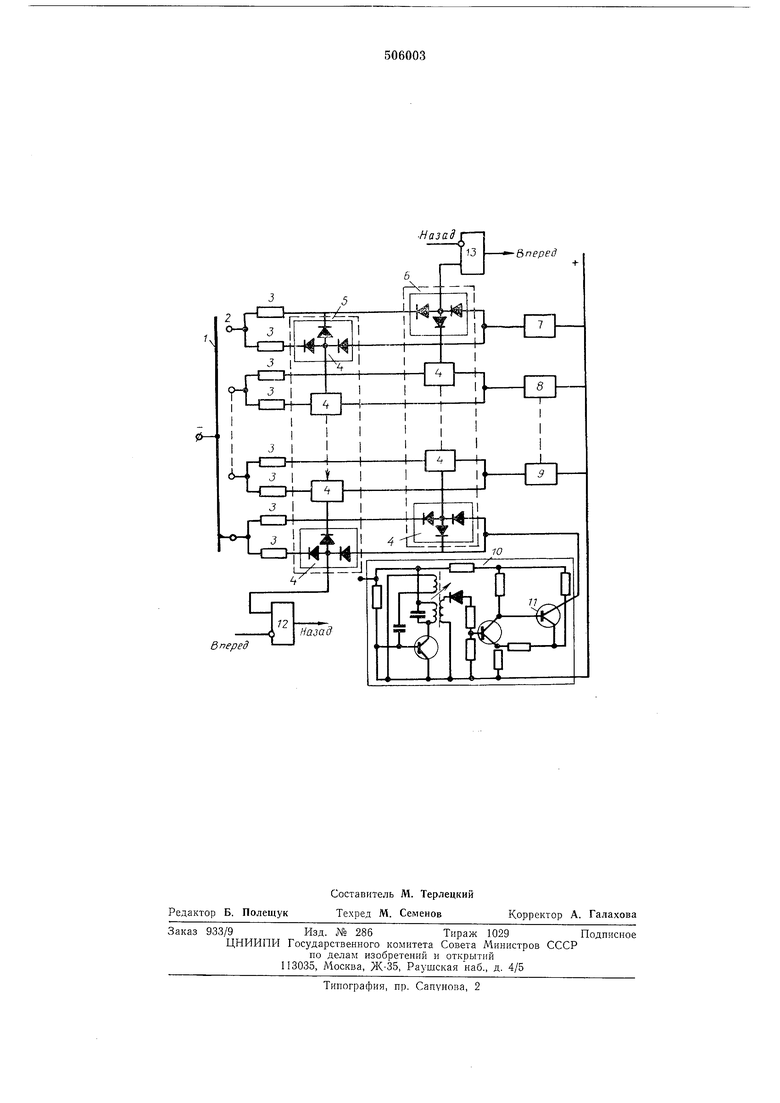
На чертеже представлена принципиальная схема устройства.
Переключатель пунктов следования 1 с контактами через резисторы 3 соединяется со входами двух схем разделения 4, образующих две группы последовательно соединенных п схем разделения 5 и 6. Выходы схем разделения обеих групп попарно подключены к соответствующим датчикам местонахождения объекта 7-10, у которых различают два рабочих состояния. Нормальное состояние датчика - это закрытый выходной транзистор 11. При воздействии объекта на датчик транзистор 11 открывается. Выход каждой из групп схем разделения 5 и 6 подключен ко входу соответствующего формирователя сигналов направления перемещения «Вперед и «Назад 12, 13.
Устройство работает следующим образом.
Предположим, что подвижный объект находится на рабочей позиции в начале линии и воздействует на датчик 7. Переключатель пунктов следования 1 находится в положении, которое соответствует вызову объекта па рабочую позицию в конце линии, т. е. на датчик 10. В этом случае командный сигнал отрицательной полярности через резисторы 3, служащие для преобразования токового сигнала в потенциальный, поступает от переключателя пунктов следования 1 на входы двух схем разделения 4 обеих групп схем разделения 5, 6,
а затем с выхода группы 6 - па вход формирователя 13. На вход формирователя 12 сигнал не поступает, так как в данном случае выход группы 5 зашунтирован открытым транзистором 11 датчика местонахождения 7. Наличие командного сигнала на входе формирователя 13 и отсутствие сигнала «Вперед является необходимым и достаточным условием для появления на выходе формирователя 13 сигнала «Назад.
Объект, съезжая с позиции, на которой он находился, и двигаясь «Назад, перестает воздействовать на датчик 7, вследствие чего выходной транзистор 11 последнего закрывается. Теперь командный сигнал поступает и на вход формирователя 12, но, так как на выходе формирователя 13 есть сигнал «Назад, который одновременно является запрещающим сигналом для формирователя 12, сигнал «Вперед не появляется.
При приходе объекта на запрограммированную позицию, которой соответствует датчик 10, выходной транзистор 11 последнего открывается. Командный сигнал от переключателя пунктов следования I продолжает поступать на обе группы схем разделения, но, так как их выходы зашунтированы открытым транзистором 11, на входы формирователей 12
и 13 сигнал не поступает. Движение объекта прекращается.
При движении объекта в направлении «Вперед от датчика с большим порядковым номером к датчику с меньшим порядковым номером работа схемы аналогична, только в этом случае на выходе формирователя 12 оказывается сигнал «Вперед.
Формула изобретении
Устройство для автоматического выбора направления перемещения объекта, содержащее две группы последовательно соединенных п
схем разделения, переключатель с п контактами, два формирователя сигналов перемещения и п датчиков местонахождения объекта, отличающееся тем, что, с целью повышения его надежности, в него введено 2 п
резисторов, каждый из которых подсоединен ко входу схем разделения, причем каждый контакт переключателя через цепочку из параллельно соединенных резистора и схемы разделения первой группы и резистора и схемы разделения второй группы подсоединен ко входу датчика местонахождения, а каждая из групп схем разделения подсоединена ко входу формирователя сигналов перемещения.
0-4
6 перед
Назад
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ОБЪЕКТА | 1968 |
|
SU209067A1 |
| Устройство для автоматического выбора направления движения объекта | 1977 |
|
SU722828A1 |
| Устройство для автоматического выбора направления движения объекта | 1990 |
|
SU1765082A1 |
| Устройство для контроля функционирования логических блоков | 1986 |
|
SU1327107A1 |
| Устройство для программного управ-лЕНия пЕРЕМЕщЕНиЕМ иСпОлНиТЕльНОгОэлЕМЕНТА | 1979 |
|
SU840806A1 |
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
| Устройство для позиционного управления приводом перемещения объекта | 1975 |
|
SU570882A1 |
| Дискретный датчик перемещения | 1980 |
|
SU890252A2 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для автоматического выбора направления движения объекта | 1980 |
|
SU900551A1 |