Опособы измерения перемещений при помощи счетчика импульсов и .способы отсчета заданного числа импульсов, лри котором выходной сигнал снимается с дешифратора счегчика, известны.
Предлагаемый цифровой линейно-круговой и эллиптический интерполятор отличается от известных тем, что в нем применен дополнительный яереверсивный счетчик имлульсов с объемом, равным объему интерполятора, который при разгоне заполняется суммой входных -импульсов обеих прямоугольных .координат интерполятора, а при переполнении после разгона выдает сигнал на торможение.
Устройство отличается также тем, что в выходной 1цепи дополнительного счетчика импульсов установлен автоматически управляемый выключатель, замыкающийся при интерполяции того кадра, iB котором производится торможение.
Цифровой линейно-круговой и эллиптический интерполятор предложен с целью исключения ввода длины участка торможения.
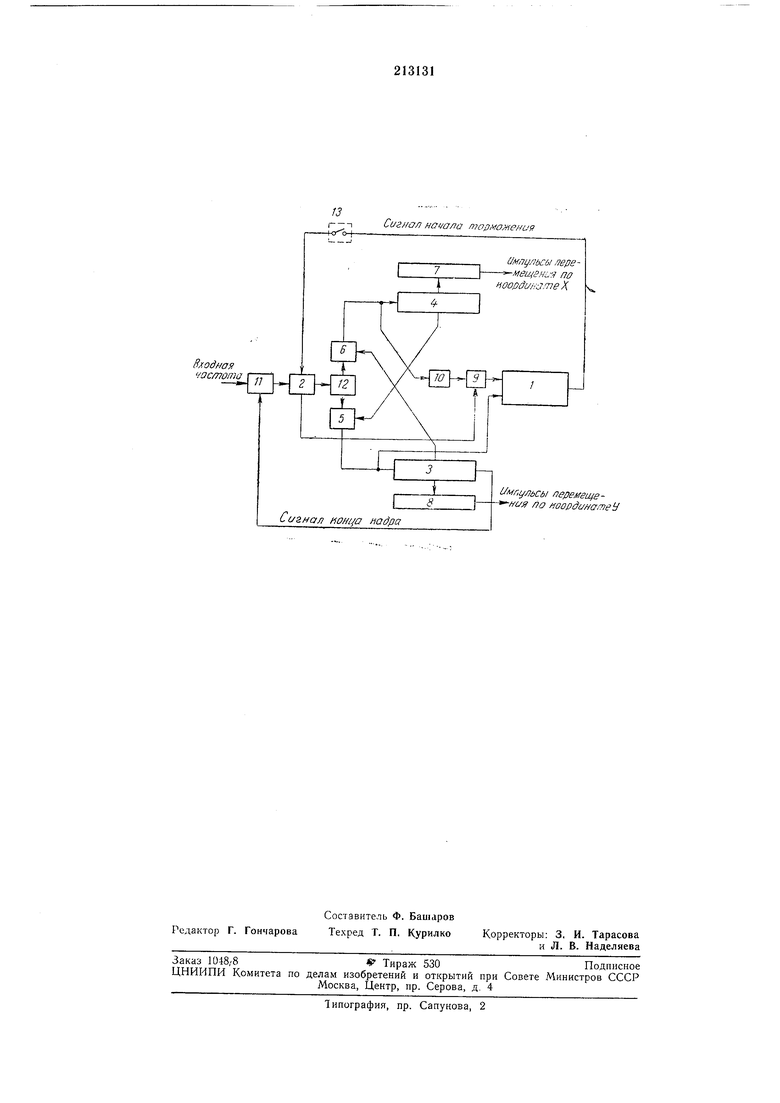
На чертеже показана система программного управления, использующая линейно-круговой интерполятор с дополнительным нереверсивным счетчиком 1 импульсов, «блок 2 разгона и торможения, счетчик 3 координаты У, счетчик 4 координаты X, два преобразователя 5 и 6, схемы совпадения 7 и S, выключатель 9,
установленный в цепь задержки 10, входной клапан 11, делитель 12 частоты.
В начале кадра счетчик 3 координаты Y, счегчик 4 координаты X и .дополнительный
счетчик 1 имеют нулевую установку. Входная частота через клапан 11, блок 2 автоматического разгона и торможения и делитель 12 Частоты поступает в счетчики 5 и 4 через преобразователи 5 и б, изменяющие частоты заполнения счетчиков таким образом, что перемещения на выходах потенциально-импульсных схем совпадения 7 и 5 соответствуют приращениям прямоугольных координат дуги окружности. При этом в схемах совпадения 7
и 8 устанавливается величина радиуса окружности. В дополнительный счетчик / поступает сумма входных частот счетчиков 3 к 4, причем входная частота счетчика 4 поступает в дополнительный счетчик через цепь задержки
10 и выключатель 9, необходимые для разделения во времени входных импульсов. В реншме круговой интерполяции выключатель 9 в период разгона включен, благодаря чему за это Время дополнительный счетчик / заполY,
У
няется больше на величину - -
R R посравнению со счетчиком 5 координаты Y интерполятора; где Хр и УТ- приращение прямоугольных координат при разгоне и торможении.
