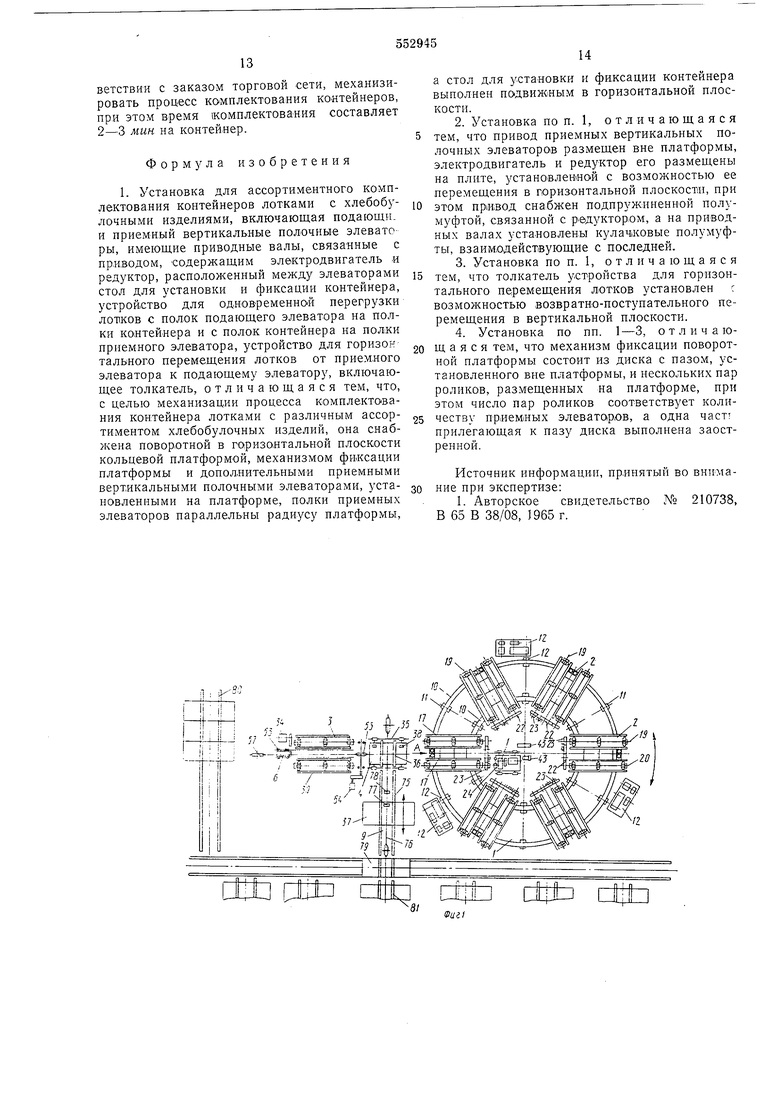
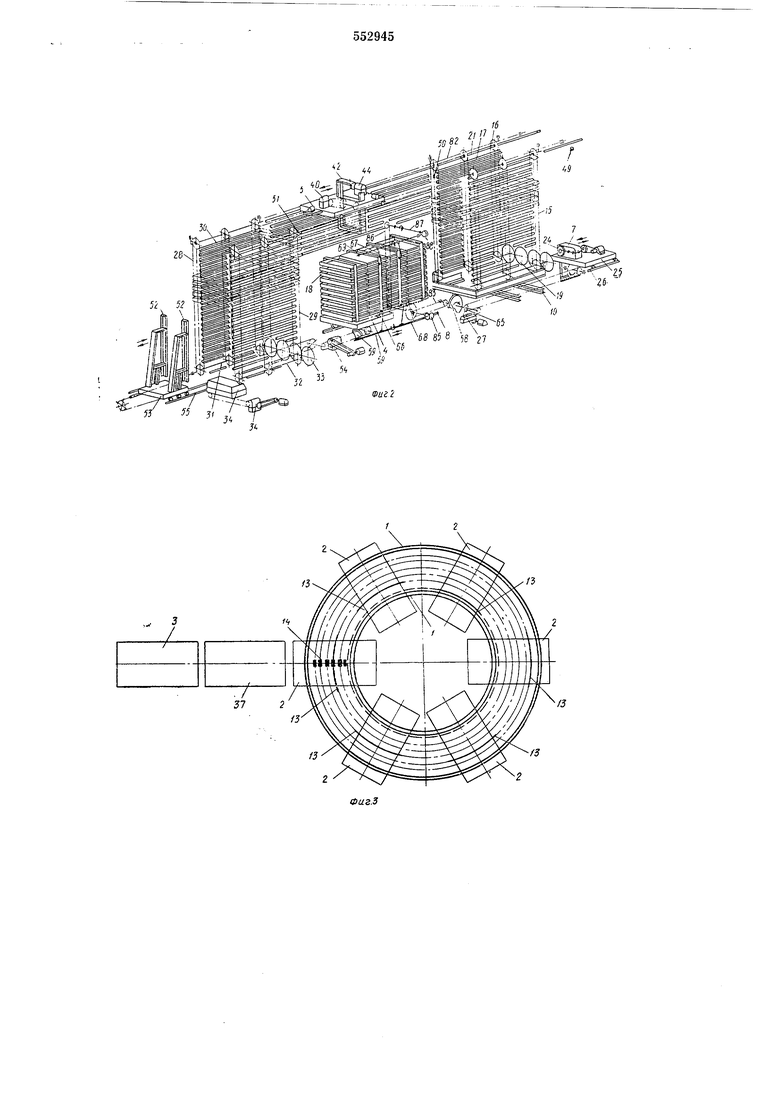
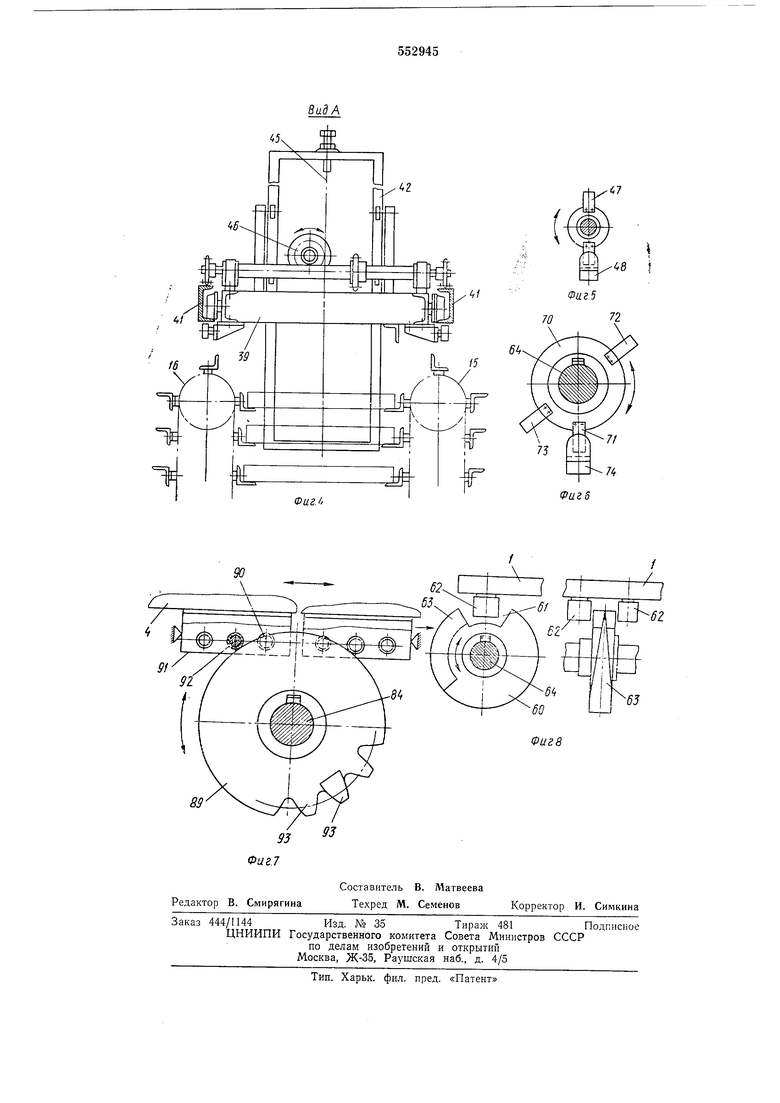
муфты, взаимодействующие с подпружиненной полумуфтой. Электродвигатель и редуктор привода размещены на плите, установленной с возможностью перемещения в горизонтальной плоскости. Толкатель устройства для горизонтального перемещения лотков смонтирован с возможностью возвратно-поступательного перемещения в вертикальной плоскости. При этом механизм фиксации платформы состоит из диска, установленного вне платформы, и нескольких пар роликов, размещенных на платформе, число которых соответствует количеству приемных элеваторов. В диске имеется паз, а одна из прилегающих к пазу частей диска выполнена заостренной. На фиг. 1 изображена предлагаемая установка, вид в плане; на фиг. 2 - ее кинематическая схема; на фиг. 3 - датчики и копиры, определяющие угол поворота платформы; на фиг. 4 - вид Л фиг. 1 (устройство горизонтального перемещения лотков); на фиг. 5 - схема расположения лепестков импульсов вертикального перемещения толкателя лотков; на фиг. 6 - схема расположения лепестков импульсов механизма фиксации платформы; иа фиг. 7 - щтанга и диск для перемещения 1стола с контейнером; на фиг. 8 - механизм фиксации платформы, две проекции. Установка состоит из поворотной платформы 1 с расположенными по ее окружности приемными вертикальными полочными элеваторами 2; подающего вертикального нолочного элеватора 3, смонтированного стационарно; подвижного стола 4 для установки и фиксации контейнера; устройства 5 для горизонтального перемещения лотков от приемного элеватора 2 к подающему 3; устройства 6 для одиоеремеиной перегрузки лотков с полок подающего элеватора 3 на полки ко.нтейнера и с полок контейнера на полки приемного элеватора 2; привода 7 приемных элеваторов 2; устройства 8 для точной установки и фиксации поворотиой платформы / контейнера; цепного конвейера 9 для подачи контейнеров на стол 4 приема укомплектованных контей«е1ров и системы управления установки (на чертежах не показана). Поворотная платформа / служит для поочередной подачи к месту комплектования приемных элеваторов 2. Платформа образована рамой 10, опирающейся на равномерно расположенные по окружности ролйки и с ребордами, и снабжена фрикционными приводами 12 для сообщения ей вращения в горизонтальной плоскости. Для определения угла поворота платформы / с приемными элеваторами 2 установка снабжена копирами 13 и датчиками 14. Копиры 13 прикреплены к платформе со смещением в радиальном направлении, а их количество соответствует числу элеваторов 2. Датчики -14 стационарно расположены на траектории оК|ружности каждого копира под платф.