Известен двусторонний загружатель для передачи деталей типа «олец с лотка станка автоматической линии на пальцы транспортной цепи, содержащий звездочки для этой цепи и подвижные лотки.
Предложенный загружатель отличается от известного тем, что он снабжен цевочным колесом со звездочкой, число зубьев которой кратно числу звеньев цепи и шагу удлиненных пальцев, в результате чего обеспечивается совпадение удлиненных .пальцев цепи с определенными впадинами на звездочке. На оси колеса установлены две подвижные муфты с кольцевой канавкой и профильным секторным иазом, против которого во втулках расположен иодиружиненный палец с тремя пазами. При этом первый паз связаи с защелкой, соединенной рычагами с кулачком, который служит для определения наличия детали на подвижном (пальце транспортной цепи. Второй паз взаимодействует с выступом, находящимся на рычаге и контактирующим с кольцами в подвижном лотке. Этот выступ обеспечивает наряду с рычагом, пазом подвижной муфты и пальцем одевание колец на пальцы транспортной цепи. Третий паз пальца связан с подвижным фиксатором, который соединен посредством рычага с программирующим кулачком. Программирующий кулачок установлен на звездочке лротив той ее впадины.
к которой подойдет палец для загрузки на не-. го кольца.
Это отличие обеспечивает возможность транспортирования разных колец по заданной
программе.
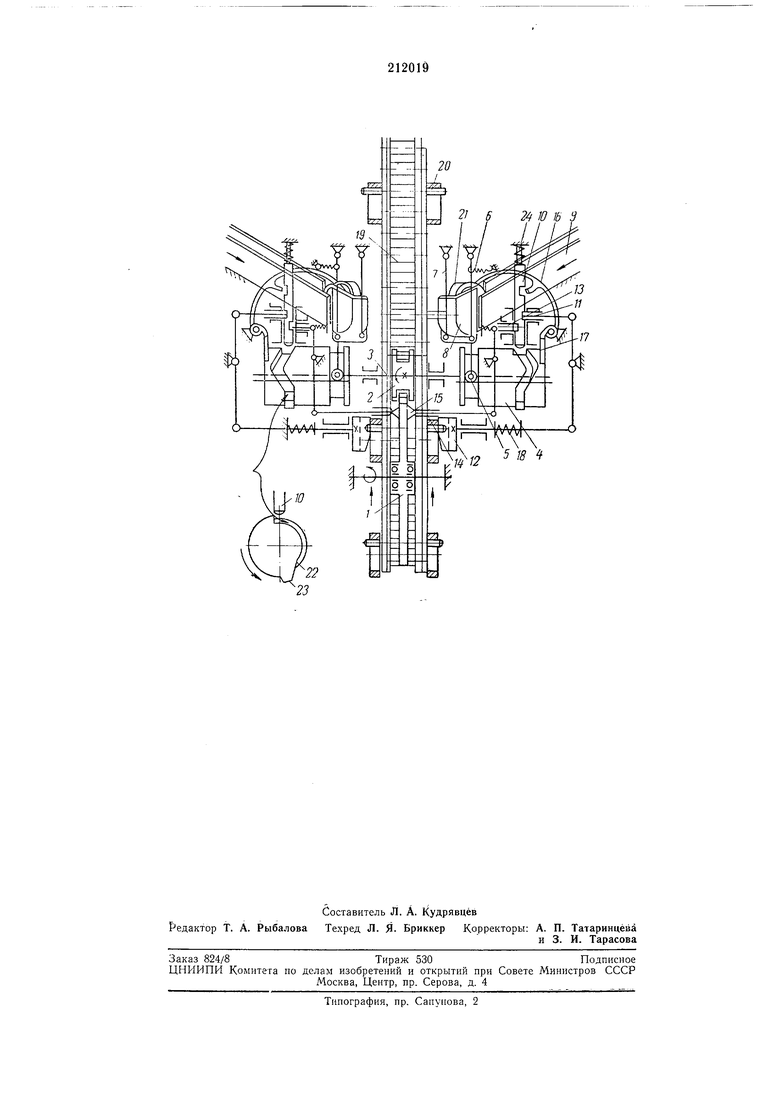
На чертелсе показана схема загружателя. Он содержит звездочку 1, находящуюся в зацеплении с цевочным колесом 2, сидящим на валу 3. На валу 3 с двух сторон установлены скользящие муфты 4. В кольцевую канавку муфты 4 входит ролик 5, расположенный на конце рычага 6. Параллельно рычагу 6 размещен рычаг 7. Одними концами рычаги щарнирно соединены с неподвижной опорой,
а другими связаны с подводным лотком 8, образуя кинематическую цепь. К лотку 8 примыкает неподвижный лоток 9.
Подпружиненный .программный валик 10 имеет несколько контрольных пазов (по количеству признаков программирования), в которые входят фиксаторы: фиксатор //, соединенный системой рычагов с кулачком 12; фиксатор 13, связанный рычагами с упором 14, упирающимся в кулачок 15, закрепленный на
звездочке /; фиксатор 16, выполненный за одно с кривым рычагом.
На краю муфты 4 закреплен плоский кулачок /7, предназначенный для подъема фиксатора 16. На рычаге - оси кулачка 12 устарована втулочно-роликовая цепь 19 с двусторонними внешними пальцами 20, на которых транспортируются кольца 2. Все детали, начиная с четвертой, имеются как с правой, так и левой стороны загружателя.