По окончании разгона выключатель 9 -отключает вход счетчика 4 координаты интерполятора от дополнительного счетчика 1 и даль-нейшее запол11ёние счетчика / .происходит на ту же -величину, что и счетчика 3 координаты У. Так как в соответствии € принциnoiM работы данного интерполятора сигнало.м конца кадра является имлульс переполнения счетчика 3 ускоряющейся координаты У, то благодаря полученному упреждению импульс переполнения дополнительного счетчика 1 появится щ момент, когда следует начинать торможение. Этот импульс поступает на блок 2 и леревадит его в режим торможения. Импульс переполнения счетчика 3 координаты закрывает клапан 11, прекращая лодачу входной частоты, чем и заканчивается кадр обработки. За этот 1ериод по обеим координатам -будут обработаны равные перемещения R, т. е. будет произведена обработка дуги окружности
В режиме линейной интерполяции система работает аналогично. Счетчики 3 4 координат интерполятора заполняются -при этом с одинаковой частотой. При разгоне (выключатель 9 включен) счетчик 1 заполняется дополнительно (по сравнению со счетчиком 3
Y Y интерполятора) на величину рдц
Гп
Го
УО - лолное приращение координаты У за кадр (аналогичные выражения можно написать для координаты X. Ввиду этого импульс дополнительного счетчика / также поступает в iMOMeHT, когда до конца кадра остаются перемещения по обеим координатам, равные соответствующим длинам торможения.
Степень заполнения -счетчиков 3 v. 4 интерполятора, т. е. отнощение числа -входных импульсов за какое-либо время к коэффициенту перелета, представляет собой относительное перемещение по данной координате за то же время (перемещение, отнесенное к лолному лриращению по данной координате за кадр -обработки).
В дополнительный счетчик 1, включенный параллельно счетчикам 3 к 4 координат интерполятора, поэтому также поступают числа импульсов, лропорциональные этим величинам. В счетчике / момент начала торможения -определяется по огносительп-ому пути разгона.
(При обработке дуг окружности больших- ,
fi
3т
например, тг,--IT и т. л. (кратных - и лежаА i
щих в целом числе квадрантов), сигнал начала торможения в .первом кадре отключается выключателем 9 и поступает на -вход блока 2 лищь в лоследнем кадре обработки данной дуги. Полученное IB первом кадре ул,реждвние
заполнения счетчика / на величину - при
этом сохраняется (циклически восстанавливается в каждом кадре) ввиду ра1венства объемов (Коэффициентов пересчета) -счетчиков 3 и У (при этом в остальных кадрах данной дуги, кроме первого, установка счетчиков на нуль не производится).
Предмет изобретения
il. Цифровой линейно-круговой и эллиптический интерполятор ло авт. св. № 184528, отличающийся тел-1, что, с -целью исключения ввода длины участка торможения, применен дополнительный нереверсивный счетчик импульсов с объемом, равным -объему интерполятора, который при разгоне -заполняется суммой входных имлульсов обеих прямоугольных координат интерполятора, а -при переполнении после разгона выдает сигнал на тор.можение.
2. Устройство по л. 1, отличающееся тем, что в выходной цепи дололнительного счетчика импульсов установлен автоматически управляемый выклю-чатель, замыкающийся при интерполяции того кадра, в котором производится торможение.
Вводная /астопю
Сиг/юл Hai/ала торможения
имг.дльсы пе1}ел( по оордс/натеУ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ЛИНЕЙНО-КРУГОВОЙ и ЭЛЛИПТИЧЕСКИЙ | 1966 |
|
SU184528A1 |
| УСТРОЙСТВО для ОПРЕДЕо1ЕНИЯ ^^«'^^"^^"Л^^нпгп ТОРМОЖЕНИЯ Б СИСТЕМЕ ЦИФРОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ СТАНКАМИ | 1967 |
|
SU195532A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для задания программы | 1986 |
|
SU1363139A1 |
| ТЕХНИЧЕСКАЯ '" БИБЛИОТЕКА | 1969 |
|
SU251269A1 |
| Устройство для задания программы | 1986 |
|
SU1312529A1 |
| Система для программного управления | 1985 |
|
SU1325410A1 |
| Линейно-круговой интерполятор | 1975 |
|
SU555381A1 |
| Устройство для задания программы | 1986 |
|
SU1348773A1 |