ормой 1 и на одной прямой, проходящей через центр вращения платформы /. Угловой щаг между копирами 13 равен угловому ш,агу между приемными элеваторами 2, которые для приема и накапливания лотков с хлебобзлочными изделиями. Полки приемных элеваторов параллельны радиусу платформы, а число приемных элеваторов 2 соответствует числу видов хлебобулочных изделий. При этом емкость элеватора должна быть, по крайней мере, равна двух|кратной емкости контейнера. Каждый элеватор 2 образован двумя цепными конвейерами 15 и 16 с полками 17 для установки лотков 18 с хлебобулочными изделиями. Конвейеры 15 и 16 имеют соответственно приводные 19 Е 20 и натяжные 21 валы. Приводные валы 19 и 20 соедииены между собой зубчатой .передачей 22 с возможностью вращения их в противоположных направлениях. На приводном валу 19 коивейера 15 каждого приемного элеватора 2 неподвижно закреплена кулачковая полумуфта 23. Для сообщения движения цепным конвейерам 15 и 16 приемных элеваторов 2 установка снабжена размещенными вне платформы 1 приводом 7 с электродвигателем, тормозом и редуктором (на чертежах не показаны). На валу редуктора привода 7 установлена подпружиненная полумуфта 24, периодически входящая в зацепление с полумуфтой 23. Привод 7 размещен на плите 25, установленной с возможностью возвратно-поступательного перемещения в горизонтальной плоскости по направляющим 26 для ввода н вывода кулачковой полумуфты 24 из зацепления с полумуфтой 23. Перемещение плиты осуществляется от привода 27 устройства 8. Подающий элеватор 3 предназначен для приема и комплектования партии лотков с различными видами хлебобулочных изделий. Элеватор 3 состоит из двух цепных конвейеров 28 и 29 с полками 30 для установки заполненных лотков 18. Приводные валы 31 и 32 соответствующих цепных конвейеров 28 и 29 соединены между собой зубчатой передачей 33 и получают вращение в противоположных направлениях от привода 34 с щаговым механизмом (на чертежах не показан). Стол 4 для установки и фиксации контейнера установлен между приемным и подающим элеваторами 2 и 3 с возможностью возвратно-поступательного перемещения в горизонтальной плоскости по направляющим 35. На столе 4 закреплены направляющие 36 для колес контейнера 37 и датчик (не показан), связанный с системой управления установки и