Принцип работы загружателя звездочка / вращается от движущейся втулочио-роликовой цепи и через цевочное колесо 2 вращает вал 3. На валу установлена муфта 4, которая с одной стороны ил1еет кольцевую канавку, а с другой - профильный секторный паз в виде правой и левой спирали. При условии, что все три фиксатора 6, 13 и // выведены, программный валик 10 под действием пружины 24 входит в секторный паз муфты 4. В момент нахождения валика 10 в пазу муфта 4 совершает осевое перемещение по валу 5 и в ту и в другую сторону. После прохождения профильного паза -программный валик наклонной плоскостью 22 профильного паза выталкивается на заеыщение кулачка 23. В момент нахождения программного валика на завышении кулачка 23 всего три фиксатора входят в прорези программного валика, который занимает исходное положение для совершения следующего цикла.
При осевом перемещении муфты 4 движется ролик 5, сидящий на оси рычага 6. Таким образом муфта сообщает подвешенному подводному лотку 8 колебательное движение, в результате которого транспортируемое кольцо 21, находящееся в лотке, перемещается и передается на проходящий палец 20 втулочно-роликовой транспортной депи 19.
Кинематическая схема загружателя обеспечивает (за счет соответствующей формы паза на муфте) приближение, а затем надевание кольца на палец втулочно-роликовой цепи в тот момент, когда он находится в зоне отверстия кольца.
В данном случае заглущатель работает по трем признакам логической схемы, при совокупности всех трех заданных признаков:
а)наличие кольца 21 в подводном лотке 8;
б)палец 20 свободен для надевания иа него кольца;
в)соответствие проходящего пальца запрограммированному «ольцу.
Выполнение .команд датчиков осуществляется следующим «бразом. Соблюдение первого признака контролируется рычагом-фиксатором 16, который при каладом обороте муфты поднимается вверх от плоского копира кулачка 17. При подъеме фиксатор 16 выходит из контрольного паза валика 10, при опускании он упирается в транспортируемую деталькольцо. Дальнейшее его опускание прекращается, и фиксатор не доходит АО паза валика 10. При отсутствии кольца рычаг опускается и фиксатор запирает программный валик, после чего механизм не работает.
Соблюдение второго признака осуществляется кулачком 12, который ощупывает проходящий палец 20 цепи. В случае наличия на пальце кольца кулачок 12 отклоняется и через рычаги вводит фиксатор 11 в паз программного валика 10, механизм останавли10 вается. Если палец цепи свободен, пружина
18, сидящая на рычаге кулачка 12, выводит
фиксатор 11 из паза и программный валик 10
может сработать.
Третий признак соблюдается благодаря программирующему кулачку 15, сидящему в определенном секторе звездочки 1. Кулачок 15 нажимает на упор 14 и через рычаги выдвигает фиксатор 13 из паза программного валика. После выдвижения фиксатора 13 программный валик под действием пружины опускается на цилиндрическую поверхность муфты ив момент подхода профильного паза входит в него. Муфта при этом перемещает подводной лоток 8 к цепи 19 и транспортируемое
5 кольцо, находящееся в подводном лотке, надевается на палец.
Предмет изобретения
0 Двусторонний загружатель для передачи деталей типа колец с лотка станка автоматической линии на пальцы транспортной цепи, содержащий звездочки для этой цепи и подвижные лотки, отличающийся тем, что, с целью обеспечения возможности транспортирования разных колец по заданной программе, он снабжен цевочным колесом со звездочкой, число зубьев которой кратно числу звеньев цепи и щагу удлиненных пальцев, а на оси
0 колеса установлены две подвижные муфты с кольцевой канавкой и профильным секторным пазом, против которого во втулках расположен подпружиненный палец с тремя пазами, причем первый паз связан с защелкой,,
5 соединенной рычагами с кулачком, служащим для определения наличия детали на подвижном пальце транспортной цепи, второй паз выполнен взаимодействующим с выступо.м, находящимся на рычаге, контактирующим с
0 кольцами в подвижном лотке, обеспечивающим наряду с рычагом, пазом подвижной муфты и пальцем надевание колец на пальцы транспортной цени, а третий паз пальца связан с подвижным фиксатором, который соединен посредством рычага с программирующим кулачком, установленным на звездочке против той ее впадины, к которой подойдет палец для загрузки на него -кольца.

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухсторонний разгружатель для передачи деталей | 1964 |
|
SU212018A1 |
| ОДНОШПИНДЕЛЬНЫЙ ТОКАРНЫЙ АВТОМАТ | 1935 |
|
SU50823A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ЗАГРУЗКИ, ТРАНСПОРТИРОВАНИЯ И ВЫГРУЗКИ ДЕТАЛЕЙ | 1968 |
|
SU217908A1 |
| Товарный регулятор ткацкого станка | 1982 |
|
SU1101484A1 |
| Проходная мездрильная машина | 1987 |
|
SU1588766A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| УСТАНОВКА ДЛЯ СВАРКИ ТЕРМОПЛАСТИЧНОЙ ПОЛУРУКАВНОЙ ПЛЕНКИ | 1971 |
|
SU300339A1 |
| Устройство для изменения размера ячеи сети к сетевязальной машине | 1980 |
|
SU1000497A1 |
| Конвейерное устройство для обслуживания общественных столовых | 1932 |
|
SU37822A1 |
| Машина для обработки выдувных стаканов | 1935 |
|
SU49248A1 |