сигнализирующий о наличии контейнера на направляющих 36 стола 4. Для поджатия контейнера 37 в момент переталкивания лотков на столе 4 закреплены подпружиненные упоры 38. Стол 4 получает дв:ижен1ие от привода 27 устройства 8. Устройство 5 для горизонтального перемещеипя лотков от приемного элеватора 2 к подающему элеватору 3 состоит из каретки 39 с устаноеленными на ней приводом 40 для сообщения возвратно-поступательного перемещения по направляющим 41 и толкателя 42. Направляющие 41 размещены над элеваторами 2 и 5 с зазором для свободного перемещения каретки 39. Один конец направляющих 41 размещен на элеваторе 3, второй - на стойках 43, устаповлепных внутри платформы /. Толкатель 42 установлен на каретке 39 с возможностью возвратно-поступательного перемещения в вертикальной плоскости от привода 44. Толкатель 42 выполнен в виде рамы, внутри которой натянута цепь 45, входящая в зацепление со звездоч1кой 46, установленной на валу редуктора (не показап) привода 44. Кроме того, на валу редуктора привода 44 установлены два алюминиевых лепестка 47, последовательно взаимодействующие с бесконтактным концевым выключателем 48. Приводы 40 и 44, а также выключатель 48 Связаны с системой управления установки. На пути перемещения устройства 5 расположены три бесконтактных концевых выключателя 49, 50 и 51, а на каретке 39 - лепесток (не показан), взаимодействующий с выключателями. Устройство 6 выполнено в виде толкателя 52, закрепленного на каретке 53, установленной с возможностью возвратно-поступательного перемещения от привода 54 по направляющим 55, последние ра,сположены между цепными конвейерами 28 и 29 элеватора 3. Крайние положения устройства определяются датчиками 56 и 57. Привод 54 и датчики 56 и 57 связаны с системой управления установки. Устройство 8 состоит из механизма 55 фиксации платфор.мы и механизма 59 для установки и фиксации контейнера 37 в момент переталкивания лотков 18 с полок элеватора L на полки контейнера 37. Механизм 58 состоит из поворотного диска 60 с пазом 61 и роликов 62, взаимодействующими с ним в момент фиксации платформы /. Ролики 62 попарно размещены на нижней поверхности платформы. Число пар роликов соответствует количеству приемпых элеваторов 2, а шаг между ними - шагу между элеваторами. При этом прилегающая к пазу часть 63 диска 60 выполнена заостренной. Диск 60 расположен под платформой / н.а валу 64, установленном с возможностью качания от привода 27 устройства 8. Привод 27, состоящий из двигателя, тормоза, редуктора (на чертежах не показаны), цепной передачей 65 связан с валом 64 устройства 8. Механизм 59 образован системой рычагов 66 и 67, служащих для фиксации нижней и верхней контейнера на столе 4 в момент переталкивания лотков. Рычаги 66 и 67 попарно закреплены с возможностью поворота в разные стороны на валах 68 и 69. На валу 64, кроме диска 60, закреплен диск 70 с тремя алюминиевыми лепестками 71, 72, 73, взаимодействующими с бесконтактным концевым выключателем 74. Цепной конвейер 9 для подачи контейнеров 37 из хлебохранилища на стол 4 и приема у комплектованных контейнеров состоит из направляющих 75 и цепи 76 с двумя толкателями 77 и 78 для накатывания контейнера на стол 4, скатывания его со стола и установки в зоне действия механизма загрузки траверсной тележки 79. Последняя служит для установки контейнера 37 на направляющие 75. На цепи 76 закреплен копир, взаимодействующий с двумя датчиками (на чертежах не показаны). Описываемая установка располагается в экспедиции в зоне размещения загрузочных конвейеров 80. Для размещения контейнеров с хлебом в хлебохранилище смонтированы реверсивные накопители 81 по числу видов хлебобулочных изделий. В позиции перегрузки лотков над столом 4 между элеваторами 2 и 5 размещены направляющие 82. Установка работает следующим образом. Перед пуском установки на полки 17 конвейеров 15 и 16 элеваторов 2 устанавливают без пропусков лотки 18 с хлебобулочными изделиями. При этом в каждом элеваторе 2 размещают ЛОТ1КИ только с одним видом изделий. На каждой полке устанавливают одновременно столько лотков, сколько их размещается в одном ряду контейнера. Первый ряд лотков располагается в крайнем верхнем ряду. Установка автоматически производит комплектовку контейнера видами изделий, входящих в заказ торговой сети за исключением одного вида изделий, принятого за базовый, который уже находится в контейнере. За базовый вид изделий принимается такой, которого в данном заказе больще. Например в соответств 1и с программой контейнер с 10 полками должен быть загружен: Батонами I сорта4 полки Батонами высщего сорта2 полки Городской булкой2 полки Плетенкой высщего сорта1 полка Выборгской сдобой 1 полка. Контейнер 37, заполненный лотками с базовым видом хлебобулочных изделий, например батонами I сорта, по сигналу с установки тележкой 79 транспортируется из хлебохранилища с накопителя 81 на направляющие 75 конвейера 9. Далее толкателем 77 контейнер перемещается до установки на напр.авляющие 36 .стола 4.
Из базового контейнера необходимо выгрззить шесть рядов батонов I сорта и на их место загрузить остальные виды хлебобулочных изделий согласно заказу. Одновременно с транспортировкой :контейнера из хлебохранилища на стол 4 проводят комплектование соответствующих видов изделий из элеваторов 2 в элеватор 3.
Комплектование осуществляют в следующей последовательности.
При повороте платформы / в положение перегрузки подается наиболее близкий элеватор 2 с одним из видов изделий, подлежащих комплектованию, например элеватор с городской булкой. Устройство 5 к моменту начала перегрузки должно быть расположено в исходном положении над центральной частью платформы 1.
Толкатель 42 опускается из крайнего верхнего положен-ия на соответствующее число полок с лотками элеватора 2, подлежащих перегрузке в элеватор 3, например на два паза. Толкатель может одновременно перемещать до восьми рядов.
После остановки -и фиксации платформы толкатель 42 при движении каретки 39 по направляющим 41 перемещает два ряда лотков 18 с полок элеватора 2 сначала на направляющие 82, а затем на полки 30 элеватора 3. При этом в каждом ряду перемещается четыре лот1ка. При этом толкатель 42 упирается в торец последнего лотка.
После загрузки лотков на полки элеватора 3 каретка 39, в результате взаимодействия лепестка с концевым выключателем 51, возвращается в исходное положение. Одновременно с движением каретки толкатель 42 поднимается в «сходное положение, в котором он устанавливается до момента прохождения каретки над платформой.
ПоСле завершения переталкивания двух рядов лотков на лолки 30 элеватора 3 включается привод 34, опускающий полки цепных конвейеров 28 и 29 на расстояние, равное числу рядов следующего вида изделия, комплектующего данный контейнер.
После каждой перегрузки лотков полки соответствующего элеватора 2 поднимаются, а ПОЛ1КИ элеватора 3 опускаются на необходимую высоту.
Процесс перегрузки лотков с последующими видами изделий из элеватора 2 в элеватор 3 осуществляется аналогично выщеописанному.
После создания в элеваторе 3 комплекта четырех видов хлебобулочных изделий (лотки с базовым видом .изделий находятся в контейнере) его перегружают в контейнер, а из контейнера перегружаются лотки с базовым видом в соответствующий элеватор 2, содержащий базовый вид изделий. Для этого платформа / автоматически поворачивается
до момента установки в положение перепрузки элеватора 2 с базовым видом изделий.
В каждом элеваторе 2 может находиться различное количество лотков с изделиями: Ч:исло рядов лотков с изделиями равно или больще рядов в контейнере; число рядов лотков с изделиями меньше рядов в контейнере. Соответственно возможны следующие два положения комплекта лотков в элеваторе 2.
В первом случае лотки остаются в исходном положении, а комплект лотков с изделиями в элеваторе 3 автоматически опускается до положения, при котором верхний ряд с, изделиями устанавливается последнего
ряда лотков в элеваторе 2.
Стол 4 с контейнером 37 перемещается в крайнее правое положение до соприкосновения лотков элеватора 2 с лотками контейнера.
При включении привода 54 устройства 6 каретка 53 перемещается между конвейерами 28 и 29, и толкатель 52 перемещает комплект лотков с хлебобулочными изделиями из элеватора 3 на полки контейнера 37, которые, в
свою очередь, выталкивают лотки с базовым видом хлебобулочных изделий из полок контейнера на пустые полки элеватора 2 для базового вида изделий.
После окончания переталкивания лотков
устройство 6, а также стол 4 с укомплектованным контейнером заданным ассортиментом хлебобулочных изделий возвращаются в исходное положение.
Затем конвейер 9 толкателя 78 перемещает контейнер 37 по направляющим 75 на исходную позицию и при помощи тележки 79 подаются на конвейер 80 для комплектования партии контейнеров для погрузки в автохлебовоз.
После этого на установку подается следующий базовый (Контейнер 37 для доукомплектовки хлебобулочными изделиями согласно заказу на данный контейнер.
Во втором случае лотки с изделиями в
элеваторе 2 с базовым видом изделий опускаются автоматически, пока нижний ряд последних не окажется на один ряд выше верхнего ряда лотков с изделиями в контейнере 37.
Лотки в элеваторе 5 автоматически опускаются, лока верхний ряд лотков не окажется на уровне верхнего ряда лотков в .контейнере.
Перегрузка лотков из элеватора 3 в контейнер 37 и .из контейнера в базовый элеватор 2, а также связанные с этим перемещения механизмов происходят так, как в первом случае. После этого лотки с изделиями в базовом элеваторе 2 устанавливаются в крайнее BepXiHee положение.
Система управления установки обеспечивает автоматический учет количества лотков с изделиями в каждом из элеваторов 2. Работа приводов механизма установки
осуществляется следующим образом. Системой управления установки определяется: базовый вид изделия данного заказа; необходимая высота опускания толкателя 42 устройства 5; оптимальная последовательность подачи элеваторов 2 с соответствующим видом изделий на позицию перегрузки лотков; количество рядов, на которые должны опускаться - подниматься полки с изделиями в элеваторе 2; количество рядов полок, подлежащих опусканию в элеваторе 3. Системой управления подается сигнал в схему управления траверсной тележки 79 для транспортировки базового контейнера 37 из хлебохранилища на направляющ1ие 75 цепного конвейера 9, фр(икционный привод 12 и соответствующий датчик 14. Платформа / поворачивается до взаимодействия соответствующего копира 13 с упомянутым датчиком, после чего приводы 12 отключаются, платформа / останавливается, включается привод 27, вращение от которого передается через цепную передачу 65 на вал 64. При повороте диска 60 его клиновидная часть 63 входит между роли1Ка,ми 62, в результате чего платформа / поворачивается до точной установки соответствующего элеватора 2 в позицию перегрузки лотков 18. Диск 60, продолжая вращаться, обеспечивает фиксацию платформы. Одновременно с началом вращения вала 64 начинает перемещаться плита 25 с приводом 7 до момента взаимодействия кулачковых полумуфт 23 и подпружиненной полумуфты 24 привода 7 и элеватора 2, после чего плита 25 останавливается. Одновременно с подачей сигнала в схему управления фрикционного привода 12 платформы поступает сигнал в схему управления привода 44 устройства 5. Вращение от привода 44 передается на звездочку 46, которая опускает цепь 5 и вместе с ней толкатель 42. Лепесток 47, вращаясь вместе со звездочкой 46, при полуобороте последней проходит через паз выключателя 48, что является сигналом опускания на высоту полок 17 элеватора 2, поступающим в систему управления. Системой управления привод 44 отключается. Сигнал отключения привода 44 поступает в схему управления приводом 40 устройства 5, передается на вал со звездочками 46, перемещающим каретку 39 по нанравляющим 41. При этом толкатель 42 перемещает заданное число рядов лотков /5 с хлебобулочными изделиями из элеватора 2 в элеватор 3 до момента входа лепестка в паз выключателя 51. Это положение соответствует окончательному переталкиванию лотков 18 на полки 30 элеватора 3. Сигнал от выключателя поступает в систему управления и далее в схему управления приводов 40 и 44. Привод 40, реверсируясь, перемещает каретку 39 в исходное положение, а привод 44, реверсируясь, перемещает толкатель 42 в верхнее крайнее положение. Перемещение толкателя осуществляется О момента взаимодействия лепестка с выключателем 50 (подъем толкателя 42 должен произойти до момента входа толкателя в зону латформы /). При перемещении толкателем 42 лотков 18 в сторону элеватора 3 в момент, когда лотки располагаются на направляющих 82 (лепесток входит в паз выключателя 56), подается сигнал на включение привода 7. Последний через ранее соединенные полумуфты 23 и 24 приводит во вращение щестеренчаую передачу 22 и приводные валы 19 и 20 цепных конвейеров 15 и 16 элеватора 2, который находится в позиции перегрузки. Лотки с изделиями, установленные между цепными конвейерами на полки последних, перемещаются вверх. При повороте валов 19 и 20 на одну четверть оборота лепесток проходит через паз выключателя, сигнал от которого поступает в систему управления и означает подъем лотков на один ряд. После подъема лотков на количество рядов, с iKOTopbix толкателем 42 устройства 5 были передвинуты лотки (в элеваторе 2), системой управления отключается привод 7 и включается привод 27, в результате чего устройство 5 перемещается в исходное положение. Возвращение диска 60 в исходное положение (паз 61 диска 60 пропускает ролики 62 при вращении платформы) совпадает с входом лепестка 71 в паз выключателя 74, сигпал от которого подается в систему управления, а оттуда в схемы управления приводов 12, 27 и 34 и соответствующий датчик 14. Привод 27 отключается. Фрикционные приводы 12 платформы / включаются для подачи элеватора 2 со следующим, заданным программой, видом изделий на позицию перегрузки, которая осуществляется выщеописанным образом. Вращение от привода 34 передается валу 32 и через щестеренчатую передачу 33 валу 31, в результате чего лотки 18 с изделиями, поступивщими из элеватора 2, опускаются. После опускания лотков на количество рядов, соответствующих количеству рядов следующего вида изделия, подлежащего перегрузке из элеватора 2 в элеватор 3, система управления отключает привод 34. Далее устройством 5 следующая партия лотков переталкивается в элеватор 3, и снова происходит опускание рядов лотков 18. При переталкивании последней партии лотков в элеватор 3 устройством 5, после получения сигнала от концевого выключателя 50 (выход толкателя 12 устройства 5 из зоны вращения платформы), подается сигнал на соответствующий путевой выключатель 14 и в схему управления фрикционного привода 12 на подачу элеватора 2 с базовым видом изделия на позицию перегрузки, а при взаимодействии лепестка с выключателем 5 в схему управления приводом 34 - для опускания комплекта лотков 18 в элеваторе 3 на заданное число рядов, которое определяется си11стемой управления и соответствует усталовке верхнего ряда лотков комплекта, размещенного в элеваторе 5, на один ряд нил него ряда лотков в элеваторе 2. После подачи элеватора 2 (при повороте платформы /) с базовым видо-м изделий на позицию перегрузки копир 13 взаимодействует с соответствующим датчиком 14, сигнал от которого поступает в систему управления и далее в схему управления приводами 12. Привод 12 отключается, в результате чего платформа останавливается. При перемещении контейнера 37 механизмом перегрузки траверсной тележки 79 на направляющие 75 цепного конвейера 9 срабатывает выключатель, сигнал от которого поступает Б схему зправления привода цепного конвейера 9. Толкателем 77 цепного конвейера 9 (Контейнер 37 перемещается по упомянутым направляющим, а затем накатывается на направляющие 36 до подпружиненного упора 38 стола 4. При этом выключатель, установленный в зоне цепного конвейера 9, срабатывает от взаимодействия с ним копира, размещенного на цепи (на чертежах не показан). Сигнал от выключателя поступает в схему управления привода цепного конвейера 9, и последний отключается. После поступления контейнера 37 на стол 4 срабатывает выключатель, раЗМещен.ный на столе, сигнал от которого о налич,ии контейнера на столе 4 передается в .систему управления. Система упр.авления при получении сигнала о наличии элеватора с базовым видом изделий в положении перегрузки и сигнала о наличии контейнера на направляющих 36 стола 4 подает сигнал в схему управления на включен ие привода 27. Вал 64, вращаясь, поворачивает диск 60, которым устанавливается и фиксируется платформа 7, после чего пл.ита 25 перемещается до входа в зацепление полумуфт 23 и 24 (аналогично вышеописанному). Вращение от вала 64 передается через цепную передачу 83 на вал 84, откуда через конические шестерни 85 - на вал 68, а через цепную передачу 86 - на вал 87 ц от него через конические щестерни 88 - на вал 69. После ввода в зацепление полумуфт зубчатый диск 89, установленный на валу входит в зацепление с коротким роликом 90 щтанги 91, соединенной со столом 4, при этом штанга со столом 4 и контейнером 37 перемещается к платформе / до выхода из зацепления роликов 92 с зубьями 93 диска 89. В этом положении штангу 91 удерживает диск 89 и упор. При наличии в элеваторе 2 девяти или меньше лотков (в нашем примере) включается привод 7, оп)ская лотки с изделиями на величину, соответствующую перемещению нижнего ряда лотков на ряд выше верхнего ряда лотков в контейнере (в нашем примере до уровня десятого ряда, считая сверху). При отсчете этого положения привод 7 отключает1284, ся, а привод 27 перемещает стол 4 с контейнером 37 в сторону элеватора 2. Валы 68 и 69, вращаясь, поворачивают рычаги 66 и 67 до соприкосновения с контейнером 37 для фиксации его в момент переталкивания лотков. Исходное пол. рычагов 66 и 67 выбрано таким, что в момент ввода полумуфт в зацепление (.с отключением при этом привода 27 контейнер свободно может быть установлен иа направляющих 36 стола 4, а в крайнее положение рычаги 66 и 67 устанавливаются после окончательной установки стола 4 с контей;нером на позицию заталкивания в него лотков с комплектом изделий. В момент установки рычагов 66 н 67 в крайнее положение лепесток 73 входит в паз выключателя 74. При этом сигнал из системы управления поступает на отключение привода 27 и включение привода 54. Последний перемещает каретку 53 по направляющим 55. Толкатель 52, перемещаясь вместе с кареткой 53, переталкивает комплект лотков с хлебобулочными изделиями в контейнер 37, а лотки последнего с базовым видом хлебобулочных изделий - в элеватор 2. Движение каретки 53 продоллсается до момента взаимодействия ее копира с выключателем, сигнал от которого подается в систему управления, реверсирующую привод 54 и включающую привод 27. При реверсе привода 54 каретка 53 перемещается в исходное положение, которое определяется взаимодействием копира с выключателем. При реверсе привода 27 рычаги 66 и 67, поворачиваясь, ;расфиксируют контейнер 37 и стол 4, и находящийся на нем контейнер 37 уста1навливается в исходное полол ение. Если в элеваторе 2 предварительно лотки опускал1И1СЬ, то в момент ввода лелестка 72 в выключатель отключается привод 27 и включается привод 7 для подъема лотков /8 в элеваторе 2 в верхнее крайнее полол ение. После этого системой управления подается сигнал «а отключение привода 7 и включение привода 27. При этом плита 25 с приводом 7 и ДИСК 60 устанавливаются в исходное полол ение, что соответствует вводу лепестка 7 в паз выключателя 74. При этом системой управления подается сигнал на включение привода цепного конвейера 9, толкателем 7S которого укомплектованный IKOHтейн1ер 37 перемещается с направляющих 36 стола 4 на направляющие 73 конвейера 9, откуда траверсной тележкой 79 перемещается на позицию накопления партии контейнеров для. последующей загрузки в автохлебовоз. Предлагаемая установка производит комплектование следующего контейнера согласно программе на его жоплектование. Для гарантированной работы механизмов установка снабл ена системой блокировки. Использование такой установки позволяет комплектовать контейнер лотками с различными видами изделим в заранее заданном количестве в соот13
ветствии с заказом торговой сети, механизировать процесс комплектования контейнеров, при этом время комплектования составляет 2-3 ж«« на контейнер.
Формула изобретения
1 Установка для ассортиментного комплектования контейнеров лотками с хлебобугючными изделиями, включающая подающн. и приемный вертикальные полочные элевато ры имеющие приводные валы, связанные с приводом, содержащим электродвигатель и р-дуктор расположенный между элеваторами стол для установки и фиксации контейнера, устройство для одновременной перегрузки лошов с полок подающего элеватора на полки контейнера и с полок контейнера на полки приемного элеватора, устройство для горизон тального перемещения лотков от приемного элеватора к подающему элеватору, включающее толкатель, отличающаяся тем, что, с целью механизации процесса комплектования контейнера лотками с различным ассортиментом хлебобулочных изделий, она снабжена поворотной в горизо-нтальной плоскости кольцевой платформой, механизмом фи-ксации платформы и дополнительными приемными вертикальными полочными элеваторами, установленными на платформе, полки приемных элеваторов параллельны радиусу платформы,
552945
14
а стол для зстановки и фиксации контейнера выполнен подвижным в горизонтальной плоскости.
2.Установка по п. 1, отличающаяся тем что привод приемных вертикальных полочных элеваторов размещен вне платформы, электродвигатель и редуктор его размещены на плите, установленной с возможностью ее перемещения в горизонтальной плоскости, при этом привод сна:бжен подпруж:иненной полумуфтой, связанной с редуктором, а на приводнь х валах установлены кулачковые полумуфты, взаимодействующие с последней.
3.Установка по п. 1, отличающаяся тем, что толкатель устройства для горизонтального перемещения лотков установлен с возможностью возвратно-поступательного перемещения в вертикальной плоскости.
4.Установка по пп. 1-3, отличающаяся тем, что механизм фиксации поворотной платформы состоит из диска с пазом, установленного вне платформы, и нескольких пар роликов, размещенных на платформе, при этом число пар роликов соответствует количеству приемных элеваторов, а одна част; прилегающая к пазу диска выполнена заостренной.
Источник информации, принятый во внтгмание при экспертизе:
1. Авторское свидетельство № 210738, В 65 В 38/08, 1965 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| Установка для комплектования лотков и контейнеров хлебобулочными изделиями | 1977 |
|
SU736928A1 |
| Устройство для укладки штучных изделий в пакет | 1988 |
|
SU1643368A1 |
| Устройство для программного управления комплектованием контейнеров | 1975 |
|
SU561937A1 |
| Устройство для комплектации лотков и загрузки их в контейнер | 1972 |
|
SU524752A1 |
| МАГАЗИН БЫСТРОГО ОБСЛУЖИВАНИЯ ПОКУПАТЕЛЕЙ НА АВТОМОБИЛЯХ | 2017 |
|
RU2665991C1 |
| Устройство для укладки в пакет плоских изделий | 1987 |
|
SU1579874A1 |
| Линия для подачи хлебобулочных изделий и их укладки на полки многоярусных контейнеров | 1989 |
|
SU1630746A1 |
| УСТРОЙСТВО для ОХЛАЖДЕНИЯ ПИЩЕВЬГХ ПРОДУКТОВ, или ПОЛУФАБРИКАТОВ | 1966 |
|
SU188517A1 |
| Устройство для загрузки изделий в тару | 1990 |
|
SU1724519A1 |
/3
/
i
Г
./ 57
/5
/5
/3
/г
